文章目录
- UPA的阵列响应向量(暂不考虑双极化天线)
- UPA阵列响应:从单极化天线到双极化天线
- UPA双极化天线的协方差矩阵结构
- 参考文献
UPA的阵列响应向量(暂不考虑双极化天线)
下图形象描述了UPA阵列的接收信号
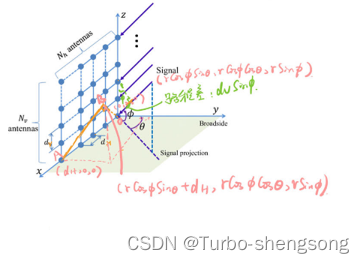
UPA阵列的水平(Horizontal)方向的天线间距为dHd_HdH,垂直(Vertical)方向的天线间距为dVd_VdV,图中BA是点A处的阵元接收到的信号方向,我们需要衡量水平、垂直两个方向的路径差。
(1)水平方向的路径差
考虑三角形OAB,我们从图中可以看出三个点的坐标分别为:(0,0,0),(dH,0,0),(rcosϕsinθ+dH,rcosϕcosθ,rsinϕ)(0,0,0),(d_H,0,0),(r \cos \phi \sin \theta + d_H, r \cos \phi \cos \theta, r \sin \phi)(0,0,0),(dH,0,0),(rcosϕsinθ+dH,rcosϕcosθ,rsinϕ),可以进一步计算该三角形三条边的长度
OA=dHOB=∣(rcosϕsinθ+dH,rcosϕcosθ,rsinϕ)∣AB=r\begin{aligned} OA &= d_H \\ OB &= \left | (r \cos \phi \sin \theta + d_H, r \cos \phi \cos \theta, r \sin \phi) \right| \\ AB &= r \end{aligned} OAOBAB=dH=∣(rcosϕsinθ+dH,rcosϕcosθ,rsinϕ)∣=r
根据三角余弦定理,我们可以得到
cos∠OAB=∣AB∣2+∣OA∣2−∣OB∣22∣AB∣⋅∣OA∣=r2+dH2−(r2+dH2+2dHrcosϕsinθ)2rdH=cosϕsinθ\begin{aligned} \cos {\angle {OAB}} &= \frac { |AB|^2 + |OA|^2 - |OB|^2 }{2 |AB| \cdot |OA|} \\ &= \frac{ r^2 + d^2_H - (r^2 + d^2_H+ 2 d_H r \cos \phi \sin \theta) } {2 r d_H} \\ &= \cos \phi \sin \theta \end{aligned} cos∠OAB=2∣AB∣⋅∣OA∣∣AB∣2+∣OA∣2−∣OB∣2=2rdHr2+dH2−(r2+dH2+2dHrcosϕsinθ)=cosϕsinθ
因此水平方向的路径差为:
ΔH=dHcos∠OAB=dHcosϕsinθ\Delta_H = d_H \cos {\angle {OAB}} = d_H \cos \phi \sin \theta ΔH=dHcos∠OAB=dHcosϕsinθ
(2)垂直方向的路径差
不难看出,垂直方向的路径差为
ΔV=dVsinϕ\Delta_V= d_V \sin \phi ΔV=dVsinϕ
因此阵列响应向量对应的延时(相位)部分可以表征为:
Ψ(u−1)NH+v(ϕ,θ)=2πλ[(u−1)dVsinϕ+(v−1)dHcosϕsinθ]\Psi_{(u-1)N_H+v}(\phi, \theta) = \frac{2 \pi}{\lambda} \left [ (u-1) d_V \sin \phi + (v-1)d_H \cos \phi \sin \theta \right] Ψ(u−1)NH+v(ϕ,θ)=λ2π[(u−1)dVsinϕ+(v−1)dHcosϕsinθ]
其中1≤u≤NV,1≤v≤NH1 \leq u \leq N_V, 1 \leq v \leq N_H1≤u≤NV,1≤v≤NH。
为了与论文[1]的符号对齐,这里我们令
cosθ1=sinϕsinθ2=sinθ\begin{aligned} \cos \theta_1 &= \sin \phi \\ \sin \theta_2&= \sin \theta \end{aligned} cosθ1sinθ2=sinϕ=sinθ
令θ=(θ1,θ2)T\boldsymbol \theta = (\theta_1, \theta_2)^Tθ=(θ1,θ2)T,这时UPA阵列响应向量中含相位的项为
ejΨ(θ):=[ejΨ1(θ),ejΨ2(θ),⋯,ejΨNVNH(θ)]T∈CNVNH×1e^{j \boldsymbol \Psi(\boldsymbol \theta)} := \left [ e^{j \Psi_1(\boldsymbol \theta)}, e^{j \Psi_2(\boldsymbol \theta)}, \cdots, e^{j \Psi_{N_V N_H}(\boldsymbol \theta)} \right]^T \in \mathbb C^{N_V N_H \times 1} ejΨ(θ):=[ejΨ1(θ),ejΨ2(θ),⋯,ejΨNVNH(θ)]T∈CNVNH×1
其中:
Ψ(u−1)NH+v(θ)=2πλ[(u−1)dVcosθ1+(v−1)dHsinθ1sinθ2],1≤u≤NV,1≤v≤NH\Psi_{(u-1)N_H+v}(\boldsymbol \theta) = \frac{2 \pi}{\lambda} \left [ (u-1) d_V \cos \theta_1 + (v-1)d_H \sin \theta_1 \sin \theta_2 \right], \ \ 1 \leq u \leq N_V, 1 \leq v \leq N_H Ψ(u−1)NH+v(θ)=λ2π[(u−1)dVcosθ1+(v−1)dHsinθ1sinθ2], 1≤u≤NV,1≤v≤NH
更进一步,UPA阵列响应向量为(包含水平方向和垂直方向):
aV(θ)=aV(θ)ejΨ(θ)∈CNVNH×1aH(θ)=aH(θ)ejΨ(θ)∈CNVNH×1\begin{aligned} \boldsymbol a_V (\boldsymbol \theta) &= a_V(\boldsymbol \theta) e^{j \boldsymbol \Psi(\boldsymbol \theta)} \in \mathbb C^{N_V N_H \times 1} \\ \boldsymbol a_H (\boldsymbol \theta) &= a_H(\boldsymbol \theta) e^{j \boldsymbol \Psi(\boldsymbol \theta)} \in \mathbb C^{N_V N_H \times 1} \\ \end{aligned} aV(θ)aH(θ)=aV(θ)ejΨ(θ)∈CNVNH×1=aH(θ)ejΨ(θ)∈CNVNH×1
其中aV(θ),aH(θ)∈Ra_V(\boldsymbol \theta),a_H(\boldsymbol \theta) \in \mathbb RaV(θ),aH(θ)∈R表示天线本身的field pattern(对应幅度的概念)。
UPA阵列响应:从单极化天线到双极化天线
注意到,上一章节所推演的阵列响应响应为单极化UPA阵列。对于双极化UPA,其阵列响应向量定义为
aV(θ)=[aV,1(θ)aV,2(θ)]⊗ejΨ(θ)∈C2NVNH×1aH(θ)=[aH,1(θ)aH,2(θ)]⊗ejΨ(θ)∈C2NVNH×1\begin{aligned} \boldsymbol a_V (\boldsymbol \theta) &= \left[ \begin{array}{c} a_{V,1}\left( \boldsymbol{\theta } \right)\\ a_{V,2}\left( \boldsymbol{\theta } \right)\\ \end{array} \right] \otimes e^{j \boldsymbol \Psi(\boldsymbol \theta)} \in \mathbb C^{2 N_V N_H \times 1} \\ \boldsymbol a_H (\boldsymbol \theta) &= \left[ \begin{array}{c} a_{H,1}\left( \boldsymbol{\theta } \right)\\ a_{H,2}\left( \boldsymbol{\theta } \right)\\ \end{array} \right] \otimes e^{j \boldsymbol \Psi(\boldsymbol \theta)} \in \mathbb C^{2 N_V N_H \times 1} \end{aligned} aV(θ)aH(θ)=[aV,1(θ)aV,2(θ)]⊗ejΨ(θ)∈C2NVNH×1=[aH,1(θ)aH,2(θ)]⊗ejΨ(θ)∈C2NVNH×1
其中aV,1,aV,2∈Ra_{V,1},a_{V,2} \in \mathbb RaV,1,aV,2∈R分别表示垂直方向上,+45°+45 \degree+45°和−45°-45 \degree−45°极化天线的field pattern,为天线固有的值,不受环境影响。
UPA双极化天线的协方差矩阵结构
双极化UPA阵列的协方差矩阵为
R=∫ΩρV(θ)aV(θ)aVH(θ)dθ+∫ΩρH(θ)aH(θ)aHH(θ)dθ∈C2NVNH×2NVNH\boldsymbol R= \int_{\Omega} \rho_V(\boldsymbol \theta) \boldsymbol a_V(\boldsymbol \theta) \boldsymbol a_V^H(\boldsymbol \theta) d \boldsymbol \theta + \int_{\Omega} \rho_H(\boldsymbol \theta) \boldsymbol a_H(\boldsymbol \theta) \boldsymbol a_H^H(\boldsymbol \theta) d \boldsymbol \theta \in \mathbb C^{2 N_V N_H \times 2 N_V N_H} R=∫ΩρV(θ)aV(θ)aVH(θ)dθ+∫ΩρH(θ)aH(θ)aHH(θ)dθ∈C2NVNH×2NVNH
不失一般性,这里我们只关注aV(θ)aVH(θ)\boldsymbol a_V(\boldsymbol \theta) \boldsymbol a_V^H(\boldsymbol \theta)aV(θ)aVH(θ)
aV(θ)aVH(θ)=([aV,1(θ)aV,2(θ)]⊗ejΨ(θ))([aV,1(θ)aV,2(θ)]⊗ejΨ(θ))H=([aV,1(θ)aV,2(θ)]⊗ejΨ(θ))([aV,1(θ)aV,2(θ)]T⊗(ejΨ(θ))H)=[aV,12(θ)aV,1(θ)aV,2(θ)aV,2(θ)aV,1(θ)aV,22(θ)]⊗(ejΨ(θ)(ejΨ(θ))H)\begin{aligned} \boldsymbol a_V(\boldsymbol \theta) \boldsymbol a_V^H(\boldsymbol \theta) &= \left ( \left[ \begin{array}{c} a_{V,1}\left( \boldsymbol{\theta } \right)\\ a_{V,2}\left( \boldsymbol{\theta } \right)\\ \end{array} \right] \otimes e^{j \boldsymbol \Psi(\boldsymbol \theta)} \right) \left ( \left[ \begin{array}{c} a_{V,1}\left( \boldsymbol{\theta } \right)\\ a_{V,2}\left( \boldsymbol{\theta } \right)\\ \end{array} \right] \otimes e^{j \boldsymbol \Psi(\boldsymbol \theta)} \right)^H \\ &=\left ( \left[ \begin{array}{c} a_{V,1}\left( \boldsymbol{\theta } \right)\\ a_{V,2}\left( \boldsymbol{\theta } \right)\\ \end{array} \right] \otimes e^{j \boldsymbol \Psi(\boldsymbol \theta)} \right) \left ( \left[ \begin{array}{c} a_{V,1}\left( \boldsymbol{\theta } \right)\\ a_{V,2}\left( \boldsymbol{\theta } \right)\\ \end{array} \right]^T \otimes \left( e^{j \boldsymbol \Psi(\boldsymbol \theta)} \right )^H \right) \\ &= \left[ \begin{matrix} a_{V,1}^{2}\left( \boldsymbol{\theta } \right)& a_{V,1}\left( \boldsymbol{\theta } \right) a_{V,2}\left( \boldsymbol{\theta } \right)\\ a_{V,2}\left( \boldsymbol{\theta } \right) a_{V,1}\left( \boldsymbol{\theta } \right)& a_{V,2}^{2}\left( \boldsymbol{\theta } \right)\\ \end{matrix} \right] \otimes \left ( e^{j \boldsymbol \Psi(\boldsymbol \theta)} \left( e^{j \boldsymbol \Psi(\boldsymbol \theta)} \right )^H \right) \end{aligned} aV(θ)aVH(θ)=([aV,1(θ)aV,2(θ)]⊗ejΨ(θ))([aV,1(θ)aV,2(θ)]⊗ejΨ(θ))H=([aV,1(θ)aV,2(θ)]⊗ejΨ(θ))([aV,1(θ)aV,2(θ)]T⊗(ejΨ(θ))H)=[aV,12(θ)aV,2(θ)aV,1(θ)aV,1(θ)aV,2(θ)aV,22(θ)]⊗(ejΨ(θ)(ejΨ(θ))H)
我们不难看出,协方差矩阵R∈C2NVNH×2NVNH\boldsymbol R \in \mathbb C^{2 N_V N_H \times 2 N_V N_H}R∈C2NVNH×2NVNH,具有特定的块结构,可写为
R=[B1B2HB2B3]∈C2NVNH×2NVNH\boldsymbol R = \left[ \begin{matrix} \boldsymbol{B}_1& \boldsymbol{B}_{2}^{H}\\ \boldsymbol{B}_2& \boldsymbol{B}_3\\ \end{matrix} \right] \in \mathbb C^{2 N_V N_H \times 2 N_V N_H} R=[B1B2B2HB3]∈C2NVNH×2NVNH
其中B1,B2,B3∈CNVNH×NVNH\boldsymbol{B}_1,\boldsymbol{B}_2,\boldsymbol{B}_3 \in \mathbb C^{ N_V N_H \times N_V N_H}B1,B2,B3∈CNVNH×NVNH具有相同的结构性质,且不难看出,该性质取决于ejΨ(θ)(ejΨ(θ))H∈CNVNH×NVNHe^{j \boldsymbol \Psi(\boldsymbol \theta)} \left( e^{j \boldsymbol \Psi(\boldsymbol \theta)} \right )^H \in \mathbb C^{ N_V N_H \times N_V N_H}ejΨ(θ)(ejΨ(θ))H∈CNVNH×NVNH。回顾ejΨ(θ)e^{j \boldsymbol \Psi(\boldsymbol \theta)}ejΨ(θ)的表达式:
ejΨ(θ)=[ejΨ1(θ),ejΨ2(θ),⋯,ejΨNVNH(θ)]TΨ(u−1)NH+v(θ)=2πλ[(u−1)dVcosθ1+(v−1)dHsinθ1sinθ2]\begin{aligned} e^{j \boldsymbol \Psi(\boldsymbol \theta)} &= \left [ e^{j \Psi_1(\boldsymbol \theta)}, e^{j \Psi_2(\boldsymbol \theta)}, \cdots, e^{j \Psi_{N_V N_H}(\boldsymbol \theta)} \right]^T \\ \Psi_{(u-1)N_H+v}(\boldsymbol \theta) &= \frac{2 \pi}{\lambda} \left [ (u-1) d_V \cos \theta_1 + (v-1)d_H \sin \theta_1 \sin \theta_2 \right] \end{aligned} ejΨ(θ)Ψ(u−1)NH+v(θ)=[ejΨ1(θ),ejΨ2(θ),⋯,ejΨNVNH(θ)]T=λ2π[(u−1)dVcosθ1+(v−1)dHsinθ1sinθ2]
我们不妨先固定u0∈{1,⋯,NV}u_0 \in \{1,\cdots,N_V\}u0∈{1,⋯,NV},取子向量(ejΨk(θ):k=(u0−1)NH+v,v=1,⋯,NH)∈CNH×1\left (e^{j \Psi_k(\boldsymbol \theta)}: k=(u_0-1)N_H+v, v=1,\cdots,N_H \right) \in \mathbb C^{N_H \times 1}(ejΨk(θ):k=(u0−1)NH+v,v=1,⋯,NH)∈CNH×1,令
∣u0⟩=(ejΨk(θ):k=(u0−1)NH+v,v=1,⋯,NH)∈CNH×1|u_0 \rangle = \left (e^{j \Psi_k(\boldsymbol \theta)}: k=(u_0-1)N_H+v, v=1,\cdots,N_H \right) \in \mathbb C^{N_H \times 1} ∣u0⟩=(ejΨk(θ):k=(u0−1)NH+v,v=1,⋯,NH)∈CNH×1
(这里存在一定程度的符号滥用,但为了方便叙述,我们选择采用量子力学中常用的狄拉克符号),则ejΨ(θ)(ejΨ(θ))H∈CNVNH×NVNHe^{j \boldsymbol \Psi(\boldsymbol \theta)} \left( e^{j \boldsymbol \Psi(\boldsymbol \theta)} \right )^H \in \mathbb C^{ N_V N_H \times N_V N_H}ejΨ(θ)(ejΨ(θ))H∈CNVNH×NVNH可以写为
ejΨ(θ)(ejΨ(θ))H=[∣1⟩⟨1∣∣1⟩⟨2∣∣1⟩⟨3∣⋯∣1⟩⟨NV∣∣2⟩⟨1∣∣2⟩⟨2∣∣2⟩⟨3∣⋯⋮∣3⟩⟨1∣∣3⟩⟨2∣∣3⟩⟨3∣⋯∣NV−1⟩⟨NV∣⋮⋮⋮⋱∣NV−1⟩⟨NV∣∣NV⟩⟨1∣⋯∣NV⟩⟨NV−2∣∣NV⟩⟨NV−1∣∣NV⟩⟨NV∣]e^{j \boldsymbol \Psi(\boldsymbol \theta)} \left( e^{j \boldsymbol \Psi(\boldsymbol \theta)} \right )^H=\left[ \begin{matrix}{} |1\rangle \langle 1|& |1\rangle \langle 2|& |1\rangle \langle 3|& \cdots& |1\rangle \langle N_V|\\ |2\rangle \langle 1|& |2\rangle \langle 2|& |2\rangle \langle 3|& \cdots& \vdots\\ |3\rangle \langle 1|& |3\rangle \langle 2|& |3\rangle \langle 3|& \cdots& |N_V-1\rangle \langle N_V|\\ \vdots& \vdots& \vdots& \ddots& |N_V-1\rangle \langle N_V|\\ |N_V\rangle \langle 1|& \cdots& |N_V\rangle \langle N_V-2|& |N_V\rangle \langle N_V-1|& |N_V\rangle \langle N_V|\\ \end{matrix} \right] ejΨ(θ)(ejΨ(θ))H=∣1⟩⟨1∣∣2⟩⟨1∣∣3⟩⟨1∣⋮∣NV⟩⟨1∣∣1⟩⟨2∣∣2⟩⟨2∣∣3⟩⟨2∣⋮⋯∣1⟩⟨3∣∣2⟩⟨3∣∣3⟩⟨3∣⋮∣NV⟩⟨NV−2∣⋯⋯⋯⋱∣NV⟩⟨NV−1∣∣1⟩⟨NV∣⋮∣NV−1⟩⟨NV∣∣NV−1⟩⟨NV∣∣NV⟩⟨NV∣
首先,我们不难发现
∣i⟩⟨j∣=∣i+d⟩⟨j+d∣,∀d|i \rangle \langle j| = |i+d \rangle \langle j+d|, \ \ \forall d ∣i⟩⟨j∣=∣i+d⟩⟨j+d∣, ∀d
因此,我们只需要关注∣1⟩⟨1∣,∣2⟩⟨1∣,⋯,∣NV⟩⟨1∣|1\rangle \langle 1|, |2\rangle \langle 1|, \cdots, |N_V\rangle \langle 1|∣1⟩⟨1∣,∣2⟩⟨1∣,⋯,∣NV⟩⟨1∣即可
当u0=1u_0=1u0=1时
∣1⟩⟨1∣=[1ej2πλdHsinθ1sinθ2ej2πλ2dHsinθ1sinθ2⋮ej2πλ(NH−1)dHsinθ1sinθ2][1ej2πλdHsinθ1sinθ2ej2πλ2dHsinθ1sinθ2⋮ej2πλ(NH−1)dHsinθ1sinθ2]H|1\rangle \langle 1| = \left[ \begin{array}{l} 1\\ e^{j\frac{2\pi}{\lambda}d_H \sin \theta_1 \sin \theta_2}\\ e^{j\frac{2\pi}{\lambda}2d_H \sin \theta_1 \sin \theta_2} \\ \vdots \\ e^{j\frac{2\pi}{\lambda}(N_H-1)d_H \sin \theta_1 \sin \theta_2}\\ \end{array} \right] \left[ \begin{array}{l} 1\\ e^{j\frac{2\pi}{\lambda}d_H \sin \theta_1 \sin \theta_2}\\ e^{j\frac{2\pi}{\lambda}2d_H \sin \theta_1 \sin \theta_2} \\ \vdots \\ e^{j\frac{2\pi}{\lambda}(N_H-1)d_H \sin \theta_1 \sin \theta_2}\\ \end{array} \right]^H ∣1⟩⟨1∣=1ejλ2πdHsinθ1sinθ2ejλ2π2dHsinθ1sinθ2⋮ejλ2π(NH−1)dHsinθ1sinθ21ejλ2πdHsinθ1sinθ2ejλ2π2dHsinθ1sinθ2⋮ejλ2π(NH−1)dHsinθ1sinθ2H
不难发现,上述写法直接对应到ULA阵,因此对应部分的块矩阵满足Toplitz性。
当u0>1u_0 > 1u0>1时
∣u0⟩⟨1∣=(ej2πλ(u0−1)dV[1ej2πλdHsinθ1sinθ2ej2πλ2dHsinθ1sinθ2⋮ej2πλ(NH−1)dHsinθ1sinθ2])[1ej2πλdHsinθ1sinθ2ej2πλ2dHsinθ1sinθ2⋮ej2πλ(NH−1)dHsinθ1sinθ2]H=ej2πλ(u0−1)dV[1ej2πλdHsinθ1sinθ2ej2πλ2dHsinθ1sinθ2⋮ej2πλ(NH−1)dHsinθ1sinθ2][1ej2πλdHsinθ1sinθ2ej2πλ2dHsinθ1sinθ2⋮ej2πλ(NH−1)dHsinθ1sinθ2]H\begin{aligned} |u_0 \rangle \langle 1| &=\left ( e^{j \frac{2\pi}{\lambda}(u_0-1)d_V} \left[ \begin{array}{l} 1\\ e^{j\frac{2\pi}{\lambda}d_H \sin \theta_1 \sin \theta_2}\\ e^{j\frac{2\pi}{\lambda}2d_H \sin \theta_1 \sin \theta_2} \\ \vdots \\ e^{j\frac{2\pi}{\lambda}(N_H-1)d_H \sin \theta_1 \sin \theta_2}\\ \end{array} \right] \right ) \left[ \begin{array}{l} 1\\ e^{j\frac{2\pi}{\lambda}d_H \sin \theta_1 \sin \theta_2}\\ e^{j\frac{2\pi}{\lambda}2d_H \sin \theta_1 \sin \theta_2} \\ \vdots \\ e^{j\frac{2\pi}{\lambda}(N_H-1)d_H \sin \theta_1 \sin \theta_2}\\ \end{array} \right]^H \\ &= e^{j \frac{2\pi}{\lambda}(u_0-1)d_V} \left[ \begin{array}{l} 1\\ e^{j\frac{2\pi}{\lambda}d_H \sin \theta_1 \sin \theta_2}\\ e^{j\frac{2\pi}{\lambda}2d_H \sin \theta_1 \sin \theta_2} \\ \vdots \\ e^{j\frac{2\pi}{\lambda}(N_H-1)d_H \sin \theta_1 \sin \theta_2}\\ \end{array} \right] \left[ \begin{array}{l} 1\\ e^{j\frac{2\pi}{\lambda}d_H \sin \theta_1 \sin \theta_2}\\ e^{j\frac{2\pi}{\lambda}2d_H \sin \theta_1 \sin \theta_2} \\ \vdots \\ e^{j\frac{2\pi}{\lambda}(N_H-1)d_H \sin \theta_1 \sin \theta_2}\\ \end{array} \right]^H \end{aligned} ∣u0⟩⟨1∣=ejλ2π(u0−1)dV1ejλ2πdHsinθ1sinθ2ejλ2π2dHsinθ1sinθ2⋮ejλ2π(NH−1)dHsinθ1sinθ21ejλ2πdHsinθ1sinθ2ejλ2π2dHsinθ1sinθ2⋮ejλ2π(NH−1)dHsinθ1sinθ2H=ejλ2π(u0−1)dV1ejλ2πdHsinθ1sinθ2ejλ2π2dHsinθ1sinθ2⋮ejλ2π(NH−1)dHsinθ1sinθ21ejλ2πdHsinθ1sinθ2ejλ2π2dHsinθ1sinθ2⋮ejλ2π(NH−1)dHsinθ1sinθ2H
注意到,无论是∣1⟩⟨1∣|1\rangle \langle 1|∣1⟩⟨1∣还是∣u0⟩⟨1∣,u0>1|u_0 \rangle \langle 1|,u_0 > 1∣u0⟩⟨1∣,u0>1,大家都有一个公共的Toeplitz结构,即
[1ej2πλdHsinθ1sinθ2ej2πλ2dHsinθ1sinθ2⋮ej2πλ(NH−1)dHsinθ1sinθ2][1ej2πλdHsinθ1sinθ2ej2πλ2dHsinθ1sinθ2⋮ej2πλ(NH−1)dHsinθ1sinθ2]H=[α1α2∗⋯αNH∗α2α1⋱⋮⋮⋱⋱α2∗αNH⋯α2α1]∈CNH×NH\left[ \begin{array}{l} 1\\ e^{j\frac{2\pi}{\lambda}d_H \sin \theta_1 \sin \theta_2}\\ e^{j\frac{2\pi}{\lambda}2d_H \sin \theta_1 \sin \theta_2} \\ \vdots \\ e^{j\frac{2\pi}{\lambda}(N_H-1)d_H \sin \theta_1 \sin \theta_2}\\ \end{array} \right] \left[ \begin{array}{l} 1\\ e^{j\frac{2\pi}{\lambda}d_H \sin \theta_1 \sin \theta_2}\\ e^{j\frac{2\pi}{\lambda}2d_H \sin \theta_1 \sin \theta_2} \\ \vdots \\ e^{j\frac{2\pi}{\lambda}(N_H-1)d_H \sin \theta_1 \sin \theta_2}\\ \end{array} \right]^H = \left[ \begin{matrix} \alpha _1& \alpha _{2}^{*}& \cdots& \alpha _{N_H}^{*}\\ \alpha _2& \alpha _1& \ddots& \vdots\\ \vdots& \ddots& \ddots& \alpha _{2}^{*}\\ \alpha _{N_H}& \cdots& \alpha _2& \alpha _1\\ \end{matrix} \right] \in \mathbb C^{N_H \times N_H} 1ejλ2πdHsinθ1sinθ2ejλ2π2dHsinθ1sinθ2⋮ejλ2π(NH−1)dHsinθ1sinθ21ejλ2πdHsinθ1sinθ2ejλ2π2dHsinθ1sinθ2⋮ejλ2π(NH−1)dHsinθ1sinθ2H=α1α2⋮αNHα2∗α1⋱⋯⋯⋱⋱α2αNH∗⋮α2∗α1∈CNH×NH
因为积分无非就是加权求和,并不改变上述积分内部矩阵的结构,因此我们得出如下结论:
(1)若波长λ\lambdaλ和dVd_VdV未知,即系数ej2πλ(u0−1)dVe^{j \frac{2\pi}{\lambda}(u_0-1)d_V}ejλ2π(u0−1)dV未知,则协方差矩阵
R=[B1B2HB2B3]∈C2NVNH×2NVNH\boldsymbol R = \left[ \begin{matrix} \boldsymbol{B}_1& \boldsymbol{B}_{2}^{H}\\ \boldsymbol{B}_2& \boldsymbol{B}_3\\ \end{matrix} \right] \in \mathbb C^{2 N_V N_H \times 2 N_V N_H} R=[B1B2B2HB3]∈C2NVNH×2NVNH
的每一个块矩阵B1,B2,B3∈CNVNH×NVNH\boldsymbol{B}_1,\boldsymbol{B}_2,\boldsymbol{B}_3 \in \mathbb C^{ N_V N_H \times N_V N_H}B1,B2,B3∈CNVNH×NVNH具有相同的结构,即
Bl=[Bl,1Bl,2HBl,3H⋯Bl,NVHBl,2Bl,1Bl,2H⋱⋮Bl,3Bl,2Bl,1⋱Bl,3H⋮⋱⋱⋱Bl,2HBl,NV⋯Bl,3Bl,2Bl,1]∈CNVNH×NVNH\boldsymbol{B}_l=\left[ \begin{matrix}{} \boldsymbol{B}_{l,1}& \boldsymbol{B}_{l,2}^{H}& \boldsymbol{B}_{l,3}^{H}& \cdots& \boldsymbol{B}_{l,N_V}^{H}\\ \boldsymbol{B}_{l,2}& \boldsymbol{B}_{l,1}& \boldsymbol{B}_{l,2}^{H}& \ddots& \vdots\\ \boldsymbol{B}_{l,3}& \boldsymbol{B}_{l,2}& \boldsymbol{B}_{l,1}& \ddots& \boldsymbol{B}_{l,3}^{H}\\ \vdots& \ddots& \ddots& \ddots& \boldsymbol{B}_{l,2}^{H}\\ \boldsymbol{B}_{l,N_V}& \cdots& \boldsymbol{B}_{l,3}& \boldsymbol{B}_{l,2}& \boldsymbol{B}_{l,1}\\ \end{matrix} \right] \in \mathbb{C}^{ N_V N_H \times N_V N_H } Bl=Bl,1Bl,2Bl,3⋮Bl,NVBl,2HBl,1Bl,2⋱⋯Bl,3HBl,2HBl,1⋱Bl,3⋯⋱⋱⋱Bl,2Bl,NVH⋮Bl,3HBl,2HBl,1∈CNVNH×NVNH
其中
Bl,1=β⋅[α1α2∗⋯αNH∗α2α1⋱⋮⋮⋱⋱α2∗αNH⋯α2α1]∈CNH×NH,β∈R\boldsymbol{B}_{l,1} = \beta \cdot \left[ \begin{matrix} \alpha _1& \alpha _{2}^{*}& \cdots& \alpha _{N_H}^{*}\\ \alpha _2& \alpha _1& \ddots& \vdots\\ \vdots& \ddots& \ddots& \alpha _{2}^{*}\\ \alpha _{N_H}& \cdots& \alpha _2& \alpha _1\\ \end{matrix} \right] \in \mathbb C^{N_H \times N_H}, \beta \in \mathbb R Bl,1=β⋅α1α2⋮αNHα2∗α1⋱⋯⋯⋱⋱α2αNH∗⋮α2∗α1∈CNH×NH,β∈R
Bl,u0=β⋅ej2πλ(u0−1)dV⋅[α1α2∗⋯αNH∗α2α1⋱⋮⋮⋱⋱α2∗αNH⋯α2α1]∈CNH×NH,β∈R,u0>1\boldsymbol{B}_{l,u_0} = \beta \cdot e^{j \frac{2\pi}{\lambda}(u_0-1)d_V} \cdot \left[ \begin{matrix} \alpha _1& \alpha _{2}^{*}& \cdots& \alpha _{N_H}^{*}\\ \alpha _2& \alpha _1& \ddots& \vdots\\ \vdots& \ddots& \ddots& \alpha _{2}^{*}\\ \alpha _{N_H}& \cdots& \alpha _2& \alpha _1\\ \end{matrix} \right] \in \mathbb C^{N_H \times N_H}, \beta \in \mathbb R, u_0 > 1 Bl,u0=β⋅ejλ2π(u0−1)dV⋅α1α2⋮αNHα2∗α1⋱⋯⋯⋱⋱α2αNH∗⋮α2∗α1∈CNH×NH,β∈R,u0>1
- Bl,1\boldsymbol{B}_{l,1}Bl,1的自由度为NHN_HNH
- Bl,u0,u0>1\boldsymbol{B}_{l,u_0}, u_0 > 1Bl,u0,u0>1的自由度为NH+NH−1N_H+N_H-1NH+NH−1(甚至还可以再压缩)
(2)若系数ej2πλ(u0−1)dVe^{j \frac{2\pi}{\lambda}(u_0-1)d_V}ejλ2π(u0−1)dV已知,则
- Bl,1\boldsymbol{B}_{l,1}Bl,1的自由度为NHN_HNH
- Bl,u0,u0>1\boldsymbol{B}_{l,u_0}, u_0 > 1Bl,u0,u0>1的自由度为NHN_HNH
本质上,此时协方差矩阵的自由度可以降为NHN_HNH。
参考文献
[1] L. Miretti, R. L. G. Cavalcante and S. Stańczak, “Channel Covariance Conversion and Modelling Using Infinite Dimensional Hilbert Spaces,” in IEEE Transactions on Signal Processing, vol. 69, pp. 3145-3159, 2021, doi: 10.1109/TSP.2021.3082461.