自动驾驶传感器:传感的本质

附赠自动驾驶学习资料和量产经验:链接
0. 前言
这个系列的背景是:工作时候需要攒一台数据采集车辆,那段时间需要熟悉感知硬件,写了不少笔记,都是些冗长的文章,感兴趣的收藏起来慢慢看。写的太多不保证准确性,发现硬性错误可以评论、私信。
文章目的是对自动驾驶车辆感知层的硬件进行介绍和分析。我希望能够从更本质的层面去将所有的自动驾驶传感器串联起来,从物理角度对传感器形成更加系统性的认识。
文章会尽力避免陷入“罗列传感器种类、品牌、参数、技术路线、优缺点” 的风格,而会专注于真正 “理解” 传感器,认识传感器所具备“优点”“缺点”背后的原理。
本文基于2022Q1的硬件产研情况,随着时间推移业界也会有新的进展,因此一些结论会随时间而变化。
另外,全文较长,可以跳跃看。涉及到的知识面比比较发散,但限于自身水平,并不会深入。一些概念可借助wikipedia、百度百科理解。
另外,我将本文的Radar和Lidar原理单独拆分出了两篇文章,便于精读和进行公式推导,这篇文章可以泛读。
1. 传感器的物理特性
1.1 汽车传感器的共同点
我们可能听了无数次,用于自动驾驶系统的传感器有:超声雷达、毫米波雷达、激光雷达、相机(可包含红外相机),同时GNSS-RTK模块、V2X通信也都可以视为特殊的传感器。
也无数次听到别人这些传感器的特性介绍:什么激光雷达精度高、毫米波雷达穿透性好、照相机能提供语义信息 bla bla bla。那么问题来了:这些传感器的共同点是什么? 或者说,这些传感器依靠何种方式来传递信息?造成这些传感器性能差异的原因又是什么?

奥迪A8的传感器布置
统一答案是:振动的传播——波的特性,这就是上述传感器的物理学本质。除了超声雷达依靠的是空气介质中机械波的传递,余下的传感器都是依靠电磁震荡产生的**电磁辐射(电磁波)**来传递信息。那么,我们先来复习一下电磁波。
1.2 传递信息的电磁波
电磁波(Electromagnetic wave) 是由同相且互相垂直的电场与磁场在空间中衍生发射的振荡粒子波,是以波动的形式传播的电磁场。其传播方向垂直于电场与磁场构成的平面。电磁波在真空中速率固定(光速不变原理,By Einstein,1905)。电磁波具有波粒二象性,其粒子形态称为光子——百度百科
1820年,丹麦科学家奥斯特发现了:随时间变化的电流能够产生变化的磁场;1832年,英国科学家法拉第又发现:变化的磁场又能够产生变化的电场。那么,人们自然联想到,电生磁-磁生电的过程可否循环交替进行呢?1865年,**麦克斯韦预言了这种电磁波的存在;**最终由德国科学家赫兹在1888年证明其存在。(从此Maxwell能够位列仙班,与牛爵爷同属人类历史第一梯队的物理学家)
而电磁波产生的原理,正如同人们所猜想的那样:电生磁-磁生电,并沿着垂直于电磁和磁场构成平面的方向传播。如此优秀的特性几乎是为了传递信息而设。

电磁波的定义
电磁波的 频谱 中包含了 频率从低到高的电磁辐射,有长波(<300kHz)、 短波(3-30MHz)、微波(300MHz-300GHz)、红外线(0.3THz~380THz)、可见光(380~750THz)、紫外线、X射线、γ射线(>10^18Hz,现有理论只能支撑大于“普朗克长度”的波长)。

电磁波频谱,可见光只占很小的部分
这也就意味着,美军用于 与万公里外海底潜艇通信的76Hz 长波雷达,拍摄胸片的高频X光,以及人眼所及的可见光本质上都是电磁波,其物质体现都是光子,区别仅是 波长 或 频率。

长波雷达、可见光、与X光片
回顾高中知识,波长  ,其中 c 是光速,f 为频率。这也就意味着频率越高,电磁波的波长越短,在环境传播中产生的衍射也也更少。如此会带来三个结果:
,其中 c 是光速,f 为频率。这也就意味着频率越高,电磁波的波长越短,在环境传播中产生的衍射也也更少。如此会带来三个结果:
-
波的传播越趋于直线,其误差更小,定位相对精确;
-
电磁波更容易被物体阻挡,环境中的传播距离更短;
-
频率更高,传输信息的效率也越高,包含能量也越高。
一个非常直观的例子就是,5G比4G传输效率更高,但需要建设更多的基站,单体基站的能耗也更高。以上三个结果基本可以解释所有传感器的差异。
1.3 车用传感器波长的选择
电磁波自第二次工业革命来,就被广泛的应用于信息的传输与接收。不例外的是,自动驾驶所用的传感器同样是利用了电磁波,其不同点在于收发电磁波的工作频段不同。
那么,在作为信号载体的电磁波波长范围应当如何选择? 先从需求端出发:自动驾驶车辆需要对 ~300m内的环境要素进行感知,关键的 ROI 感知分辨率应当达到厘米级。其次,车辆本身的定位精度也需要达到厘米级。
对于电磁波,波长越长,其探测精度和分辨率也就越低。而且,物理天线的大小同电磁波的波长成正比(一般为λ / 4)。我们更不能指望自动驾驶汽车扛着一个好几米的传感器前进。因此,波长的下限也就基本被限制在毫米波。
当然,频率的上限也不能一直提高,根据电磁波的能量公式:  ,紫外波段之后的电磁波对人体的伤害会大幅提高,制造成本也会大幅提高。且制约于**扫描技术(机械扫描、电子扫描)**的短板,目前的技术水平并不能发挥其物理极限。
,紫外波段之后的电磁波对人体的伤害会大幅提高,制造成本也会大幅提高。且制约于**扫描技术(机械扫描、电子扫描)**的短板,目前的技术水平并不能发挥其物理极限。
而且,更短的波长使其更容易被大气中的悬浮物阻挡,探测距离变得更短。这一点在激光雷达、相机上已经有所体现,微米级的PM2.5浮尘、雾天的水汽足以阻挡波长数百纳米的可见光和红外激光。相对地,毫米波则可以轻松绕开这些障碍。这也就是“相机、激光雷达在恶劣天气无法工作” 的本质原因,不以技术提高为转移。

局座:雾霾可以抵挡激光武器
可以说:并非自动驾驶汽车主动选择了毫米波雷达、激光雷达、相机等传感器。而是汽车的 感知需求 与 电磁波的物理特性,使得这些选择成为了必然。
接下来就可以分别讨论 自动驾驶用到的各种传感器。
参考资料:
Electromagnetic radiation - Wikipedia电磁波_百度百科 (baidu.com)James Clerk Maxwell - WikipediaSelf-driving car - Wikipedia普朗克长度_百度百科 (baidu.com)
2. 毫米波雷达 Millimeter Wave Radar原理
Radar是 Radio detection and ranging 的简称,即**“无线电探测和测距”。常用车规级雷达频率为24GHz和77GHz,对应的波长为12mm、4mm**。为什么采用这两种频率,而不采用其他频率的毫米波?别瞎想,这不是因为什么特别的技术原因,纯粹就是因为频谱资源不够用。
电磁波的每一个频段都会按照规定,分配给特定的设备 or 行业,以防止设备信号之间的相互干扰。这个分配工作是由国际电信联盟_百度百科 (baidu.com)来制定。目前的频段分配十分的紧张,联想一下前几年各国对5G频段的争抢,就不难理解。而24GHZ和77GHz就是国际电信联盟专门划分给车用雷达的频段。
毫米波雷达技术已经相对成熟,特别在军事层面。当前制约车规级毫米波雷达的,主要是性能与体积、成本之间的平衡。
2.1 雷达基础原理
雷达的原理非常朴素易懂:对目标发射电磁波 > 接收反射回波信号 > 测量回波的时间、相位等信号 > 解算目标的距离、速度、角度信息。其衡量指标无非就是量程和分辨率。

雷达原理
2.1.1 天线
根据电磁波的产生机理,雷达首先需要一个能够产生高频交变电流的装置,这部分用到压控震荡装置(VCO,voltage-controlled oscillator),输出的震荡频率会随着输入电压而改变(简单类比、回想大学《数字电路》中的555震荡电路)
然后利用发射天线将高频电流转化为向空间发射的电磁波。接收天线与发射天线是互逆的,天线同样可以将空间中的电磁波转化为交变的电信号。

天线产生电磁波的原理
2.1.2 距离测量:脉冲与FMCW
- 脉冲雷达
距离测量的方式很容易想到,雷达发射一个脉冲,测量脉冲信号从发射到返回的“飞行时间Time of Flight”即可得到。
- 调频连续波
当然,实际上车用雷达并不用这种方式,而是采用 “调频连续波FMCW——Frequency Modulated Continuous Wave”。雷达发射的频率呈线性变化,其回波信号也呈线性变化,通过测量当前发射频率与接受频率之差,可得到探测物体的距离,具体的公式推导后面会给到。

连续调频脉冲测距原理
2.1.3 速度测量:多普勒效应
雷达速度测量基于多普勒原理(Christian Johann Doppler,Austria,1842)。简而言之:观测者向着波源运动时,波被压缩,观测到的频率变高;观测者背离博源运动时,波被拉长,观测到的频率变低。

多普勒原理
速度引起的频率偏移是:  ,依据频率偏移即可计算出目标的相对运动速度。
,依据频率偏移即可计算出目标的相对运动速度。
2.1.4 角度测量:大锅盖 vs MIMO
衡量角度测量的一个重要指标是角分辨率,即两个最小可辨目标之间张角的大小。例如,雷达横向角分辨率为1°,则代表在100m范围内,雷达的“像素”大小为1.74m。如果这时有相邻的两个0.5m的目标,雷达是无法识别的。
自动驾驶要求尽可能高的角分辨率,该怎么办?一个简单的想法是,让发射的电磁波波束尽可能窄,方向性高。此时雷达地角分辨率就是电磁波的波束宽度,配合扫描机构即可实现一定范围内的视场角。激光雷达就是这个原理。
然而,这对于普通雷达是极为困难的。一个简单的点源天线的辐射波形,是趋近于球面波的,我们需要对天线进行设计,才能使其波瓣宽度减小(天线增益大,传播距离也远)。一般天线的波束宽度为: θ≈λ� ,其中D为天线口径。**天线物理尺寸越大,雷达波束指向性才越强。**且天线是无法达到如激光一样 高度一致的方向性的。(激光原理文章后面会提到)。

定向天线辐射示意图,孔径越大,方向性越好
汽车显然不可能顶着一个大锅盖扫描雷达行驶。事实上,车用雷达往往采用的都是贴片天线(CMOS技术),其成本更低、体积更小,其波束宽度基本都在30-60°之间。通过限制波束宽度来测角的方案,自然破产了。

“大锅盖”机械扫描雷达

车用雷达的贴片天线与波束宽度
那么,如何通过有限的设备获得较高的角分辨率?工程上最朴素的想法就是,采用多套设备换个位置多测几次,然后通过接收信号的差异解算角度(解算过程在后面)。这也就是MIMO(Multi-input Multi output)技术的核心思想,结合了MIMO + FMCW的雷达也是车用毫米被雷达的最主流的方案。
2.2 FMCW 汽车雷达的原理
此部分内容涉及理论+公式推导,主要来源 为TI手册,不感兴趣可以不看。
基础概念:
射频 Radio Frequency——负责接收及发射高频信号
中频 Intermediate Frequency——射频与基频的桥梁,使信号由高频信号转成基频
基带 Baseband——负责信号处理及储存等功能
2.2.1 调频连续波的测距原理
如前面所言,雷达发射的调频信号的频率在其持续时间Tc内呈线性关系。其主要参数有:信号带宽B、斜率S、持续时间Tc。
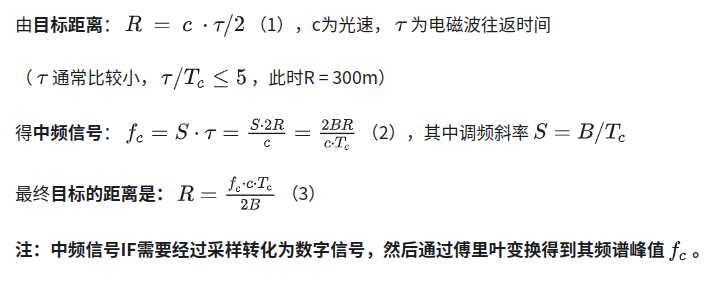
· 目标的距离解算

连续调频脉冲测距原理
那么,雷达发射信号与回波信号进行混频,得到其差值,就是一个**特定频率中频信号IF。**该信号的频率与目标距离成正比。将该IF信号由ADC模块采样后转换成数字信号,即可解算获得距离信息。

· 多个目标的检测
如视场内有多个目标,接收器会接收到多个反射波,中频信号IF则是由多个正弦波叠加而成。此时的做法也很简单,只要对该叠加的IF进行傅里叶变换,从信号的频谱即可得到多个频率峰值,进而计算多个目标的距离。

接收到的多个中频信号
· 探测距离范围
制约探测距离的因素主要是ADC采样频率。根据奈奎斯特采样定理: “在AD转换过程中,采样频率大于信号中最高频率2倍时,采样后的数字信号完整地保留了原始信号中的信息(一般用2.56~4倍)”。也因此,中频信号 �� 的上限,也就是可探测距离的上限,主要受ADC硬件的限制。
**注意:该探测距离是雷达的理论值。**实际工作中,探测距离会受到设备输出功率、天线增益、目标雷达横截面等参数影响。从式(3)还可看出,调频波持续时间  越短,相应的探测距离变小,但探测的周期也会缩短。
越短,相应的探测距离变小,但探测的周期也会缩短。

Fourier变换原理,by Heinrich(知乎)
· 距离分辨率
距离分辨率是雷达辨别多个物体的能力,当两个物体靠近到一定程度,雷达就无法识别出这是两个物体。体现在雷达信号上,就是两个中频信号的频率相差很小,傅里叶变换无法将两个频率的峰值区分开。

“融合”与“可识别”的峰值
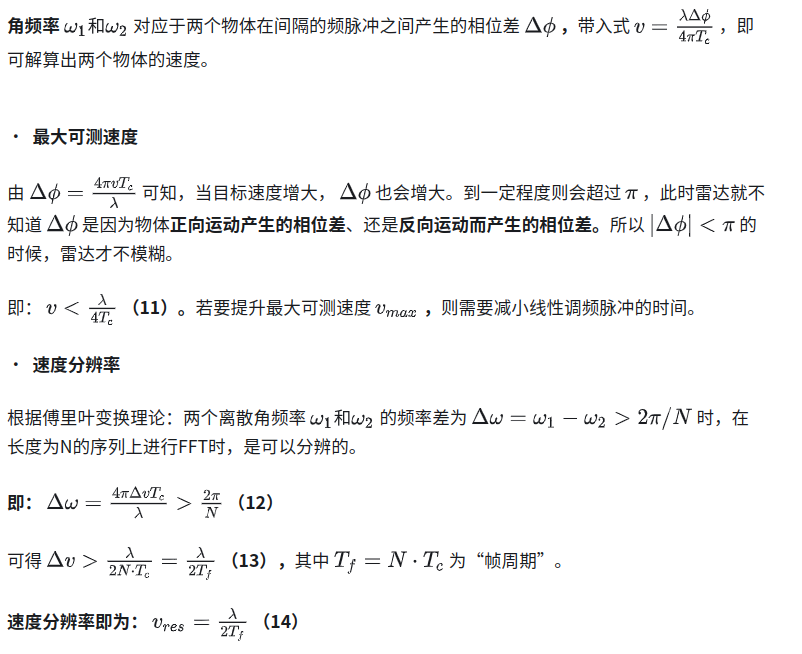
2.2.2 测速原理
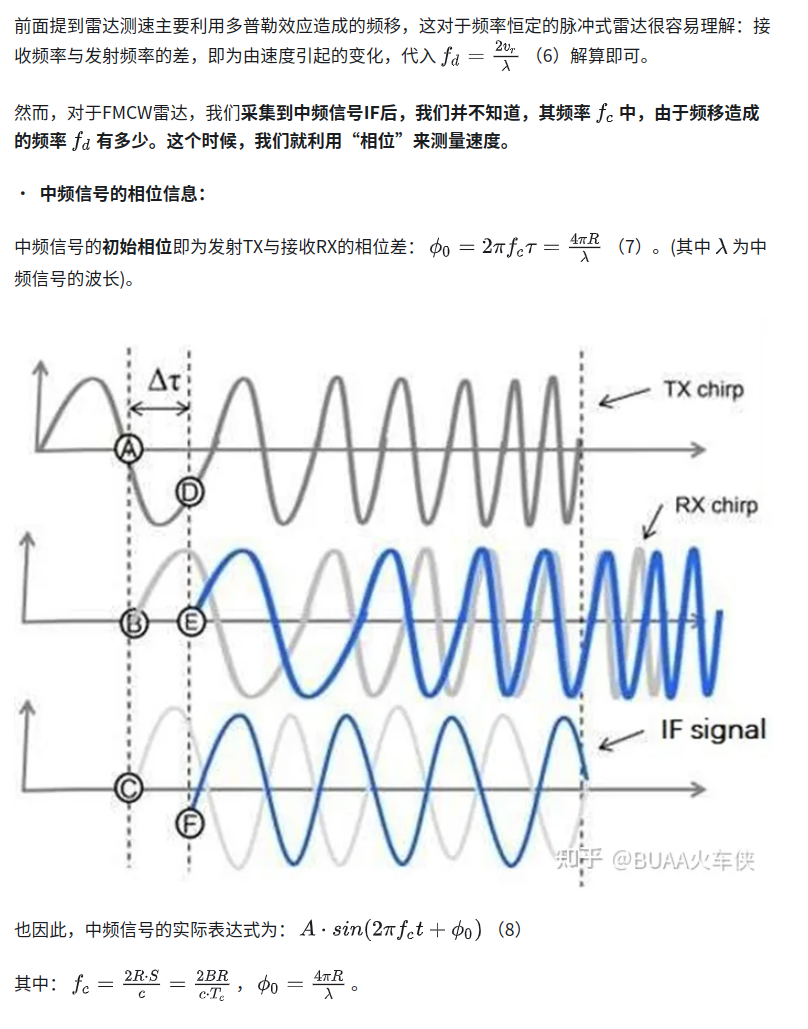
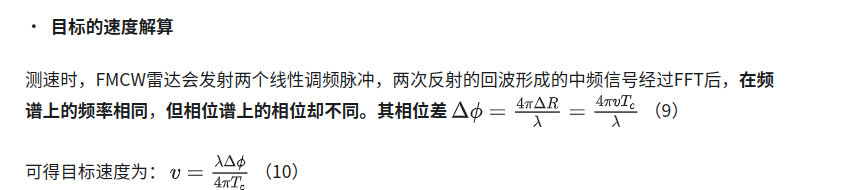

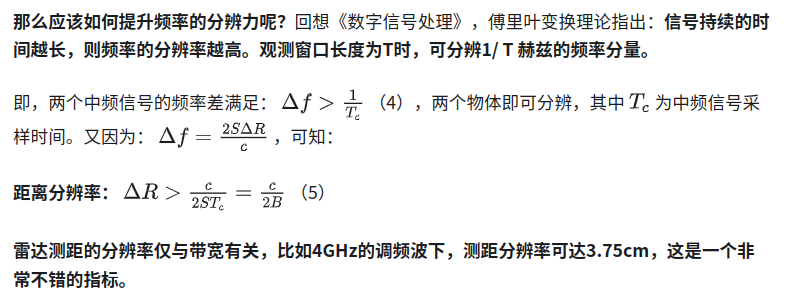
测速利用的相位差
- 目标的速度解算
当雷达视场内 速度不同的多个物体与雷达的距离相同时候,前面提到的双线性调频脉冲就失效了。FFT的相位谱的峰值混合叠加了多个物体的信号,无法分辨。
比如,当前有两个同位置的物体。此时,雷达需要发射一组N个(N>2)、等间隔的线性调频脉冲,称之为脉冲帧。

脉冲帧
在一个脉冲帧内的数据,可以产生N个频域相同的峰值,但N个峰值的相位却不同,叠加了两个物体的相位成分(下图的红色、蓝色箭头)。

那么如何将**“叠加的相位”** 拆开?对N个相位数据再做一次FFT。

相位数据的FFT结果,区分两个物体的相位
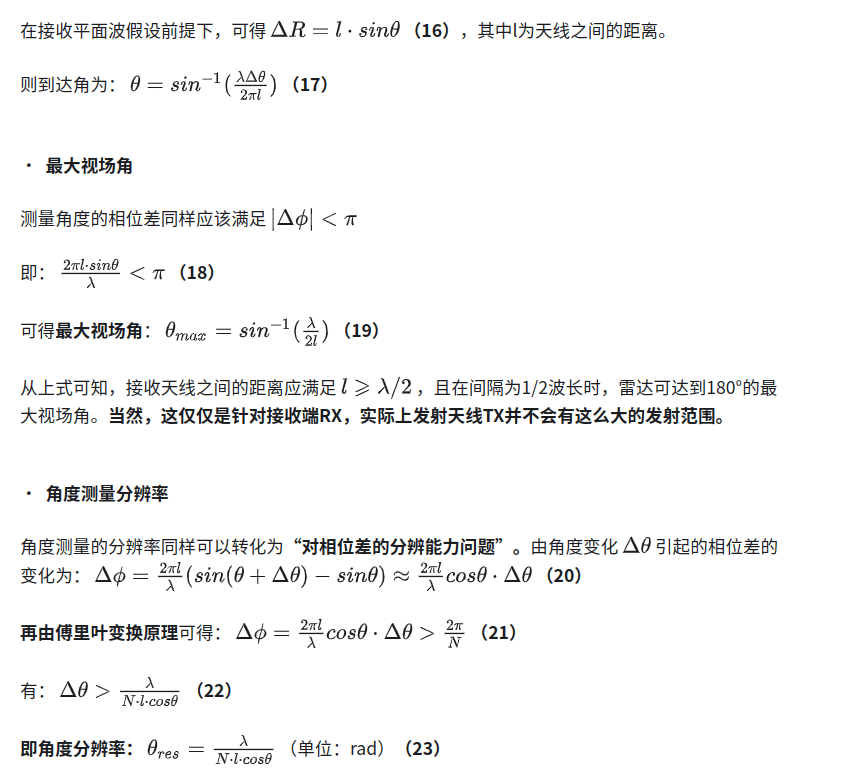
2.2.3 测角原理
- 目标的角度解算
前面说过,车用雷达测角需要两个以上的RX天线,单发单收是无法实现角度估计的。其原理是:物体与两个天线的距离差  会导致FFT峰值的相位变化。
会导致FFT峰值的相位变化。

两个天线


平面波假设
2.3 MIMO技术
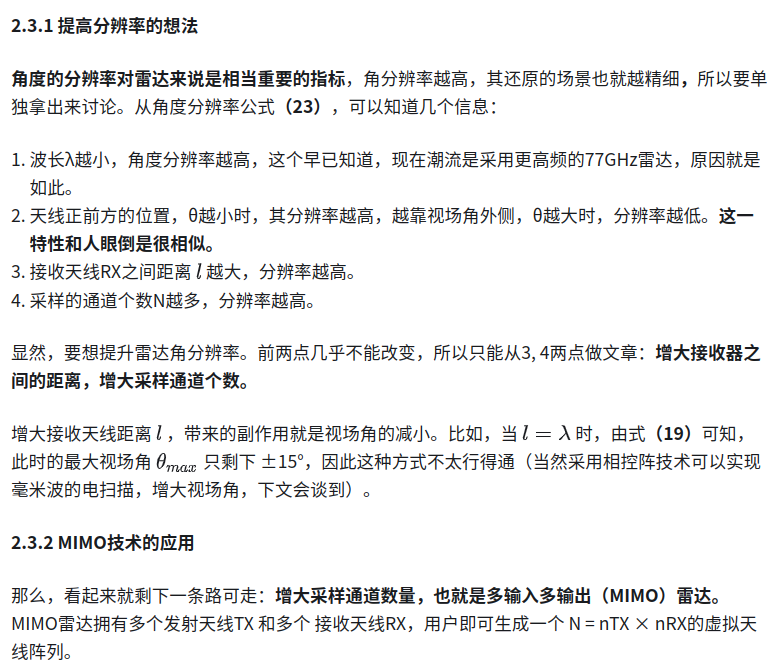
2.3.2 MIMO技术的应用
那么,看起来就剩下一条路可走:**增大采样通道数量,也就是多输入多输出(MIMO)雷达。**MIMO雷达拥有多个发射天线TX 和多个 接收天线RX,用户即可生成一个 N = nTX × nRX的虚拟天线阵列。

MIMO技术的应用
- 增加接收天线RX
以单发4收为例,此时N = 4。后面的每一个天线相对于前面一个,多了一个相移ω,呈线性增加。通过对N个天线的信号进行采样,可以形成相位信号序列的FFT。接收天线越多,角度的峰值就越尖锐,ω的分辨率越高。

角度分辨率随RX增多而提升
应用MIMO雷达技术,可以倍增虚拟天线的数量,相应地也提高了角度分辨力。MIMO 雷达的原理,可以扩展到多维阵列。
- 增加接收天线RX
每增加一个RX天线,都要配备独立的RX处理链(各配有一个LNA、混合器、IF滤波器和ADC),显然一直增多RX天线并非好的做法,增加发射天线是更高效的方式。M个天线发射相互正交的信号,多波形信号在空间保持独立。N个接收天线采用M个匹配滤波器对回波进行匹配,从而可以得到M*N个通道的回波数据。


多个TX
相应地,RX天线上接收TX2发射信号的相位为[4ω 5ω 6ω 7ω]。2发4收的雷达通道数N = 8,与单发8收的雷达等效。
当然,由于不同TX发射的信号为正交信号,因此无法像相控阵雷达那样,通过波束形成在空间功率合成,单个发射波束的主瓣增益将降低1/M。
2.4 电扫描:相控阵技术
2.4.1 相控阵原理:电磁波的干涉
对军事感兴趣的应该常听一个概念**“相控阵雷达”(Phased Array Radar,PAR)**。所谓相控阵雷达,同样用到了多个单元,类似昆虫的复眼,每个单元都可以单独收发电磁波。

军用相控阵雷达
当这些独立的单元同时向外发射电磁波时,就会发生干涉现象。使得某一方向的电磁波加强,或使得某一方向的电磁波相互抵消。所谓“相控阵”,就是对每一个发射单元的相位进行控制,使发射波在空间进行功率合成,从而形成特定方向的电磁波。
通过改变发射阵列中的相位,生成的波束即可对空间扫描,而不需要旋转雷达本体。此时,雷达的视场(FOV)就与天线的波束宽度没有直接关系了。

相控阵原理:波的干涉
2.4.1 PAR与MIMO的区别
虽然同是基于多天线阵元结构的雷达系统,相控阵与MIMO是有明显区别的。首先相控阵的阵元间距通常是波长量级的,为了防止出现栅瓣,通常间距设置为 �/2 。通过调节移相器,可以获得预期方向的窄波束。
而MIMO雷达的天线发射阵元间距并没未特别限定,可以是密集或稀疏的,更大的区别是MIMO是发射正交波形,且可以自由选择波形。其合成发射方向图的可控自由度远大于相控阵雷达。这种波形的分散、集合,使得MIMO雷达比一般相控阵雷达具有更好的性能。
MIMO雷达通过采用稀疏布阵,可得到最大的连续虚拟孔径,提高空域分辨率,在测角方面具有较强的优势。
也因此,事实上车用雷达一般多采用FMCW+ MIMO技术,很少采用PAR。
2.5 Radar的尴尬现状
毫米波雷达能够作为主流的自动驾驶传感器之一,具备了两个不可替代性:
1. 相比LiDAR,Camera,毫米波雷达具有可以测量目标的相对速度。(实际上激光雷达也可以办到,但车用LiDAR侧重并不在此)
2. 恶劣天气中,Radar是唯一能够有效感知环境的传感器。
但当前,毫米波雷达仍然面临比较尴尬的现状。2021年7月,Tesla在最新的 FSD Beta V9中取消了毫米波雷达,仅采用视觉+超声的感知方案。毫米波雷达价格谈不上昂贵,Tesla出于降本的动机应该不大。
主要是因为,毫米波雷达在实际应用层面存在一些问题,当前主流车用毫米波雷达没有高程信息。以TI的AWR1843为例,其天线设计为3发4收,布置在水平面上。

德州仪器 AWR1843
所有高度的物体反射波都被投影到了垂直平面。这意味着:如果前方有一个路牌or 龙门架,毫米波雷达会反馈前方有障碍物,但并不能确定“障碍”是在空中还是在路面。
如此一来,**关于静态物体的探测结果的可置信度就大大降低。**因此,实际应用中,**工程师往往将毫米波雷达检测到的静态目标进行滤波,只保留动态目标的追踪结果,**这也就是盛传的“毫米波无法检测静态物体”说法的来源。其实不是不能检测,而是由于高程的不确定而舍弃掉了。
这就带来一个很大的隐患,如Tesla在山景城、嘉义市的事故,都是撞上了白色的集装箱车辆。首先,毫米波雷达必定检测到了前方的静态障碍,但被系统过滤掉了。对着白色的集装箱,Camera又无法获得足够的特征对其进行识别,Tesla又没有LiDAR能够探测距离,于是——卒。

Tesla的事故
一些做自动驾驶决策的工程师表示,目前的毫米波雷达数据的确非常难以融合,信息量相对较少,数据质量还往往不高,颇似鸡肋。

Masking by Moving: Learning Distraction-Free Radar Odometry from Pose Information - YouTube
2.6 4D 毫米波雷达
2.6.1 4D毫米波雷达原理
毫米波雷达难用的一大重要原因就是:不具备高程信息。人们自然联想到:**在垂直方向上也布置收发天线,给它加上高程信息不就行了?**如此一来,路面的静态物体就不会被漏掉了。但其难点在于,天线在垂直与水平方向天线紧密排布会相互产生严重的信号干扰。

水平+垂直方向的收发,From Arbe Phoenix
自然也有厂商做出了这方面的努力,开发了**4D FMCW MIMO High Resolution Radar,即所谓的“4D毫米波雷达”。**4D指的是3D的坐标信息+速度信息。Conti(ARS540),TI,华为,以色列的Vayyar,Arbe等公司都发布了4D毫米波雷达产品。其原理不外乎采用MIMO继续增多收发天线的阵列。
比如华为在2021年发布了12TX,24RX的4D成像雷达(未量产)。业界跳的比较欢的,当属Arbe的旗舰产品Phoenix,具备了48发,48收,一共2300个信道,性能远超一般的3发4收的现行产品。Arbe宣称其产品具备:1°的横向角分辨率和2°的纵向角分辨率,100°的水平视角和30°的垂直视角,2K点云,其成本能控制在150USD以内。

Arbe 4D毫米波雷达技术参数
下方是Arbe于2020年底给出的产品测试Demo。
Arbe: Radar Revolution. Delivered. - YouTube
从视频中可以发现,尽管其3D点云和仍然很难称之为“密集”,但已经可以对行人、车辆做出追踪;对垂直方向上的龙门架、立交路面做出精确判断。其数据与Camera,LiDAR的可融合性大大提升。
Arbe甚至吹嘘其产品可以挤占激光雷达的市场,吹牛博眼球的成分较大。**由于雷达的发射原理,以及毫米波物理极限的限制,**4D毫米波雷达不大可能形成足够密集的点云,其信息丰富度不足以独立支撑自动驾驶车辆。
更何况,基于FMCW技术的4D激光雷达目前也在研发中,其同样能够提供速度数据,文章的后面会提到。同样如果能够成功的话,也会挤占毫米波雷达的生存空间。
另一家以色列的公司RFIsee,则开发出了基于相控阵技术的4D雷达。
RFISee Radar Output 2 1 - YouTube
2.6.2 2022.07.26 长安深蓝SL03 森斯泰克
2022.07.25日,长安深蓝发布的第一款增程混动车型SL03是中国第一款搭载4D毫米波雷达的车型,供应商为国内厂家森思泰克,其可在水平120°、纵向30°的视场中提供1.2°水平 x 2.5°纵向的角分辨率,即一帧包含1200个点。

长安深蓝SL03

森思泰克4D成像雷达效果
对毫米波雷达的讨论篇幅极长,但这是有必要的。其中,对FMCW、多普勒效应、MIMO、相控阵的原理解释,也有助于理解后续的内容。
疑问:
A. 雷达天线应当如何设计才能减小波瓣宽度,是否有简单通俗的举例?
B. 思考:脉冲毫米波雷达因为何种原因存在盲区、模糊?为何FMCW的激光雷达不存在盲区?
(原因:1、方向分辨率差异;2、脉冲重复频率(PRF))
3. 激光雷达 LiDAR原理
激光雷达Lidar 是Light detection and ranging的简称,即**“激光探测和测距”**,其工作模式同样是 **发射-反射-接收-计算,**当然各个环节上同Radar的实现方式不大一样。
几年前第一次听到 “激光雷达” 的概念时候,我的第一印象并非极富科技感的3D点云,而是想起小时候被人用激光电棒晃眼睛的恐惧,进而联想到汽车顶着一个大号激光电筒把我晃瞎的情形。事实上,车用LiDAR的激光波长属于处于人眼看不到的红外线波段。(但这也不代表红外线对人类眼睛无害,尤其是接近可见光的905nm激光,需要对其功率做出限制)

LiDAR点云
***注:**对于激光雷达的介绍,太多文章互相抄来抄去,而对于底层的原理分析并不透彻。并且总是从投资者的角度出发,过多关注企业的经营状况和投资意见。而作为自动驾驶的从业者,追踪厂家的产销情况是没有多少意义的,这些信息总会随着时间流逝而不断变化。我们只需要知道当前激光雷达工作的最基本的原理:
-
原子的受激辐射原理;(根本的物理学原理)
-
EEL、VSCEL、光纤激光器的原理;(激光发生器件的基础原理)
-
PD、APD、SPAD、SiPM原理;(激光接受器件的基础原理)
-
机械式、棱镜、转镜、MEMS、OPA相控阵、FLASH;(让激光完成扫描的原理)
-
ToF、FMCW的测距原理;(激光测距的原理)
所谓市面上的激光雷达,无非就是以上技术原理的排列组合而已。熟悉于原理才能一眼看透背后的本质,后面也就不会迷失在一些报告的胡吹乱侃中。

激光雷达的可行技术路线
3.1 LiDAR的基础物理学原理
3.1.1 原子能级与自发辐射
前面提到,雷达发射的电磁波,本质上是由交变电流转化而来。而到了光波,人类目前并没有能力制造数百THz的交变电流从而产生电磁波,此时就需要借助原子来产生光波。
再次将视角切回高中,丹麦物理学家玻尔提出了原子的能级结构:即原子只能处于一系列不连续的能量状态中,而不能处于中间的状态,原子不同能量状态对应于 电子不同的运行轨道(1s 2s 2p 3s 3p 3d …)。

光子、电子轰击、外部加热等作用下,原子会从低能级跃迁到高能级(激发态),而激发态原子又会自发的向更稳定的低能级跃迁,此时能量会以光子的形式发射出来。在此过程中,不同原子产生的自发辐射光在频率、相位、偏振方向及传播方向都有一定的任意性,我们称之为自发辐射(spontaneous emission)。
这其实就是我们日常生活中白炽灯、节能灯管、LED灯的发光原理。例如节能灯管就是电子轰击汞原子,汞原子产生紫外线,紫外线照射荧光物质最终产生可见光。

汞原子能级
3.1.2 受激辐射与激光
还另一种更有规律的辐射方式:受激辐射(Stimulated emission)。当激发态原子处在外来电磁辐射场的作用下,而这个外来光子的能量恰好又是原子两能级的能量差。这个时候,会引起类似“雪崩”的效应,众多激发态原子发出的光子的频率、相位、传播方向、偏振状态与外来光子完全相同。
此理论由爱因斯坦在1917年在《关于辐射的量子理论》中发表。

激光就是 Light Amplification by Stimulated Emission of Radiation (受激辐射光扩大)的简称。而后受激辐射会经过一个谐振腔。基础的谐振腔由两片平行的反射镜构成,一片为全反射,另一片部分反射。那么,其结果是:方向不沿轴线的激光会被滤除,而沿轴线的激光则会被加强。向外输出的就是 波长一致、方向一致、波束极窄的光——激光。

谐振腔原理
这种一致性是极其宝贵和罕见的,普通雷达天线发射的电磁波无论如何都做不到在方向上的高度一致。而激光具备的方向性和波束宽度,使激光雷达的角分辨率可以暴打其他传感方式。
3.1.3 激光器件的种类
至于车用激光器的种类,大概有以下三种:
- 边缘发射激光器(Edge Emitting Laser,EEL ):
发射功率大,"纺锤状"光斑。
**2. 垂直腔表面发射激光器(Cavity Surface Emitting Laser,VCSEL ):**发射光束窄且圆,**易于实现芯片上的大规模阵列(十分重要)。**缺点:当前器件功率略低,探测距离短。单轴转镜雷达以及Flash激光雷达都会采用VCSEL,这将会是未来的主要方向。
比如,Iphone搭载了VCSEL激光雷达,Face ID即基于激光雷达的人脸扫描识别。2022新上市的禾赛AT128同样采用了128个集成的VCSEL激光器。
3. 光纤激光器

EEL vs VCSEL
- 905nm激光与1550nm激光
激光的波长很大程度上与激光器自身的物理性质相关(还与环境温度等参数相关)。比如,硅激光器中心频率为905nm,磷化铟激光器中心频率为1550nm。
显然,相对于905nm激光,1550nm激光的绕行能力相对好一点,对空气中的尘埃颗粒有一定克制作用。远离了可见光范围,其激光器的功率也能做的更大一些,探测距离也相对更长,可达到500m。1550nm激光雷达是一个大的趋势,不过磷化铟激光器和砷化镓APD也比硅激光器更贵些,不过这并不是什么大问题。
水对于1550nm激光的吸收作用非常强,对人眼伤害小也是因为在到达视网膜前被眼球中的水分吸收了。因此雨天里1550nm的激光雷达受影响较大。
REF:
Vertical-cavity surface-emitting laser - WikipediaLaser diode - Wikipedia
3.1.4 激光接收器件原理
- 光电二极管
那么问题又来了:**激光又应该如何感知呢?**前面提到Radar的接收器利用了天线的互逆性质,将电磁波转化为同频率的交变电流信号。然而,该方法对激光是无法实现的。我们需要新的方法转换激光信息:光电效应。
在高于某特定频率的电磁波(该频率称为极限频率Threshold frequency)照射下,某些物质内部的电子吸收能量后逸出而形成电流,即光生电。
光电现象由德国物理学家赫兹于1887年发现,而正确的解释由爱因斯坦提出,闭环了属于是,爱因斯坦也因此于1922年获得诺贝尔奖。

又是我!
光电二极管在设计和制作时尽量使PN结的面积相对较大,以便接收入射光。光电二极管是在反向电压作用下工作的,有光照时,反向电流迅速增大到几十微安,称为光电流。光的强度越大,反向电流也越大。光的变化引起光电二极管电流变化,这就可以把光信号转换成电信号,成为光电传感器件。
其响应度可以定义为给定波长下,产生的光电流(I)和入射光功率§之比: �(�)=���� (26)
对入射功率的线性响应,可以为后续的AMCW测距提供良好保障。

硅光电二极管
具体到激光雷达,一般采用的器件是雪崩光电二极管(APD)、单光子雪崩二极管(SPAD)、硅光电倍增管**(SiPM),**器件具体的原理参考WIKIPEDIA,本文不做详细阐述。
- 激光的混频与干涉
光电二极管能够探测到的信息有:激光的有/ 无,强/ 弱。如需测量激光的频率和相位等信息,则需要激光干涉仪以或者光谱仪。这在激光雷达上是不现实的。因此,实际上FMCW激光雷达会采用间接测量的方式,通过入射-接收激光混频的方式的到频率、相位信息。
Ref:
Photoelectric effect - WikipediaPhotodiode - WikipediaAvalanche photodiode - Wikipedia
3.2 车用激光雷达需求
在自动驾驶行业,车载激光雷达的应用场景主要是自动驾驶开发验证、Robotaxi、高精地图采集、以及量产车型的感知模块。其中,尤以量产项目能够带来大量的订单,为厂商创造大量利润。而量产车型的激光雷达,其要求同样也是最为苛刻的:汽车作为“用户”,到底想要什么样的激光雷达:
| 要求 | 说明 |
|---|---|
| 成本可控 | 作为汽车的零部件,其成本不能太高,至少控制在几百美元内; |
| 体积小 | 体积不能太大,便于在车身上的布置; |
| 测量距离可达200m以上 | 自动驾驶合理的探测范围需求; |
| 精度可达厘米级 | 同上; |
| 测量响应快,时间短 | 只有单点探测速度足够快,才能形成足够密的点云 |
| 对人眼安全(硬性) | 法规硬性要求,激光能量不能过高,否则对人眼产生伤害; |
| 满足车规级要求(硬性) | 满足车规级的13000小时的工作寿命需求,以及-40-85°C的工作温度要求,需要可靠性极高; |

激光雷达的需求
可见,激光雷达需求的维度是比较高的,事实上同时达成这些需求也非常困难。带着这些需求,去讨论现有的LiDAR的方案,这样就不会迷失在 罗列参数、优缺点 的陷阱中。
3.3 激光雷达的测距方案
激光雷达的方案分为两种:**“测距方案”与“扫描方案”,**两者有一定的关联性,但却是不同的概念,不能混淆。因此分开讨论。
3.2.2 TOF测距法:时间测量
3.2.3 三角测距:Camera传感
激光发射器发射激光,打在物体上的反射光被CMOS或CCD传感器捕获,传感器可以是线阵相机or面阵相机。采集到的光斑图像,可以利用灰度质心法可求得sub-pixel级别的分辨力。(双目视觉其实也可归结为是三角测距)

三角测距原理:斜射式

三角测距优点:
-
近距离下的探测精度很高
-
CCD传感器的成本要比TOF的雪崩光电二极管(APD)、硅光电倍增管(SiPM)要低很多,是最便宜的激光测距方案。
但其缺点也很明显:

鉴于其特点,三角测距在室内近距离测距场景下比较常用,比如扫地机器人。在自动驾驶领域基本被弃用。
3.2.4 AMCW测距:相位测量(iToF)
AMCW即连续波强度调制(Amplitude modulated continuous wawe)。通过调整激光器的输入功率(电流),调整发射光强度,从而对发射激光的振幅进行周期性的调制。通过求解发射波与接受波之间的相位差来反推ToF,因此这种方案也被称为iToF(indirect ToF)。注意:该“相位”指的是周期性调整激光振幅的相位,也就是控制激光的交变电流的相位,而非激光本身的相位。

AMCW测距法

由于测量振幅相位比直接测量ToF更加容易,AMCW测距方式精度更高,主流的激光测距仪,其原理就是AMCW测距。显然,根据傅里叶变换原理,对激光振幅相位的采集需要一定的采样时间,其测距速度相较ToF会慢一个数量级。若用机械扫描的方式,其帧率会极慢。
恰好,AMCW测距比较方便实现固态**Flash LiDAR,(为什么适合后面会讲到)。**但问题又来了,AMCW由于发射连续光波。其功率很大,对人眼存在很大的安全隐患,较难通过车规认证。
其实,深度相机同样广泛采用AMCW测距,其将近红外(NIR)频谱中的调制光投射到场景中,并记录光线的返回时间,生成一组深度图。
3.2.5 FMCW测距法
厂商:Aeva、Mobileye & Intel、Blackmore、光勺、洛微等
激光FMCW的测距原理同第二章FMCW Radar的测距原理完全相同,在此不做叙述。
其优点在于:
-
FMCW的精度可以达到毫米级;
-
利用多普勒效应可以解算目标的速度信息;
-
FMCW信噪比极高,具有极强的抗干扰能力;
-
平均功率很小(比现行ToF更小),对人眼安全;
-
探测距离远,可达600m;
-
易与光学相控阵OPA结合,实现纯固态激光雷达(后面会叙述)
其缺点在于:
-
对激光的线性调频、光学混频技术比毫米波困难许多,即便研发完成,也是成本最高的方案。
-
FMCW的单次测距需要20us,点云形成速率为:50000point/ s,**点云密度先天不足(方案硬伤)。**相比之下,TOF仅需要不到2us即可完成测量。
3.2.6 测距方案的讨论
汇总四种测距方法的特性,结果很明显,**当前能通过市场考验的也只有TOF。**三角测距、FMCW都存在硬伤,未来很难有大的发展。**而FMCW具有很大的潜力,**是当前的业界的研究热点。
| 方法 | 成本 | 速度 | 量程 | 寿命 | 安全 | 精度 | 体积 | 备注 |
|---|---|---|---|---|---|---|---|---|
| TOF | ✔中 | ✔最快 | ✔较大 | ✔ | ✔ | ✔中等 | ✔ | 当前主流方案 |
| 三角 | ✔最低 | ✔最快 | ❌最小 | ✔ | ✔ | ❌差 | ✔ | 远处精度太差 |
| AMCW | ✔较低 | ❌较慢 | ✔较大 | ✔ | ❌ | ✔高 | ✔ | 很难满足安全 |
| FMCW | ❌最高 | ❌较慢 | ✔最大 | ✔ | ✔最好 | ✔高 | ✔ | 未来方向之一 |
Ref:
相干探测_百度百科 (baidu.com)激光接收系统_百度百科 (baidu.com)光学混频_百度百科 (baidu.com)
3.3 激光雷达的扫描形式
测距方案都是针对单点的检测,只有配合扫描方法,才能实现大视角范围内的探测。LiDAR的扫描形式可以分为机械,混合固态,纯固态三种。其中:
-
**机械:**由机械旋转机构驱动激光收发器件进行旋转,从而完成对FOV的测量;
-
**混合固态:**激光收发器件静止,通过转镜、棱镜、MEMS振镜的运动改变激光反射角度,完成对FOV扫描;
-
**纯固态:**利用相控阵技术使激光发射方向改变完成扫描,或利用Flash技术直接探测;
再次提醒:扫描方式 和 测距方法 完全是两种分类依据,不能混为一谈。下面也会给出每种扫描形式可配合使用的测距方法。
3.3.1 机械扫描:一维转台
**常用测距方法:**TOF
**代表厂商:**Velodyne、Ouster、Waymo、禾赛、速腾聚创、镭神智能、北科天绘
以Velodyne 64线激光雷达为例,其将64个激光器垂直堆叠在一起。然后使其连续旋转,完成360°的环境测量。旋转机构在机械学上可称为:“转台”。

Velodyne机械式激光雷达
| 优点 | 1. 转速稳定,扫描线性,视角360°; 2. 当前所有Lidar中,精度最高、点云最稠密(128线,双回波可达691万点/秒); |
|---|---|
| 缺点 | 1. 包含多套收发模块,成本极高;动辄数十万; 机械转台需要满足:较小的重量、体积、极高的角精度、可承受20Hz的高速旋转。这对于机械设计和加工、伺服电机的运动控制都有着极大的挑战。这导致了: 2. 体积大,重量大,可靠性差,平均失效时间只有1000-3000小时,需要频繁的维护保养,难以达到车规级最低13000小时的要求。 3. 内含较多可动部件,在行车环境下磨损严重、需要大量人工组装调教,规模化量产困难 |
因此,在自动驾驶研发、高精地图建图的过程中,对成本不敏感的采集车还是会采用性能最高的传统机械式雷达,但将其落地到量产车型就完全不现实。随着其他种类雷达的性能提升,该种雷达会逐渐式微。
3.3.2 半固态1:转镜式
**常用测距方法:**TOF
**供应商:**华为、速腾聚创、Luminar、大疆Livox、禾赛(几乎所有厂商都有)
该种激光雷达的激光器固定不动,利用一面可以转动的镜子反射激光,从而实现在空间的扫描。其极大的缩小了机械式的体积。转镜的控制灵活度也要比伺服转台高很多。转镜又可以分为一维转镜、二维转镜、多面转镜、以及双棱镜等多种细分路线
3.3.2.1 一维转镜
顾名思义,一维转镜只能在一个维度实现旋转,如果需要实现面扫描就需要并排放置多个激光器,这和纯机械式雷达有点像。不过,车规级转镜雷达要实现较小的体积,则需要芯片化的VCSEL激光器。
案例:2022.06.21上市的理想L9搭载的禾赛AT128就是一维转镜雷达(这应该也是截至2022的第一款量产一维转镜雷达)。其VSCEL激光器也是苹果同家供应商Lumentum生产。禾赛采用了三镜面的方案,200rpm的低转速即可实现10Hz的扫描速度。其153万/秒的点频也是当前最强的半固态雷达。

理想L9

禾赛AT128一维转镜激光雷达
| 优点 | 1. 旋转自由度少,控制更简单,系统的精度、刚性更好; |
|---|---|
| 缺点 | 1. 多个激光器硬件成本更高,制造良品率低,且只有905nm的硅激光器能在芯片上实现VCSEL工艺,而磷化铟1550nm激光器目前无法实现; 2. 受限于功率,VCSEL探测距离相对受限; |
3.3.2.2 二维转镜
对应的,二维转镜可以利用一个激光器就完成对FOV的扫描:
| 优点 | 1. 这样做自然成本会低不少, 2. 控制灵活,可以对ROI进行增稠扫描; 3. 单激光头可以用光纤激光器,比VSCEL功率大,可探测距离远; |
|---|---|
| 缺点 | 1. 2维转镜复杂度高,刚性相对差,控制麻烦; 2. 出点数量极限比较低; |
3.3.2.3 Livox双棱镜
大疆Livox的方案比较与众不同,其采用了激光通信领域的旋转双棱镜方案。电机带动双棱镜高速旋转。激光在通过第一个楔形棱镜后发生第一次偏转,通过第二个楔形棱镜后发生第二次偏转,控制两面棱镜的相对转速便可以控制激光的扫描形态。产生不同角度的折射光线,从而实现对FOV的扫描。

Livox的棱镜方案 与 点云排布样式
| 优点 | 1. 和上述二维转镜差不多; |
|---|---|
| 缺点 | 1. 点云中心稠密,边缘稀疏; 2. 每次扫描成像的范围不一样,车辆高速移动中成像不连续; 3. 原理导致电机转速过高,6000rpm,影响寿命。 也因此,此款Lidar市场化情况不理想,只有小鹏P5安装了一些,Livox应该也在开发新的方案 |
- 2022市场化情况(目前可能有点过时,凑合看吧)
2021-2022年,是转镜式半固态激光雷达的大年,将会有大批车型搭载上市,这也是激光雷达的首次大规模的商用化落地。可预测,这会给汽车的辅助驾驶功能带来极大的提升。
| 华为 | Luminar-Iris | Livox-HAP 市场反馈不好 | Innovusion-Falcon | 禾赛AT128 2022最强转镜雷达 | |
|---|---|---|---|---|---|
| 激光光源 | 905nm | 1550nm | 905nm | 1550nm | 905nm |
| 扫描方式 | 转镜 | 双轴转镜 | 双棱镜(特殊) | 双轴转镜 | 单轴转镜 |
| 激光器数量 | ? | ? | 6 | 8 | 128VCSEL激光器 |
| 探测距离 | 150m@10%NIST | 250m@10%NIST | 150m@10%NIST | 250m@10%NIST | 200m@10%NIST |
| 精度 | cm | 2cm | |||
| 视场角 | 120°x25° | 120°x30° | 120°x25° | 120°x25° | 120°x25.4° |
| 角分辨率VH | 0.25°x0.26° | 0.06°x0.06° | 0.18°x0.23° | 0.05°x0.05° | 0.1°x0.2° |
| 帧率 | ? | ? | 20Hz | ? | 10Hz |
| 线数 | 等效96线 | 等效300线 | 等效144线 | 等效300线 | 真128 |
| 出点数/s | 45万 | 80-100万 | 153万 | ||
| 价格 | $1000(10万台) | ||||
| 搭载车型 | 极狐阿尔法 | R汽车ES33 | 小鹏P5 | 蔚来ET7 | 理想L9、集度、高合 |
2021-2022转镜激光雷达量产项目
Ref:
AT128 - 禾赛科技 (hesaitech.com)解读理想L9激光雷达,真·128线是怎么来的?【电动课堂28】_哔哩哔哩_bilibili
3.3.3 半固态2:MEMS
MEMS激光雷达是近年可以落地的第二个方案。其方案核心是:利用MEMS(Micro-Electro-Mechanical System)技术,将**“微振镜”、与传感控制电路**集成在一个硅半导体芯片上。极大的缩小体积与成本。

MEMS LiDAR的微振镜
- 扫描机构地柔性形变
似乎芯片上并没有旋转机构,这个反射镜是如何旋转的?实际上,转镜边缘细细的连接悬臂就是实现旋转的机构,在机械学上被称为:柔性铰链(Flexible Joint)。利用材料的弹性形变,能够在比较小的范围内输出非常精密的位移、旋转。同时还可以对驱动源的运动进行偏转、放大。
相比传统的机械结构,其优点是:响应速度极快、分辨率极高,可轻松输出纳米级分辨率的运动。

机械学概念:柔性铰链
但这种扫描机构需要克服的缺点有以下几个:
-
其运动输出有较强的非线性;
-
存在耦合运动(比如X轴的位移,会引起Y轴的位移);
-
可实现的偏转角度有限,形变过度则不可回复;
-
微机械结构过分脆弱,在恶劣工况下寿命有限;
所谓**“振镜”,**意味着其工作在谐振频率下,这时候还需要注意其输入功率不能过大,否则会因谐振而对器件产生损伤。
- 精密驱动技术
如此精密的机械结构,如何驱动?显然传统的伺服电机是不可能的,需要采用微驱动方法:比如**静电驱动(ES),电磁驱动(EM),电热驱动(ET)以及压电驱动(PE)**四种。
以笔者熟悉的**压电陶瓷(Piezoelectric Ceramics, PZT)**为例:回想一下打火机,大拇指按下去就有电流打出,这就是所谓“压电效应”;反之,给压电陶瓷两端通电之后,也会产生一个位移。这个位移的总行程不过几百微米,而分辨率则可以达到纳米级。
而压电驱动器同样存在令人恼火的**非线性。以压电陶瓷为例,其运动输出不会随电压升高而线性变化。而是具有“迟滞”和“蠕变”**的特性。“迟滞”的意思是:其升压曲线和降压曲线存在明显差异,甚至电压变化速率不同时候,升压曲线还会不一样。而“蠕变”的意思是,压电陶瓷的位移还会随着时间的变化而缓慢变化,即使其两端电压并没有改变。另外,外界温度、湿度、磁场、机械振动都会改变其输出特性。

压电陶瓷的迟滞、蠕变特性
- 需求:精密闭环控制
除了PZT之外,**其他的微驱动方式的输出非线性问题也比较严重。**到微观层面,机械系统的漂移也成为一个影响运动精度的重要因素。所谓“漂移”,指的是物体会随着时间推移产生微米级的运动漂移。这在宏观的机械系统上不算什么,但在微机电系统则是必须要消除的因素。
如此一来,微动系统需要 “高实时性” “高精度” 的精密闭环控制,对于当前的技术手段倒也不难实现。因此,MEMS LiDAR的商用被推上日程。
- 优缺点
优点将反射激光地“镜子”也集成在了芯片中,摆脱了宏的精密闭环控制,对于当前的技术手段不难实现。因此,MEMS LiDAR的商用被推上日程。射面积也大(接收功率大),其可测量的范围也就越远,但相应的微振镜的旋转角度范围越小,视场角很受限;
| 优点 | 将反射激光地“镜子”也集成在了芯片中,摆脱了宏观的机械运动装置,极大缩减了量产成本; 减小了硬件体积; |
|---|---|
| 缺点 | 微振镜的尺寸越大,其反射面积也大(接收功率大),其可测量的范围也就越远,但相应的微振镜的旋转角度范围越小,视场角很受限; 如果减小振镜尺寸,其转角范围大,视场角增大,但其反射面积变小,可测量范围不足; 振镜受外界温度、振动环境影响会导致谐振频率的变化,从而导致线束紊乱、成像歪曲; 硅基的MEMS柔性悬臂极其脆弱,其机械强度、抗老化性能都比较一般,影响到MEMS Lidar的寿命,总体鲁棒性不如转镜方案(2022Q2结论)。 |
| 优点 | 将反射激光地“镜子”也集成在了芯片中,摆脱了宏观的机械运动装置,极大缩减了量产成本; 减小了硬件体积; |
|---|---|
| 缺点 | 微振镜的尺寸越大,其反射面积也大(接收功率大),其可测量的范围也就越远,但相应的微振镜的旋转角度范围越小,视场角很受限; 如果减小振镜尺寸,其转角范围大,视场角增大,但其反射面积变小,可测量范围不足; 振镜受外界温度、振动环境影响会导致谐振频率的变化,从而导致线束紊乱、成像歪曲; 硅基的MEMS柔性悬臂极其脆弱,其机械强度、抗老化性能都比较一般,影响到MEMS Lidar的寿命,总体鲁棒性不如转镜方案(2022Q2结论)。 |
| 优点 | 将反射激光地“镜子”也集成在了芯片中,摆脱了宏观的机械运动装置,极大缩减了量产成本; 减小了硬件体积; |
|---|---|
| 缺点 | 微振镜的尺寸越大,其反射面积也大(接收功率大),其可测量的范围也就越远,但相应的微振镜的旋转角度范围越小,视场角很受限; 如果减小振镜尺寸,其转角范围大,视场角增大,但其反射面积变小,可测量范围不足; 振镜受外界温度、振动环境影响会导致谐振频率的变化,从而导致线束紊乱、成像歪曲; 硅基的MEMS柔性悬臂极其脆弱,其机械强度、抗老化性能都比较一般,影响到MEMS Lidar的寿命,总体鲁棒性不如转镜方案(2022Q2结论)。 |
| 优点 | 将反射激光地“镜子”也集成在了芯片中,摆脱了宏观的机械运动装置,极大缩减了量产成本; 减小了硬件体积; |
|---|---|
| 缺点 | 微振镜的尺寸越大,其反射面积也大(接收功率大),其可测量的范围也就越远,但相应的微振镜的旋转角度范围越小,视场角很受限; 如果减小振镜尺寸,其转角范围大,视场角增大,但其反射面积变小,可测量范围不足; 振镜受外界温度、振动环境影响会导致谐振频率的变化,从而导致线束紊乱、成像歪曲; 硅基的MEMS柔性悬臂极其脆弱,其机械强度、抗老化性能都比较一般,影响到MEMS Lidar的寿命,总体鲁棒性不如转镜方案(2022Q2结论)。 |
| 优点 | 1. 将反射激光地“镜子”也集成在了芯片中,摆脱了宏观的机械运动装置,极大缩减了量产成本; 2. 减小了硬件体积; |
|---|---|
| 缺点 | 1. 微振镜的尺寸越大,其反射面积也大(接收功率大),其可测量的范围也就越远,但相应的微振镜的旋转角度范围越小,视场角很受限; 2. 如果减小振镜尺寸,其转角范围大,视场角增大,但其反射面积变小,可测量范围不足; 3. 振镜受外界温度、振动环境影响会导致谐振频率的变化,从而导致线束紊乱、成像歪曲; 4. 硅基MEMS柔性悬臂极其脆弱,其机械强度、抗老化性能都比较一般,影响到MEMS Lidar的寿命,理论上总体鲁棒性不如转镜方案(2022Q2结论)。 |
- MEMS激光雷达量产项目案例(2022.06)
当前(2022年Q2)情况,MEMS激光雷达处于量产前夕,主要是速腾聚创的M1激光雷达,已经拿下多家OEM的采购定点。其性能参数与转镜雷达差不多。(小鹏也投资了速腾聚创)
| 速腾聚创-M1 | 一径科技ML-30S 中距 | 一径科技ML-30S 长距 | Innoviz One | Innoviz Two | |
|---|---|---|---|---|---|
| 价格 | OEM报价4K-5K | ||||
| 激光光源 | 905nm | 1550nm | 1550 | 905nm | 905nm |
| 激光器数量 | 5个 | ||||
| 探测距离 | 150m@10%NIST | 250m@10%NIST | 300m@10%NIST | ||
| 精度 | 5cm(1σ) | ||||
| 视场角 | 120°x25° | 140°x70° | 115°*25° | 125°*40° | |
| 角分辨率 | 0.2°x0.2° | 0.5° | 0.1° | 0.1° * 0.1° | 0.07° * 0.05° |
| 帧率 | 10-20Hz | 5-20 | |||
| 分辨率 | 等效125线(600x 125) | 等效160线 | |||
| 出点数 | 75万/s | ||||
| 价格 | $1898,大规模$500 | ||||
| 搭载车型 | 小鹏G9 上汽、广汽、 北汽、威马、Lutos | 无OEM定点 元戎robotaxi | 无OEM定点 元戎robotaxi | 宝马inext | 研发中 |
- 等效线数的解释:
“等效XXX线”是常见于MEMS激光雷达和二维转镜激光雷达的一种宣传。比如我们会看到“等效300线”的宣传,这会给人一种:“比几十万的128线机械雷达线数更多” 的感觉。实际上这种说法是厂家耍的一点小聪明。
MEMS激光雷达和二维转镜激光雷达往往只有一个或者几个激光器,然后搭配二维扫描机构实现对FOV的扫描,这就相当于 “用XXX线的机械式/ 一维转镜式激光雷达扫描出来的效果一样”。
但是,受限于转镜或MEMS振镜的工作频率——实际上,目前(2022.Q2)MEMS和二维转镜式整体的点云密度/出点速度,仍然是不如高指标的传统机械雷达以及一维转镜雷达的。例如,禾赛Pandars128机械雷达在单回波模式下每秒出点345万,禾赛AT128一维转镜雷达单回波每秒出点153万。而二维转镜和MEMS的LiDAR,出点速度过百万的产品也不多。
Ref:
官网:
速腾聚创 - RoboSense(速腾聚创) - 自动驾驶激光雷达(M1 MEMS激光雷达)
北京一径科技_固态MEMS激光雷达 (zvision.xyz)新闻:
路特斯ELETRE首发 凭借速腾聚创RS-LiDAR-M1激光雷达实现全面感知 (baidu.com)
3.3.4 固态激光雷达1:光学相控阵OPA——类似雷达的原理
配合测距方法:TOF,FMCW(更合适)
**代表厂商:Quanergy(已倒闭),**截至2022Q2,国内厂商基本都处于预研阶段。包括力策科技,洛微科技,万集科技、国科光芯、速腾(有布局)、镭神(有布局),整体产业发展是比较缓慢。
光学相控阵(Optical Phased Array)的实现原理和毫米波相控阵的实现原理一样,都是利用波的相干性改变波的方向,不再重复叙述。其存在一些工程上的难点:
-
根据相控阵原理,要求激光的阵列单元尺寸约等于半波长,这意味着发射单元的尺寸在数百纳米,对硅光芯片的加工会比较困难。
-
Quanergy采用OPA+ToF的方案,ToF方案的瞬时功率太高,可达40-50W,硅光芯片根本扛不住如此高的功率。而降低功率又使得探测距离不足,当前只能支撑100m左右的探测。
-
同样的,在相控阵Radar研发中出现的难题,如:旁瓣效应、易受环境光干扰、信号处理算法复杂也会出现在OPA LiDAR上。

Quanergy 光学相控阵Lidar
- OPA+FMCW:4D激光雷达
代表厂商:Mobileye(CES亮相)、洛微、Aeva
前面提到了激光FMCW测距,而恰恰连续调频波的瞬时功率很低,可以完美的配合OPA实现空间的扫描,实现所谓的4D激光雷达,是固态激光雷达的一个相对热门的方向。
Mobileye 4D成像雷达:拥有更广泛独特动态范围的超高分辨率雷达,可提供丰富而准确的场景图像_哔哩哔哩_bilibili
3.3.5 固态激光雷达2:Flash——类似相机的原理
核心器件:VCSEL + SPAD
代表厂商:禾赛、速腾聚创等(基本都在搞)
**可配合测距方法:**ToF,AMCW
- 测距原理
**如何形象的去理解Flash激光雷达的原理?**想象你处在一个黑暗的环境下,手里举着一台照相机。当你想要拍摄照片时,相机的闪光灯打开,照亮了环境,当曝光结束后,闪光灯随之熄灭,环境再次归于黑暗——这是一种可见光的Flash(闪耀)。
而Flash LiDAR的原理类似,在其对应的905nm或1550nm波段,待探测的环境可以视为是一片黑暗(环境中的此波段红外线并不多),而Flash LiDAR配备了阵列式的发射光源以及接收部件,短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器(SPAD,单光子雪崩二极管增益极高),来完成对环境周围图像的绘制,最终生成的数据包含了深度等3D数据。
现在来解释为什么其更加适合AMCW的测距方式,**AMCW本质上是通过测量反射激光的强度来确定距离的,**自然地,对于CMOS工艺的芯片,这种测量是很容易实现的。不过其最大的弊端就在于忽略了“不同目标有着不同的激光反射率”这一因素,使得测量准确性大打折扣,**属于先天硬伤。**当然,Flash LiDAR用TOF也不是不行,这意味着对于每一个“Pixel”,都需要单独的一套计时的电路。
由于结构简单,集成度极高,Flash闪光激光雷达是目前纯固态激光雷达一种主流的技术研究方向。实际上,所谓的Flash Lidar也是深度相机方案的一种**。**

LeddarCore flash LiDAR

Flash LiDAR工作原理(左:结构光模式)
从其工作原理,我们完全不难推断其最大的难点:Flash LiDAR相当于一台将照相机将闪光灯、感光元件都集成在了一块芯片上。要想看得清楚,这个“闪光灯”的功率就必须足够大,如果采用AMCW测距,这个“闪光”的时间还需要长一些——显然,一般的芯片根本扛不住这种功率。
因此,当前缺点是:
-
VCSEL器件可输出的功率密度低,导致其有效距离一般难以超过50米,一般作为补盲雷达使用;
-
当前可实现的车规级SPAD阵列约为1W像素(民用已有30W像素),致使其分辨率较低。
今后如何增加VCSEL输出功率,增大SPAD阵列密度,将会是Flash LiDAR需要解决的难题。
- 车规级的市场化
-
搭载3个Ibeo Next固态激光雷达的长城WEY摩卡车型预计在2022年量产;
-
Ouster ES2选择牺牲扫描角度(26°×12°)换取较远的探测距离(200m),预计2024年实现批量交付。
-
2022年11月,禾赛FT120 Flash激光雷大发布,主要用作车角补盲雷达;
-
速腾聚创紧随其后,在11月7日的Tech Day上,发布了自家的纯固态激光雷达产品E1;
真·纯固态激光雷达?禾赛 FT120 有点东西_哔哩哔哩_bilibili速腾聚创首款全固态补盲激光雷达E1系列首次公开亮相|CES现场_哔哩哔哩_bilibili
3.3.6 激光雷达方案汇总
当下,转镜式和MEMS会落地,而长期来看,其只是过渡方案,固态的激光雷达肯定是一个发展的大趋势。
固态的方案中,OPA+FMCW以及Flash是两个有希望的方案。而学界和业界更为认可、更能吸引到投资的则是后者。极快的速度、极高的集成度、很低的成本、如今天的照相机一般易得,这都是人们对于Flash LiDAR的愿景。
但也必须客观看待激光雷达的发展,固态激光雷达都有着十分难以逾越的障碍,车规级硬件的研发又会面临较为严苛的工作环境以及测试。其开发周期必定是以年计,很多投资科普类的文章会热衷于将雷达的种类罗列一番,但完全没有阐明其主要技术障碍,因此任何大跃进的思想在这块都是行不通的。
| 成本 | 体积 | 测量速度 | 精度 | 安全性 | 工作寿命 | 量程 | 备注 | |
|---|---|---|---|---|---|---|---|---|
| 机械式 | ❌万美元 | 大 | ✔快 | ✔ | ✔ | ❌3000h | ✔300m | 未来逐步淘汰 |
| 转镜式 | ✔数百美元 | ✔ | ✔ | ✔ | ✔ | ✔中等 | ✔中 | 当前的落地方案 |
| MEMS | ✔数百美元 | ✔ | ✔快 | ✔ | ✔ | ✔ | ✔中 | 热点落地方案 |
| OPA | ❌高 | ✔ | ✔中 | ✔ | ✔ | ✔ | ✔最远 | FMCW+OPA有前景 |
| FLASH | ✔远景最低 | ✔ | ✔极快 | ❌当前不足 | ✔ | ✔ | ❌当前小 | 前景较大 |
疑问:
A. TOF的精确计时原理,TDC电路如何做到ps级别的计时?
B. 激光雷达的寻峰算法是什么?
D. LIDAR输出的信息编码格式是怎样的?后续应了解TCL、ROSMSG点云格式
3.4 Backups 激光雷达厂商概况
一些激光雷达的宏观市场信息,来源于厂商网站与券商研报,可保证2022年有效,这种东西不搞投资看一眼就行,没太多意义。中国市场太卷,情况每个季度都在快速变化。

各车企2021-2022年搭载激光雷达车型



4. 相机 Camera
相机话题比较大,本文简单介绍下,后面单独发个文章介绍camera原理
4.1 相机的特殊性
同其他传感器相比,相机是一个非常独特的传感器。其独特性体现在三个方面:
4.1.1 有源与无源
前面提到的雷达都可以视为有源传感器,即自发自收电磁波信号,完成感知。而大部分的相机则可理解为一种无源传感器(不包括深度相机,主动式红外相机)。其自身并不发出信号,而是依靠CCD/ CMOS 感知周围环境物体发出的可见光。光源则可以来源于太阳、电灯、屏幕等(闪光灯也可视作外部光源),经过物体散射进入相机传感器。这一特性决定了普通相机在缺少外部光源的环境下(弱光环境)工作十分受限,如同人眼在昏暗环境下感知能力大幅下降一般。
而自发自收的Radar/Lidar则不受此类影响,相反地,雷达还需要尽力摒除环境中同频率的杂波干扰。
4.1.2 强度的感知
Camera另一个重要的特性是,十分强调对 “可见光强度intensity”(电磁波能量大小 or 振幅)的敏感性,根据单位时间接收到可见光能量的大小,将其转化为不同的灰度值(如0-255)。而对灰阶的重视使得相机具有丰富的纹理信息,最终这些纹理转化为了所谓的**“语义”**。
当然,并不是说,其他传感器没有对 “强度intensity” 的感知,例如激光雷达就可依据车道线与环境对红外线反射率的不同,达成对车道线的识别;金属也对毫米波具有极强的反射性。但总体而言,其他传感器的侧重点更多放在了 “有 or 没有”,对强度的感知没那么侧重。
相机对于“强度”良好感知来源于光电二极管良好的线性输出(式25),其积累电荷与输入能量成正比。

对“强度/ 振幅”的感知形成黑白图像,多个电磁波频率的感知形成彩色图像
4.1.3 单频率与多频率
如果仅凭感知强度的话,相机只能形成黑白图像,其语义信息仍然不够丰富。通过模仿人类的三种视锥细胞,相机配备了三种传感器,分别感知:**615620nm的红光,530-540nm的绿光,460470nm的蓝光,**进而由接收的三原色的比例来合成彩色图像,赋予图像更为丰富的颜色信息。
**相机是唯一同时接收多个频率的电磁波,并将多种电磁波进行融合的传感器。**而其他大多传感器只能接受单一频率的电磁波。

CMOS感知RGB光源
“强度感知” 与 “多频率感知” 给使相机具有以下特点:
-
远超其他传感器的感知能力、信息密度;
-
信息相比Radar,LiDAR十分隐含、抽象,需要更高级别的智慧来对图像做出解读。
-
意味着算法可挖掘的潜力巨大,但对算力的要求也更高。
4.2 物体的显色原理
岔开话题,提一嘴物体的显色原理。
4.2.1 主观的颜色
**“特定的波长的光呈现某种特定颜色” 这一定义是十分主观的,例如“波长570nm的光呈现黄色”。这是在人类进化过程中视觉细胞与大脑约定俗成的。**甚至,在不同生物之间,其色觉感知存在很大的差异。人类理解世界所采用的这一套色觉体系,很大程度上仅适用于我们人类,例如狗就没有感知红色和绿色的视锥细胞,而一些鸟类对颜色的感知要比人类更加丰富。

模拟差异:鸟类色觉与人类色觉
4.2.2 电磁波的吸收与反射
物体(分子、原子)都具备吸收和反射电磁波的能力,而且不同物体对不同波长的电磁波也有所偏好。例如水对微波的吸收能力极强(微波炉),纯银(铝)对所有可见光的反射性极强(镜子);当然还有的物体对电磁波不吸收也不反射(玻璃)。
以红色物体为例,其对于波长650nm左右的红光的反射性最强,而会吸收其他颜色的可见光。于是,它在人眼中就会呈现红色。

物体的显色
而被吸收后的光子则有以下去向:
1、被电子吸收,微观上转化为电子的动能,宏观上表征为物体内能增加,温度升高。(颜色越深,吸收可见光越多,温度越高,理想的黑体不反射、投射任何电磁波)
2、如果电子所得能量很高,可以脱离导体表面形成光电流,那么其定向移动表征为电磁能(光电效应)。
3、若电子能量再高一些,其动能足以同其他电子发生碰撞,摆脱原子束缚,进而破坏分子结构,则会表征为化学能(光合作用)。
4、表征为质量。
4.2.3 电磁波的向外辐射:红外夜视仪
除了吸收、反射电磁波,物体还可以发射出电磁波。任何温度高于绝对零度(-273.15℃)的物体都具有内能,表征为分子原子的无规则运动。而内能则会以电磁波辐射的形式发散出来,其内能越高,辐射的波长也越短(加热到几百度,就可以发出可见光)。地球环境温度下,辐射的电磁波频率恰好处在红外线波段。
而能够捕捉物体放射出的红外线的仪器,也就是红外热像仪(夜视相机)。
夜视相机有主动式和被动式两种,被动式利用了物体本身的自发辐射;主动式则会发出红外线,并接收反射信号,其实可以理解为开了相机“闪光灯”,只不过这个“闪光灯”发出的是红外线,人眼看不见。
同普通相机一样,红外成像同样具有抽象的纹理信息。因此,在自动驾驶的传感层也会有一定的潜力。

红外成像
此外,军事上还会用到微光夜视技术,不做讨论。
4.3 感光器件
- CCD与CMOS工作模式
本节基本没意义,可以直接跳过。CMOS工艺进步较快,在民用上占绝对优势。性能和价钱成正比。
CCD(Charge Coupled Device 电荷耦合器件):
结束曝光后,控制电路会将 CCD 每一列中的每个电容把自己的电荷传给相邻的下一个像素的电容,最后经过传感器末端的一个电荷放大器,转化为电压信号。
CMOS(Complementary Metal-Oxide Semiconductor) 互补式金属氧化物半导体(硅锗):
每个像素的光电二极管都会连接一个放大器和 ADC 电路,读出该像素的值。

CCD与CMOS的区别
根据CCD和CMOS的工艺差异,可以得出以下优缺点(当前CMOS工艺发展较快)
| CCD | CMOS | |
|---|---|---|
| 成本 | 链式传递,良品率低,成本较高 | CMOS独立,周边电路的成本较低 |
| 开口率 | 高 | 低(堆栈式CMOS开口率高) |
| 动态范围 | 高 | 低 |
| 快门 | 天然的全局快门,无“果冻效应” | CMOS则按列报数,为卷帘快门。 |
| 噪声 | 所有的电荷经过的是一个电荷转换器,因此转换的一致性比较好,噪声小。 但可能产生电荷溢出(Blooming)Fading(电荷衰减)。 | 抗干扰性比较强,但每一个电路比较难保持一致性。 |
| 读取 | CCD为逐个读取,速度慢 | CMOS则要快 |
| 能耗 | CCD为被动式读取,需要外接12V/18V电源 | 能耗约为CCD的1/10 |
Ref:
CCD CMOS传感器基本工作原理
- 感知单元:微透镜阵列

前照式与背照式
感光芯片的最小单元由:微透镜、滤光器、光电二极管、金属连线层组成**。**其布置形式有前照式与背照式两种。微透镜用于汇聚光线,滤光器只允许目标波长的光透过,而其他波长的光则不会透过,光电二极管将光信号转化为电信号,其强度与光强度成正比。
对颜色的感知:利用滤光系统,1R,2G,1B。Bayer滤镜。

Bayer Filter
4.4 ISP 图像信号处理
ISP(Image Signal Processing) 图像信号处理。将CMOS、CCD发出的电信号处理为可视化的图像。不想写,和主题相关性不大,网上资料也多。。
参考资料
光电探测器PMT、APD、CCD、CMos、ICCD、EMCCD等各自的优势和劣势? - 知乎 (zhihu.com)从微观的角度来看,光能是如何转化成其他形式的能量的? - 知乎 (zhihu.com)Thermographic camera - WikipediaCCD(电荷耦合元件)_百度百科 (baidu.com)CMOS_百度百科 (baidu.com)键盘摄影(五)——相机成像元件:CMOS/CCD - 知乎 (zhihu.com)黑体辐射理论_百度百科 (baidu.com)普朗克长度_百度百科 (baidu.com)
5. 机械波与超声雷达 Ultrasonic Radar
5.1 超声雷达的原理与局限
再来看一下超声雷达,超声雷达已经是相当成熟廉价的产品,十多年前的汽车基本都配备了超声雷达用于倒车辅助。我们观察到的前后保险杠上的一个个小圆圈,就是超声雷达。

Audi A8的前向超声雷达
与前面的传感器不同的是,超声雷达采用的是机械波(声波)来传递信号。超声波的发射原理很简单:无非就是将一定频率的电流通过换能器转化为一定频率的机械振动(一般为20Khz-100Khz),换能器一般多采用压电陶瓷,当工作在谐振频率时,可达到最佳效果。
超声雷达的发射器件没什么挑战性,至于接收原理更简单,就是发射原理的逆效果,这里不再赘述。
车用超声雷达有着很大的局限性:
特性一:温度敏感
声速与空气的温度相关:C = C0 + 0.607 * T,C0为0°时的声波速度332m/s,那30℃时,超声波的传播速度为350m/s。因此还需要将环境温度纳入到传感系统中。
特性二:无法精确描述障碍物位置
车用超声雷达只能给定障碍物的距离,但无法确定障碍方位。此外,超声波散射角大,方向性差,测量远距离物体精度很差。
**当然,其实就是受制于体积成本不想做而已,**实际上利用前面提到的MIMO Radar原理,实现超声测角并不难,只不过分辨率也不会很高。

特性三:高速场景的实时性差(硬伤)
声速比光速慢的太多,如需检测100m处的物体,其时间延迟为0.2m,当汽车以120km/h高速行驶时,则汽车已经走出20m,超声雷达很难跟得上汽车的实时变化。
随便提一句,超声雷达的优点是在适合水下探测。因为电磁波在水下衰减速度非常快(无线电只能用长波雷达联系潜艇,且通信速度极慢,天线尺寸巨大,公里级别)。而超声波在水下衰减慢,因此船只一般都用“声纳”探测海底环境。
5.2 防止“灯下黑”
具备如此多的缺陷,但并不意味着超声雷达在自动驾驶中没有用武之地。LiDAR,Camera,Radar一般用来检测5m开外的目标。**而汽车半径5m内的空间则是其“盲区”,正是所谓的“灯下黑”。而超声雷达是当前检测近处物体最为高效、省钱的方案。在泊车、行人“鬼探头”**场景下,超声雷达发挥着重要的作用。当然,现在以tesla为代表的厂商开始舍弃超声雷达,而是用视觉包揽。

行人“鬼探头”场景
另一较为有趣的应用场景是“高速场景的横向辅助”,尽管这个案例很古老了,在Tesla的Autopilot 1.0版本中,当后面的一辆车对己方进行超出的时候。车辆可以在车道内进行轨迹微调,在允许的一定范围内对进行避让,从而提升安全性。
6. GNSS-RTK全球定位
GNSS技术应该算作是**“定位技术”**,其具体的实现方式不谈,后面如要系统性的总结定位方法再写。目前讨论其“电磁波信息传输”的属性。
GNSS是全球导航卫星系统的简称(Global Navigation Satellite System)。GPS的根本原理还是电磁波通信,只不过是空基的。

GNSS定位技术:空基电磁波通信
各国的GNSS信号频率在1.5GHz附近,可推算波长0.2m左右。那么同样可以轻易得出一些结论:
1. GNSS的波长特性使其信号传输受浓厚云层、大雾、雨雪的影响不大。
2. 信号在空旷地带效果最佳,**城市的高楼大厦,山区的山体都会阻挡、反射信号,**极大影响信号传输。
同时,因为其电磁波的本质,GNSS信号不可避免的会受到大气层中电离层、对流层的折射,从而产生误差。这也是GPS信号误差的一个很重要的来源。当然,可以通过PPP,RTK等差分技术消除。
再说用来消除GPS误差的RTK(Real time Kinematics)系统,它的信号的频率在410-470MHz之间,其波长为0.7m左右。同样的,这个波长可以使RTK信号免受天气的影响,但在城市、山区、隧道的工况下仍然面临很大的问题。这其实就是GNSS-RTK无法在100%工况适用的根本原因,很难有 “出现一种新技术,使得GNSS-RTK能够覆盖100%场景” 的情况发生。
参考资料:
Satellite navigation - Wikipedia
7. 无线通信与V2X
许多汽车行业企业的愿景是:未来将汽车打造为一种**“智能终端”**,汽车将拥有接入互联网能力,与道路、其他车辆、行人产生信息交互,即所谓的V2X(Vehichle to Everything)。
2021年11月16日,工信部发布了《“十四五”信息通信行业发展规划》,规划指出将在2025年完成相当规模的c-V2X基础建设。V2X技术可以为自动驾驶、人机交互提供支持,而这一切又跟另一个火热的概念“5G”扯上了联系,而5G说到底又是对电磁波的应用。

V2X设想图
7.1 无线通信的简要原理
前面提到的传感方式,更多将注意力放在了电磁波的频率、相位、方向上,而无线通信则更关注**“波形”**的调制。利用电磁波的高、低振幅表示数字信号 0 或 1,从而完成数字信号的传输过程,当然,现实的技术细节远比此过程复杂。

常用基带波形

5G相对于4G的一个重要优势是其时间延迟极短。一般4G的无线链路延迟最少要20-30ms,而理想情况下5G可以做到1ms左右,低延迟的信号传输 可以满足自动驾驶系统的低实时性需求。当然,副作用前面也提到了,代价就是需要进行基站的超密组网,这是一比相当昂贵的基础建设费用。

7.2 定位潜力
如果能实现5G的超密组网,能够带来另一项副产品:高精定位。其定位的原理同GNSS基本一致。当前5G的定位精度潜力在1m左右,在城市环境下作为一种辅助定位手段,具备不错的潜力。

不同定位方式的精度,By TUM,2020
8. 单传感器 vs 多传感器
感知-定位-决策-执行四层,感知是基础。如何提升感知能力,一直是众多自动驾驶参与者的目标之一。
具体的做法无非两种:一是拓宽感知,采用多个传感器接受更多的信息,其二则是加深感知,通过深度学习提升系统的智慧程度,使其靠近人类大脑的处理能力。绝大部分公司两手抓,只有Tesla选择了第二条路(当然在这条路上的耕耘也最深)。围绕这一话题的口水仗层出不穷,哪一方都认为自己的道路才是正确的,而对方走的是邪路。这与围绕高精地图的论战也很相似。
但作为一个汽车从业者,汽车行业的市场太大了,**大到足可以容纳多种方案在市场上并存:**混合动力方案就有增程、Dmi为代表的直连、THS行星齿轮好几种;电池方案有:三元锂、铁锂、钠电池等等;很多方案尽管有差异,但最终都能够出色地执行其任务。在当前这种技术没有显性代差的情况下,汽车行业还存在着太多性能和成本之间的博弈和取舍。因此现在的口水相当多都是为了拉拢投资人而已。
我个人想要从最接近信息本源的角度来探讨这个问题,这样结论或许会更清晰。如开头所言,极宽频谱范围内的机械波、电磁波都可以作为传递信息的工具。而在太阳光的波段分布中,可见光是能量密度最高的。也因此,人类在漫长的进化过程中,选择了390nm-760nm的可见光来高效的感知世界。

太阳光的波段分布,“可见光”的成因
但这并不意味着可见光在任何场景下都是最优的感知方案,例如夜晚可见光感知能力就会大大下降;而能感知红外线的生物在夜晚就能畅行无阻。
所以,人类将机器的感知波长也锁在390nm-760nm的可见光内,舍弃绝大部分频率的信息渠道,这是否还是一种明智的做法?
一些说法是:“人类这么多年基本只靠眼睛就开车开的非常好,因此自动驾驶只用视觉信息就够了”。然而,通过前面的描述,我们知道,任何感知系统都是有物理极限的,**且不以技术进步为转移。**人类驾驶过程中因为超出了感知极限而导致事故的原因比比皆是。
对于自动驾驶,从GNSS到毫米波,再到红外激光、可见光,每一个频率都有其特性的优势,将这些不同场景的优势融合发挥出来,才能突破人类感知的极限。不否认“增强系统智慧性”的必要性,但这种智慧性,不应当被禁锢在可见光的波长范围内。