九月SLAM相关论文速递
| 论文列表 |
|---|
| DirectTracker: 3D Multi-Object Tracking Using Direct Image Alignment and Photometric Bundle Adjustment |
| 3D VSG: Long-term Semantic Scene Change Prediction through 3D Variable Scene Graphs |
| Leveraging Large Language Models for Robot 3D Scene Understanding |
| D-Lite: Navigation-Oriented Compression of 3D Scene Graphs under Communication Constraints |
| WiSion: Bolstering MAV 3D Indoor State Estimation by Embracing Multipath of WiFi |
| General Place Recognition Survey: Towards the Real-world Autonomy Age |
| ExplORB-SLAM: Active Visual SLAM Exploiting the Pose-graph Topology |
| Continual Adaptation of Semantic Segmentation using Complementary 2D-3D Data Representations |
| Differential Flatness-Based Trajectory Planning for Autonomous Vehicles |
| Hilti-Oxford Dataset: A Millimetre-Accurate Benchmark for Simultaneous Localization and Mapping |
| E-NeRF: Neural Radiance Fields from a Moving Event Camera |
| Robust Incremental Smoothing and Mapping (riSAM) |
| Semi-Direct Point-Line Visual Inertial Odometry for MAVs |
| 3D Reconstruction by Pretrained Features and Visual-Inertial Odometry |
| A Coupled Visual and Inertial Measurement Units Method for Locating and Mapping in Coal Mine Tunnel |
| Deep Pose Graph-Matching-Based Loop Closure Detection for Semantic Visual SLAM |
| Efficient 3D Lidar Odometry Based on Planar Patches |
| Orbeez-SLAM: A Real-time Monocular Visual SLAM with ORB Features and NeRF-realized Mapping |
| Efficient and Consistent Two Key-Frame Visual-Inertial Navigation Using Matrix Lie Groups |
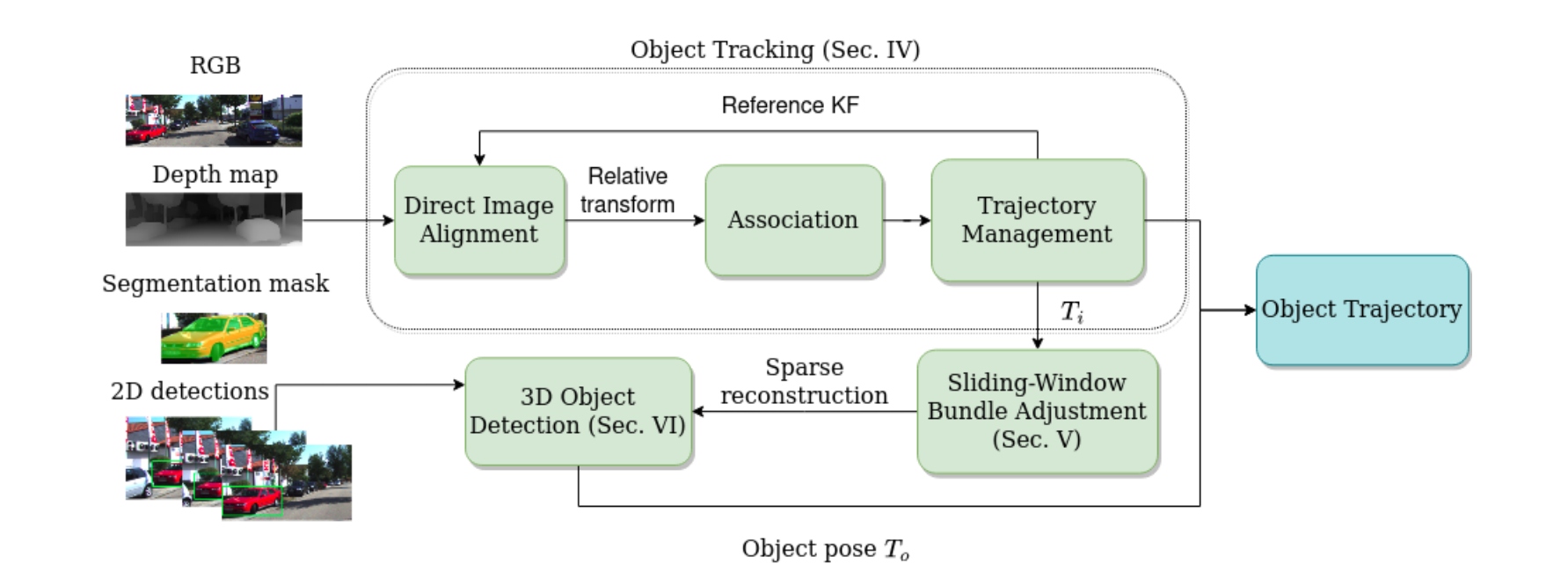
DirectTracker: 3D Multi-Object Tracking Using Direct Image Alignment and Photometric Bundle Adjustment
融合工作
SLAM得到的地图和位姿数据 + 2D分割/掩膜分割结果 + 运动预测跟踪等 = 3D目标跟踪
是一种比较新奇的方法,相较于端到端的更具有可解释性。
3D VSG: Long-term Semantic Scene Change Prediction through 3D Variable Scene Graphs
针对 语义SLAM + 长期SLAM任务中物体位置移动,进行的改进。
- 提出三维可变图对语义场景进行建模
- 利用网络学习得到每种物体位置变化的概率
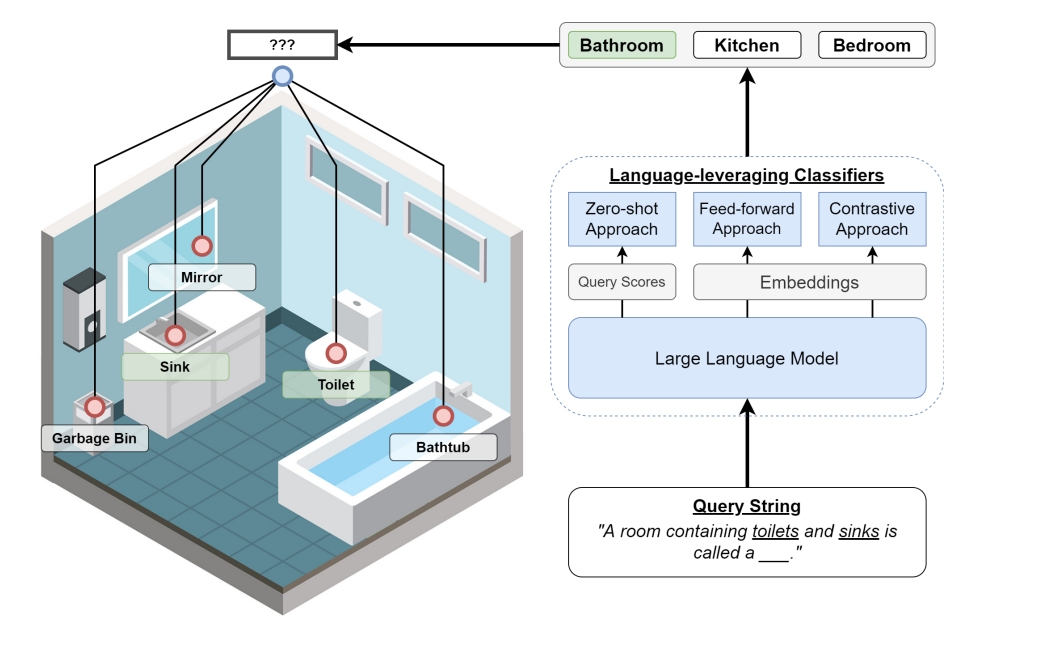
Leveraging Large Language Models for Robot 3D Scene Understanding
室内家居环境中的场景理解问题。
利用语言模型进行推断,输入“一个房间包含xxx、xxx,那么这个房间是____”。输出对房间类型的推断。
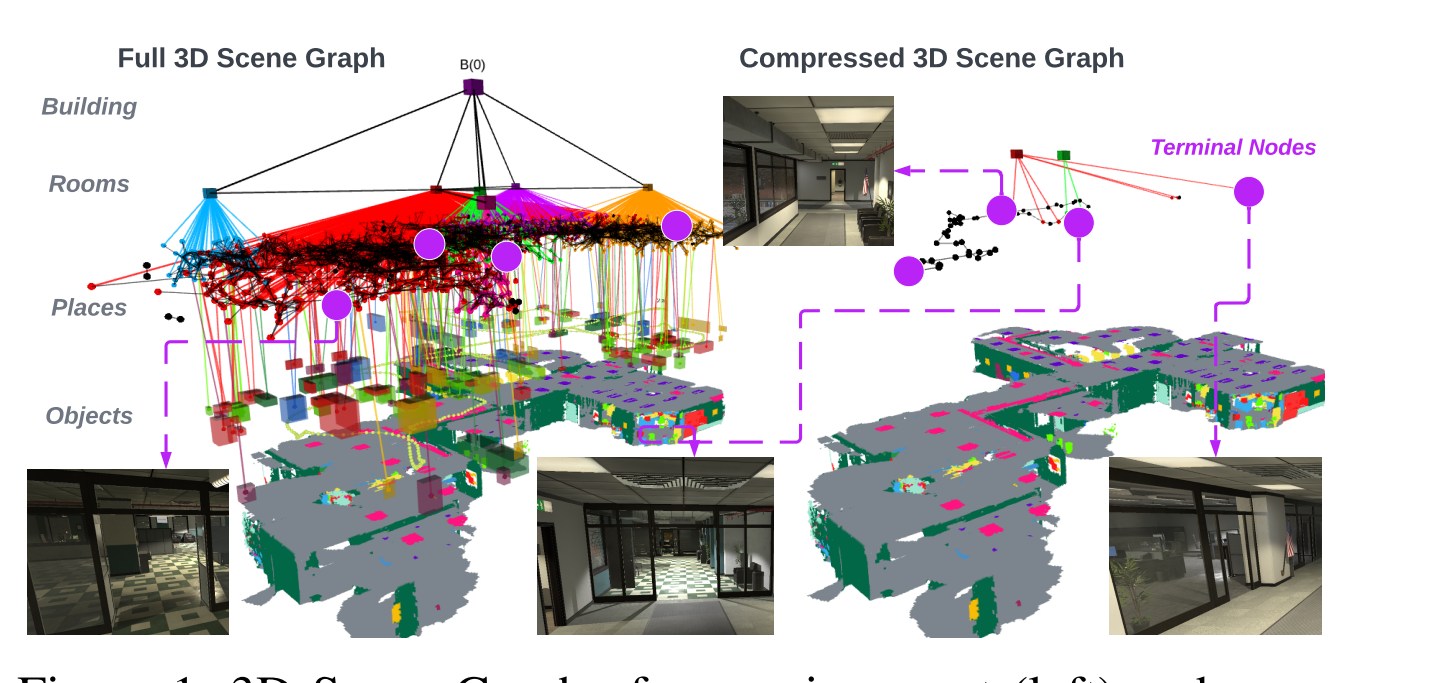
D-Lite: Navigation-Oriented Compression of 3D Scene Graphs under Communication Constraints
语义地图的数据压缩问题。
只保留图中最短路径的边,从而对模型进行压缩
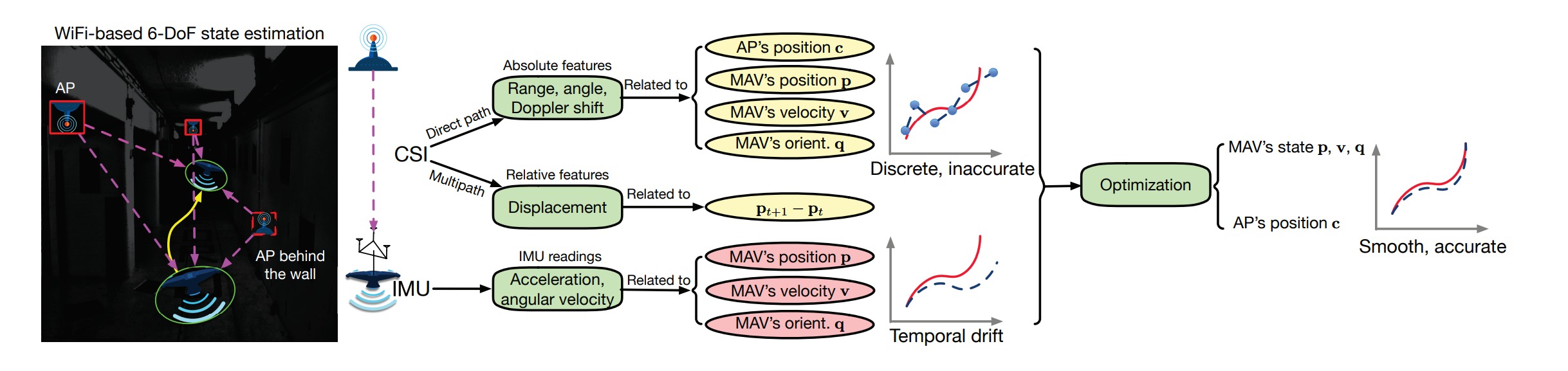
WiSion: Bolstering MAV 3D Indoor State Estimation by Embracing Multipath of WiFi
通过室内WIFI + IMU 进行无人机定位(经典吃瓜吃到自己家,场地用的是自己本科团队的)
实际上还是一个松耦合的融合,通过wifi和IMU分别计算位姿然后进行融合,IMU会飘、但是WIFI精度低,融合得到较好结果。
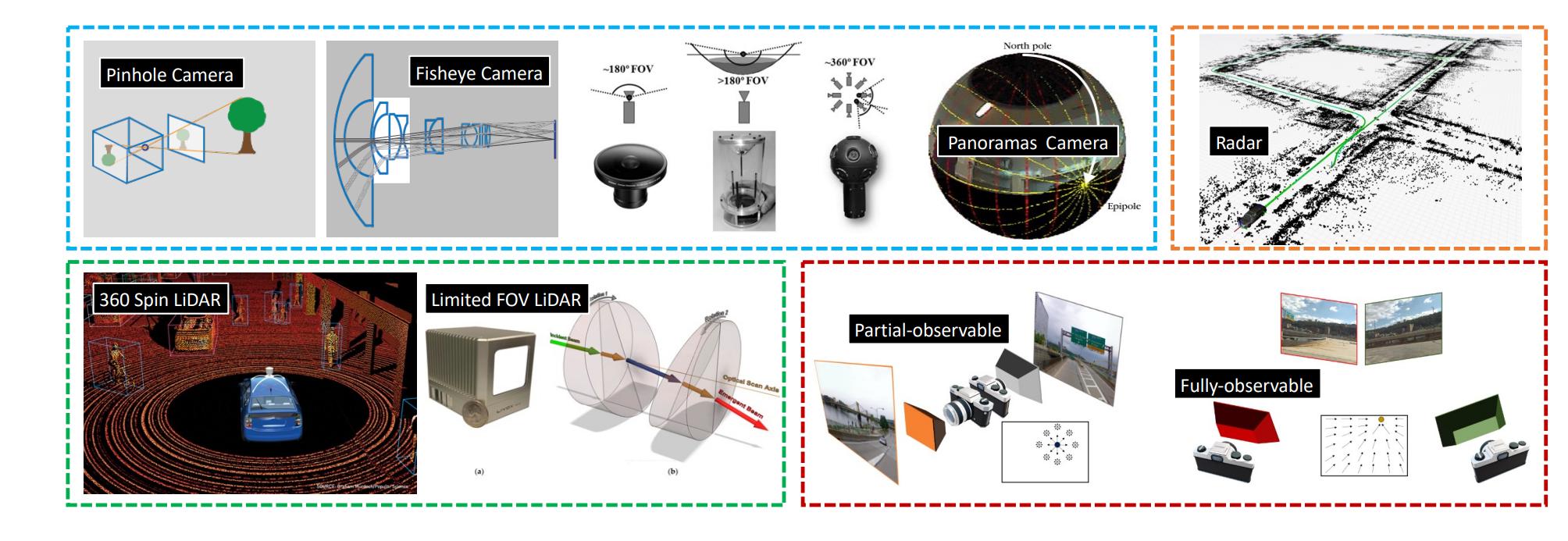
General Place Recognition Survey: Towards the Real-world Autonomy Age
场景识别综述,分为不同传感器对场景识别方法进行了概述
综述能发在T-Ro上的团队应该是很厉害的团队了。
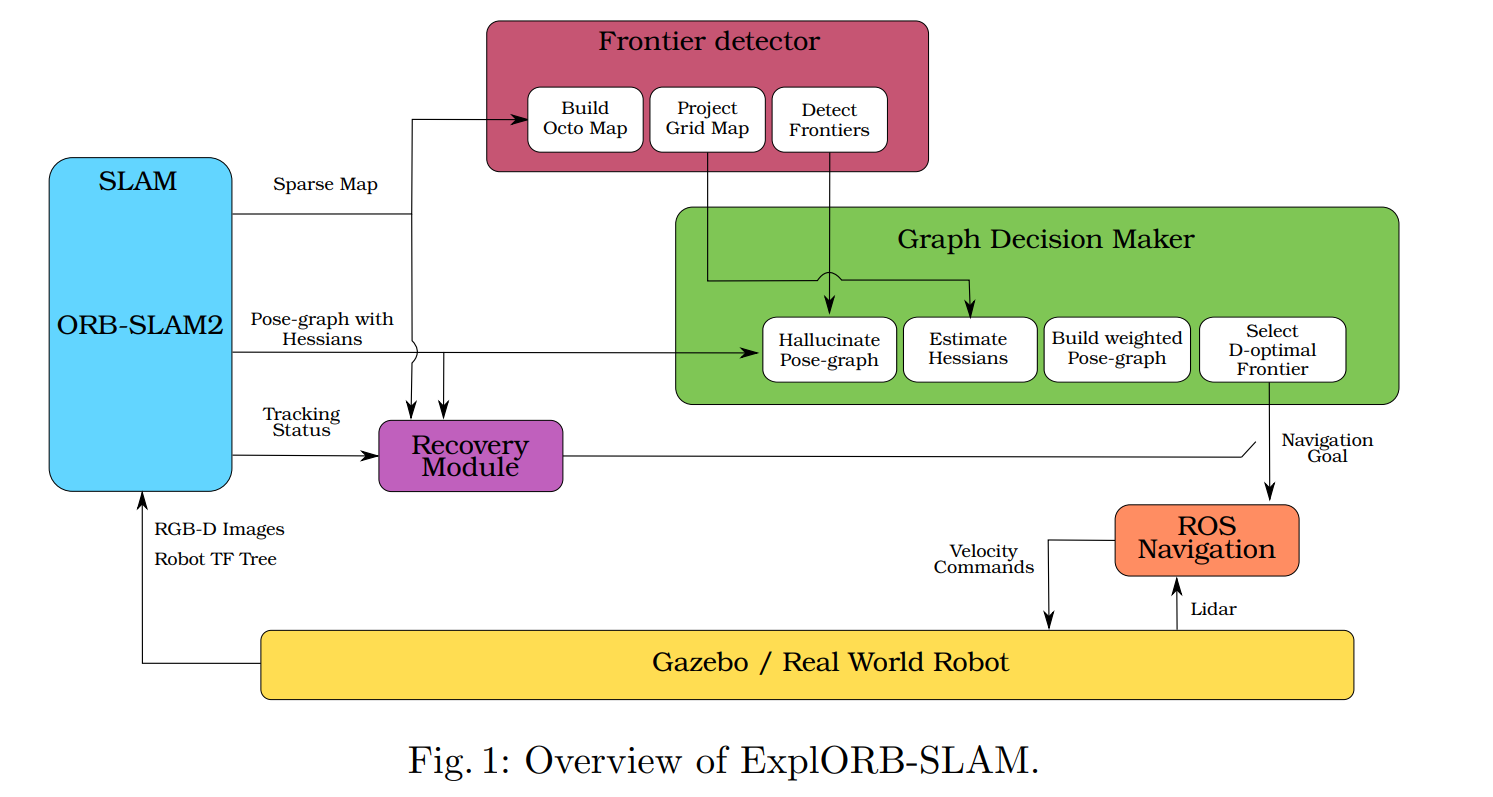
ExplORB-SLAM: Active Visual SLAM Exploiting the Pose-graph Topology
主动SLAM,利用ORB-SLAM提供的位姿图信息和稀疏地图信息,构建一个决策方法,从而使得机器人能够主动的探索整个空间构建地图。
Hilti-Oxford Dataset: A Millimetre-Accurate Benchmark for Simultaneous Localization and Mapping
具有挑战性环境下的新数据集,位姿真实值精度达到mm级。
E-NeRF: Neural Radiance Fields from a Moving Event Camera
事件相机和NeRF结合,在高动态环境下重建
Robust Incremental Smoothing and Mapping (riSAM)
iSAM 的升级版
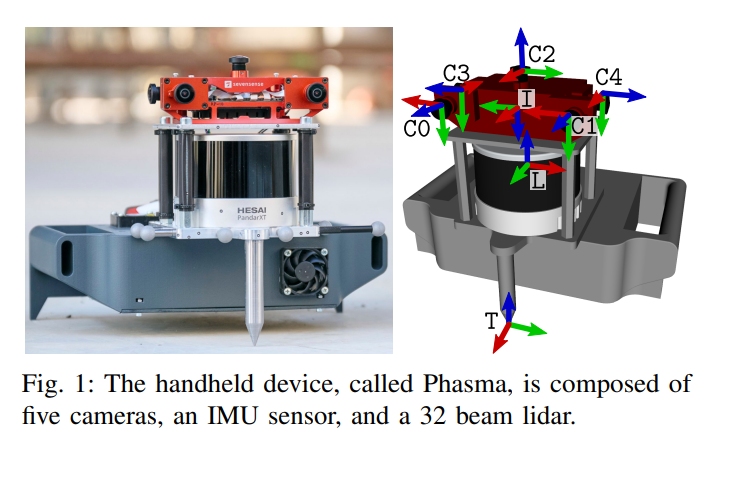
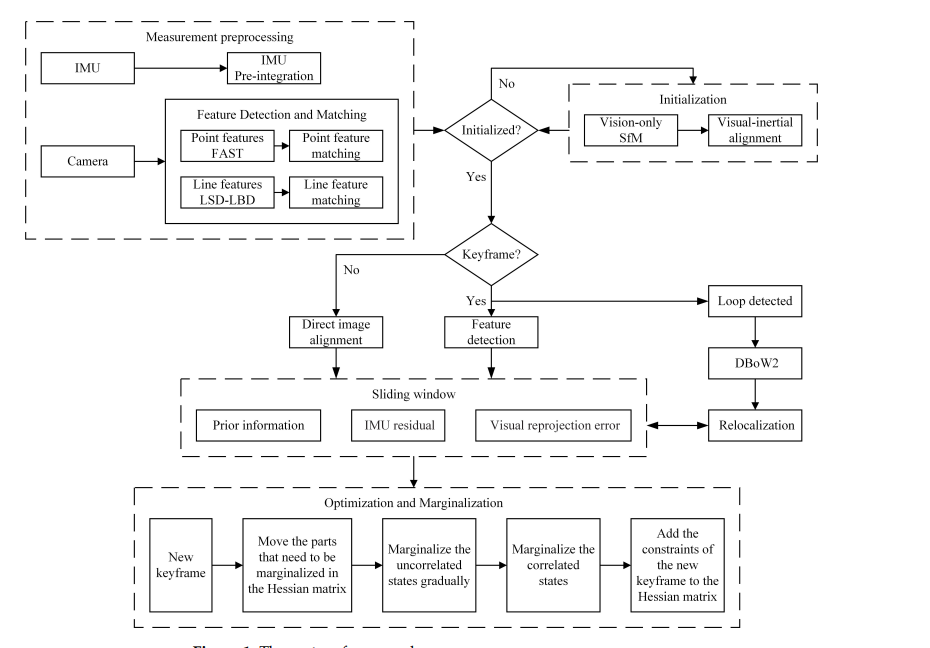
Semi-Direct Point-Line Visual Inertial Odometry for MAVs
融合怪类型的论文,在PL-VIO中添加,处理非关键帧就采用直接法去对齐而不提取特征,从而得到更高效的结果。
3D Reconstruction by Pretrained Features and Visual-Inertial Odometry
A Coupled Visual and Inertial Measurement Units Method for Locating and Mapping in Coal Mine Tunnel
PL-VIO 应用在隧道中的场景下
Deep Pose Graph-Matching-Based Loop Closure Detection for Semantic Visual SLAM
回环检测的一种很新颖的思路,将关键帧组成的位姿图进行匹配,回环检测变成了特征匹配问题去解决。
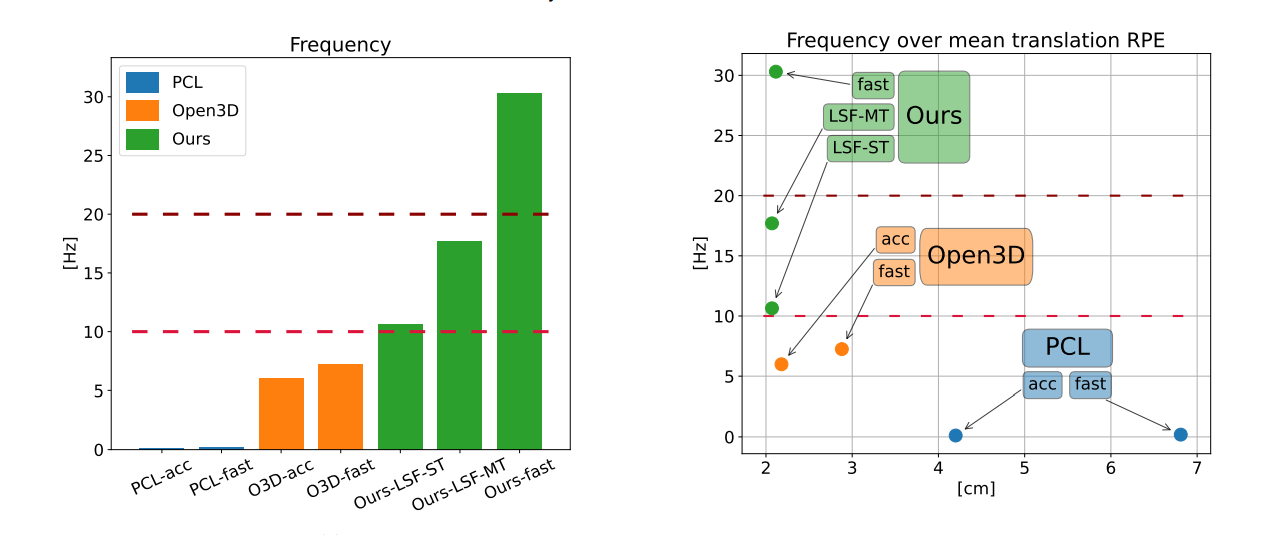
Efficient 3D Lidar Odometry Based on Planar Patches
ICP激光点云匹配的替代方案,利用平面特征中的共面约束
- 能够更快更好的完成任务
- 对场景是否有要求?
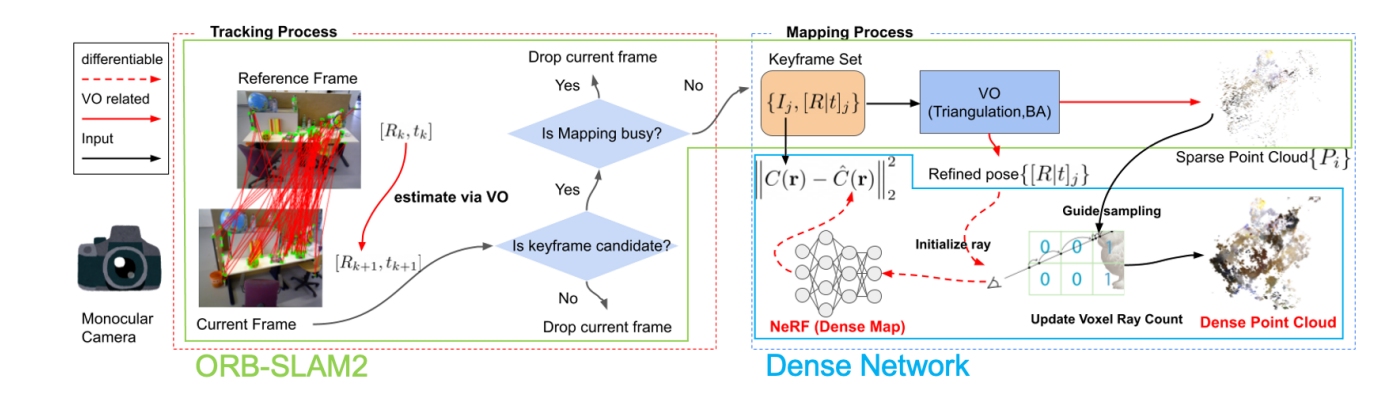
Orbeez-SLAM: A Real-time Monocular Visual SLAM with ORB Features and NeRF-realized Mapping
在ORB-SLAM基础上,添加NerF稠密地图构建模块。
利用了成熟ORB-SLAM框架以及算法提供的深度信息加速收敛过程,比单纯采用nerf的slam算法快几百倍。
- 速度快,能够在i7+3090下实时运行
- 精度高,由于采用传统方法估计的精度
- 收敛快,利用传统方法提供的深度信息加速收敛
- 是首个实时单目稠密地图的方法