目录
DHT11 温湿度传感器
产品概述
特点
检测模块是否存在
温湿度数据管理系统
uart.c文件
uart.h文件
lcd1602.c文件
lcd1602.H文件
dht11.c文件
dht11.h文件
delay.c文件
delay.h文件
config.h文件
main.c文件
DHT11 温湿度传感器
产品概述
DHT11数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器,应用领域:暖通
空调;汽车;消费品;气象站;湿度调节器;除湿器;家电;医疗;自动控制

特点
- 相对湿度和温度测量
- 全部校准,数字输出
- 长期稳定性
- 超长的信号传输距离:20米
- 超低能耗:休眠
- 4 引脚安装:可以买封装好的
- 完全互换 : 直接出结果,不用转化

数据传送逻辑
只有一根数据线DATA,上官一号发送序列指令给DHT11模块,模块一次完整的数据传输为40bit,高位先
出
数据格式
8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据+8bit校验和
通讯过程时序图
检测模块是否存在
根据如下时序图,做通信初始化,并检测模块是否存在,功能是否正常
时序逻辑分析a : dht = 1
b :dht = 0
延时30ms
c: dht = 1
在60us后读d点,如果d点是低电平(被模块拉低),说明模块存在!
代码实现
//检测模块是否接在设备上
#include "reg52.h"
#include "intrins.h"
sbit ledOne = P3^7;
sbit dht = P3^3;//模块的data插在p3.3void Delay30ms() //@11.0592MHz
{unsigned char i, j;i = 54;j = 199;do{while (--j);} while (--i);
}void Delay60us() //@11.0592MHz
{unsigned char i;i = 25;while (--i);
}void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}void check_DHT()
{//a : dht = 1dht = 1;//b :dht = 0dht = 0;//延时30msDelay30ms();//c: dht = 1dht = 1;//在60us后读d点,如果d点是低电平(被模块拉低),说明模块存在!Delay60us();if(dht == 0){ledOne = 0;//亮灯,说明模块存在}
}void main()
{ledOne = 1;Delay1000ms();Delay1000ms();check_DHT();while(1);
}
a : dht = 1
b :dht = 0
延时30ms
c: dht = 1
卡d点;while(dht1); 卡e点 while(!dht) 卡f点:while(dht) 卡g点:while(!dht) 有效数据都是高电
平,持续时间不一样,50us读,低电平0 高电平

DHT11传输0的时序分析

DHT11传输1的时序分析

温湿度数据管理系统
//接线:LCD1602数据选用P0口, RS接P1.0 RW接P1.1 EN接P1.4
//DHT11:数据线接P3.3口
#include "reg52.h"
#include "intrins.h"
sbit ledOne = P3^7;
sbit dht = P3^3;//模块的data插在p3.3
sbit fengshan = P1^6;
char datas[5];
sfr AUXR = 0x8E;
#define databuffer P0 //定义8位数据线,Po端口组
sbit RS = P1^0;
sbit RW = P1^1;
sbit EN = P1^4;
char temp[8];
char huma[8];
void check_busy()
{char tmp = 0x80;databuffer = 0x80;while(tmp & 0x80){//1000 0000RS = 0;RW = 1;EN = 0;_nop_();EN = 1;_nop_();_nop_();tmp = databuffer;EN = 0;_nop_();}
}
void Write_Cmd_Func(char cmd)
{check_busy();RS = 0;RW = 0;EN = 0;_nop_();databuffer = cmd;_nop_();EN = 1;_nop_();_nop_();EN = 0;_nop_();
}
void Write_Data_Func(char dataShow)
{check_busy();RS = 1;RW = 0;EN = 0;_nop_();databuffer = dataShow;_nop_();EN = 1;_nop_();_nop_();EN = 0;_nop_();
}
void Delay15ms() //@11.0592MHz
{unsigned char i, j;i = 27;j = 226;do{while (--j);} while (--i);
}
void Delay5ms() //@11.0592MHz
{unsigned char i, j;i = 9;j = 244;do{while (--j);} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{AUXR = 0x01;SCON = 0x40; //配置串口工作方式1,REN不使能接收TMOD &= 0xF0;TMOD |= 0x20;//定时器1工作方式位8位自动重装TH1 = 0xFD;TL1 = 0xFD;//9600波特率的初值TR1 = 1;//启动定时器
}
void sendByte(char data_msg)
{SBUF = data_msg;while(!TI);TI = 0;
}
void sendString(char* str)
{while( *str != '\0'){sendByte(*str);str++;}
}
void Delay30ms() //@11.0592MHz
{unsigned char i, j;i = 54;j = 199;do{while (--j);} while (--i);
}
void Delay60us() //@11.0592MHz
{unsigned char i;i = 25;while (--i);
}
void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}
void DHT11_Start()
{dht = 1;dht = 0;//延时30msDelay30ms();dht = 1;//卡d点;while(dht1); 卡e点 while(!dht) 卡f点:while(dht)while(dht);while(!dht);while(dht);
}
void Delay40us() //@11.0592MHz
{unsigned char i;_nop_();i = 15;while (--i);
}
void Read_Data_From_DHT()
{int i;//轮int j;//每一轮读多少次char tmp;//8bit01010110的数据char flag;DHT11_Start();for(i= 0;i < 5;i++){//8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据+8bit校验和//卡g点:while(!dht) 有效数据都是高电平,持续时间不一样,50us读,低电平0 高电平for(j=0;j<8;j++){while(!dht);//等待卡g点Delay40us();if(dht == 1){flag = 1;while(dht);}else{flag = 0;}tmp = tmp << 1;//每左移一次空一位tmp |= flag;//填补空的位置}datas[i] = tmp;}
}
void LCD1602_INIT()
{//(1)延时 15msDelay15ms();//(2)写指令 38H(不检测忙信号)Write_Cmd_Func(0x38);//(3)延时 5msDelay5ms();//(4)以后每次写指令,读/写数据操作均需要检测忙信号//(5)写指令 38H:显示模式设置Write_Cmd_Func(0x38);//(6)写指令 08H:显示关闭Write_Cmd_Func(0x08);//(7)写指令 01H:显示清屏Write_Cmd_Func(0x01);//(8)写指令 06H:显示光标移动设置Write_Cmd_Func(0x06);//(9)写指令 0CH:显示开及光标设置}Write_Cmd_Func(0x0c);
}
void LCD1602_showLine(char row, char col, char *string)
{switch(row){case 1:Write_Cmd_Func(0x80+col);while(*string){Write_Data_Func(*string);string++;}break;case 2:Write_Cmd_Func(0x80+0x40+col);while(*string){Write_Data_Func(*string);string++;}break;}
}
void Build_Datas()
{huma[0] = 'H';huma[1] = datas[0]/10 + 0x30;huma[2] = datas[0]%10 + 0x30;huma[3] = '.';huma[4] = datas[1]/10 + 0x30;huma[5] = datas[1]%10 + 0x30;huma[6] = '%';huma[7] = '\0';temp[0] = 'T';temp[1] = datas[2]/10 + 0x30;temp[2] = datas[2]%10 + 0x30;temp[3] = '.';temp[4] = datas[3]/10 + 0x30;temp[5] = datas[3]%10 + 0x30;temp[6] = 'C';temp[7] = '\0';
}
void main()
{Delay1000ms();UartInit();LCD1602_INIT();Delay1000ms();Delay1000ms();ledOne = 0;while(1){Delay1000ms();Read_Data_From_DHT();if(datas[2] > 24){fengshan = 0;}Build_Datas();sendString(huma);sendString("\r\n");sendString(temp);sendString("\r\n");LCD1602_showLine(1,2,huma);LCD1602_showLine(2,2,temp);}
}
代码太乱,为了解决使用了分文件来操作
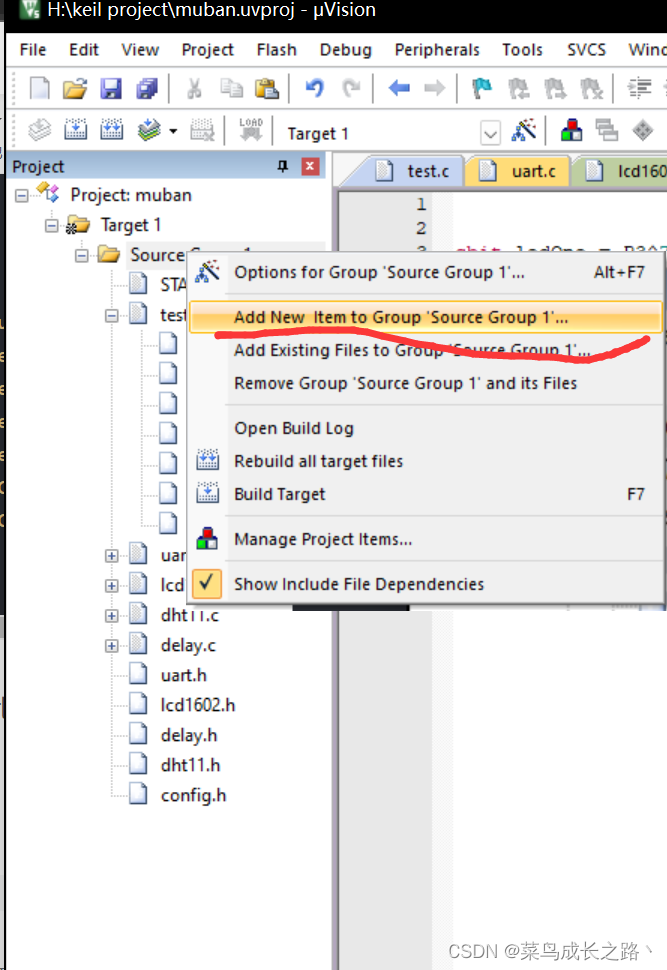
依次创建delay.c,delay.h,dht11.c,dht11.h,lcd1602.c,1cd1602.h,uart.c,uart.h等文件
uart.c文件
#include "reg52.h"
#include "config.h"
#include <string.h>sfr AUXR = 0x8E;
sbit D6 = P3^6;
char buffer[12];void UartInit(void) //9600bps@11.0592MHz
{AUXR = 0x01;SCON = 0x50; //配置串口工作方式1,REN使能接收TMOD &= 0xF0;TMOD |= 0x20;//定时器1工作方式位8位自动重装TH1 = 0xFD;TL1 = 0xFD;//9600波特率的初值TR1 = 1;//启动定时器EA = 1;//开启总中断ES = 1;//开启串口中断
}
void sendByte(char data_msg)//传一个字符
{SBUF = data_msg;while(!TI);TI = 0;
}void sendString(char* str)//传字符串
{while( *str != '\0'){sendByte(*str);str++;}
}void Uart_Handler() interrupt 4
{char tmp;char i;if(RI)//中断处理函数中,对于接收中断的响应{RI = 0;//清除接收中断标志位tmp = SBUF;if(tmp == ':'){i = 0;}buffer[i++] = tmp;if(buffer[0] == ':' && buffer[1] =='o' && buffer[2] == 'p'){fengshan = 0;memset(buffer,'\0',12);}if(buffer[0] == ':' && buffer[1] == 'c' && buffer[2] == 'l'){fengshan = 1;D6 = 0;Delay1000ms();Delay1000ms();memset(buffer,'\0',12);}}if(TI);
}
uart.h文件
void UartInit(void); //9600bps@11.0592MHzvoid sendByte(char data_msg);void sendString(char* str);
lcd1602.c文件
#include "reg52.h"
#include "intrins.h"
#include "delay.h"#define databuffer P0 //定义8位数据线,Po端口组
sbit RS = P1^0;
sbit RW = P1^1;
sbit EN = P1^4;void check_busy()
{char tmp = 0x80;databuffer = 0x80;while(tmp & 0x80){//1000 0000RS = 0;RW = 1;EN = 0;_nop_();EN = 1;_nop_();_nop_();tmp = databuffer;EN = 0;_nop_();}
}void Write_Cmd_Func(char cmd)//写指令
{check_busy();RS = 0;RW = 0;EN = 0;_nop_();databuffer = cmd;_nop_();EN = 1;_nop_();_nop_();EN = 0;_nop_();
}void Write_Data_Func(char dataShow)//写数据
{check_busy();RS = 1;RW = 0;EN = 0;_nop_();databuffer = dataShow;_nop_();EN = 1;_nop_();_nop_();EN = 0;_nop_();
}void LCD1602_INIT()
{//(1)延时 15msDelay15ms();
//(2)写指令 38H(不检测忙信号) Write_Cmd_Func(0x38);
//(3)延时 5msDelay5ms();
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
//(5)写指令 38H:显示模式设置Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}Write_Cmd_Func(0x0c);
}void LCD1602_showLine(char row, char col, char *string)
{switch(row){case 1:Write_Cmd_Func(0x80+col);while(*string){Write_Data_Func(*string);string++;}break;case 2:Write_Cmd_Func(0x80+0x40+col);while(*string){Write_Data_Func(*string);string++;}break;}
}
lcd1602.H文件
void LCD1602_INIT();void LCD1602_showLine(char row, char col, char *string);
dht11.c文件
#include "reg52.h"
#include "delay.h"sbit dht = P3^3;//模块的data插在p3.3char datas[5];void DHT11_Start()
{dht = 1;dht = 0;//延时30msDelay30ms();dht = 1;//卡d点;while(dht1); 卡e点 while(!dht) 卡f点:while(dht)while(dht);while(!dht);while(dht);
}void Read_Data_From_DHT()
{int i;//轮int j;//每一轮读多少次char tmp;char flag;DHT11_Start();for(i= 0;i < 5;i++){//卡g点:while(!dht) 有效数据都是高电平,持续时间不一样,50us读,低电平0 高电平for(j=0;j<8;j++){while(!dht);//等待卡g点Delay40us();if(dht == 1){flag = 1;while(dht);}else{flag = 0;} tmp = tmp << 1;tmp |= flag;}datas[i] = tmp;}}
dht11.h文件
void Read_Data_From_DHT();delay.c文件
#include "intrins.h"
void Delay30ms() //@11.0592MHz
{unsigned char i, j;i = 54;j = 199;do{while (--j);} while (--i);
}void Delay40us() //@11.0592MHz
{unsigned char i;_nop_();i = 15;while (--i);
}void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}void Delay15ms() //@11.0592MHz
{unsigned char i, j;i = 27;j = 226;do{while (--j);} while (--i);
}
void Delay5ms() //@11.0592MHz
{unsigned char i, j;i = 9;j = 244;do{while (--j);} while (--i);
}delay.h文件
#include "intrins.h"void Delay30ms(); //@11.0592MHzvoid Delay40us(); //@11.0592MHzvoid Delay1000ms(); //@11.0592MHzvoid Delay15ms(); //@11.0592MHzvoid Delay5ms(); //@11.0592MHz
config.h文件
sbit ledOne = P3^7;
sbit fengshan = P1^6;main.c文件
#include "reg52.h"
#include "intrins.h"
#include "delay.h"
#include "lcd1602.h"
#include "uart.h"
#include "dht11.h"
#include "config.h"char temp[8];
char huma[8];
extern char datas[5];void Build_Datas()//利用ascall码来转换数字,发现规律每次需加0x30
{huma[0] = 'H';huma[1] = datas[0]/10 + 0x30;huma[2] = datas[0]%10 + 0x30;huma[3] = '.';huma[4] = datas[1]/10 + 0x30;huma[5] = datas[1]%10 + 0x30;huma[6] = '%';huma[7] = '\0';temp[0] = 'T';temp[1] = datas[2]/10 + 0x30;temp[2] = datas[2]%10 + 0x30;temp[3] = '.';temp[4] = datas[3]/10 + 0x30;temp[5] = datas[3]%10 + 0x30;temp[6] = 'C';temp[7] = '\0';}void main()
{Delay1000ms();UartInit();//串口初始化LCD1602_INIT();//LCD1602初始化Delay1000ms();Delay1000ms();ledOne = 0;while(1){Delay1000ms();Read_Data_From_DHT(); if(datas[2] >= 24){fengshan = 0;}else{fengshan = 1;}Build_Datas();sendString(huma);sendString("\r\n");sendString(temp);sendString("\r\n");LCD1602_showLine(1,2,huma);LCD1602_showLine(2,2,temp);}
}