blender 之点云渲染(论文渲图)
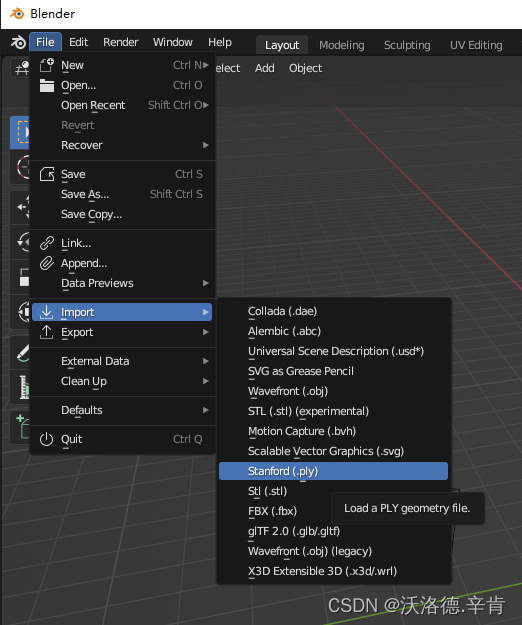
- 一、导入点云
- 1.新建
- 2.导入点云
- 3.位置移动&放大缩小
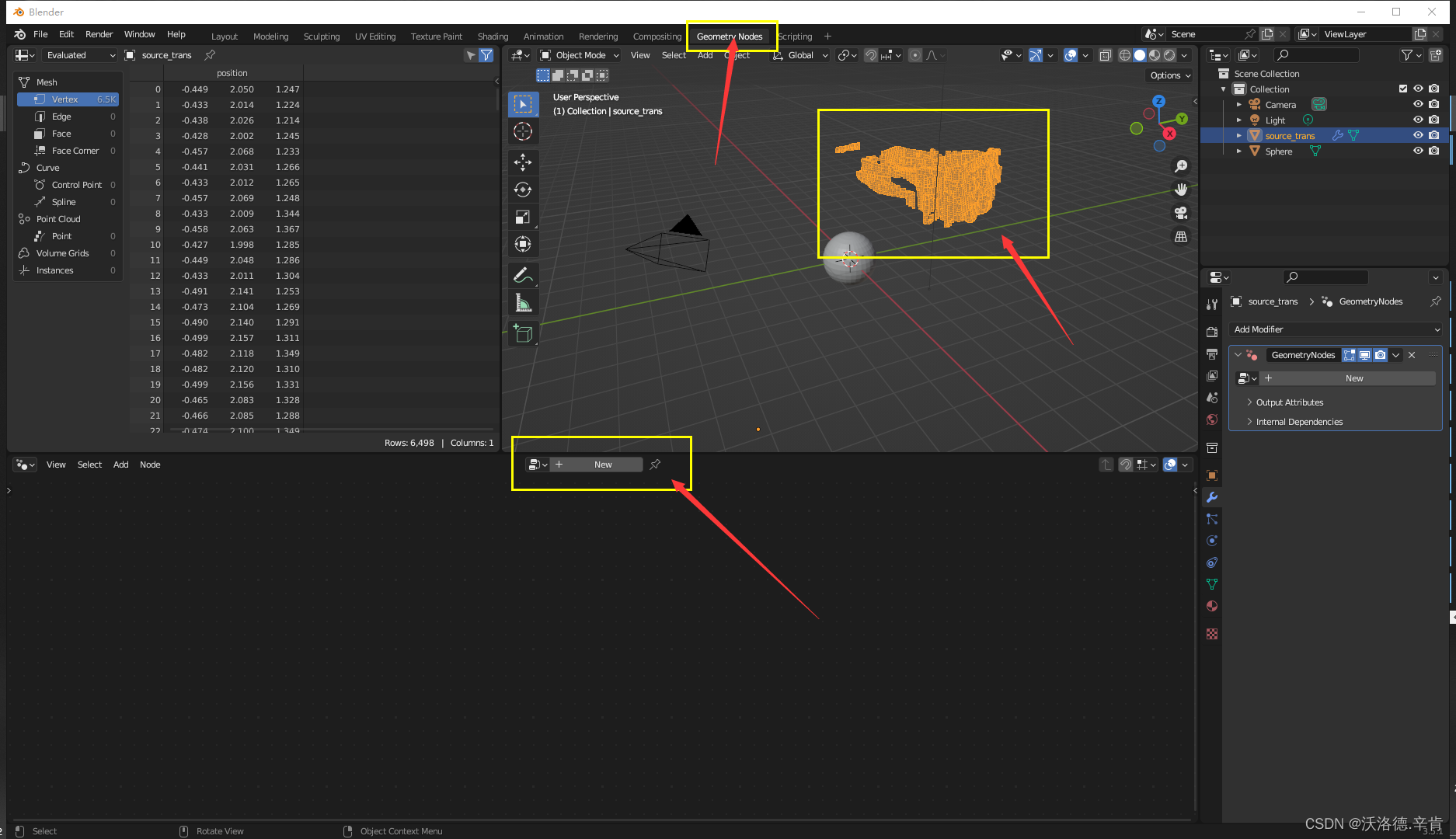
- 二、Geometry Nodes实体化点云
- 1.新建节点
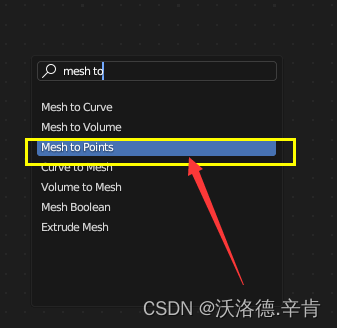
- 2.实体化
- 三、给实体化点云添加材质
- 四、设置渲染引擎
- 更换为Cycles。
- 五、对准视角
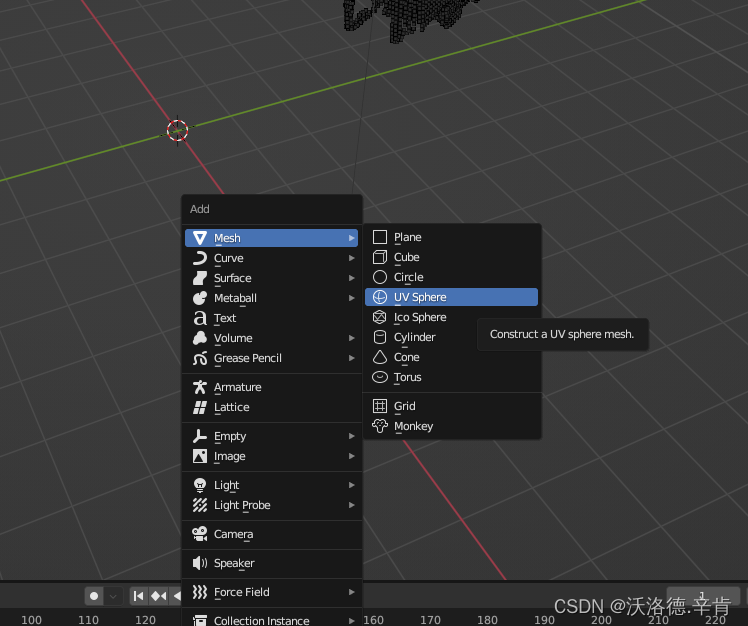
- 1.新建一个球
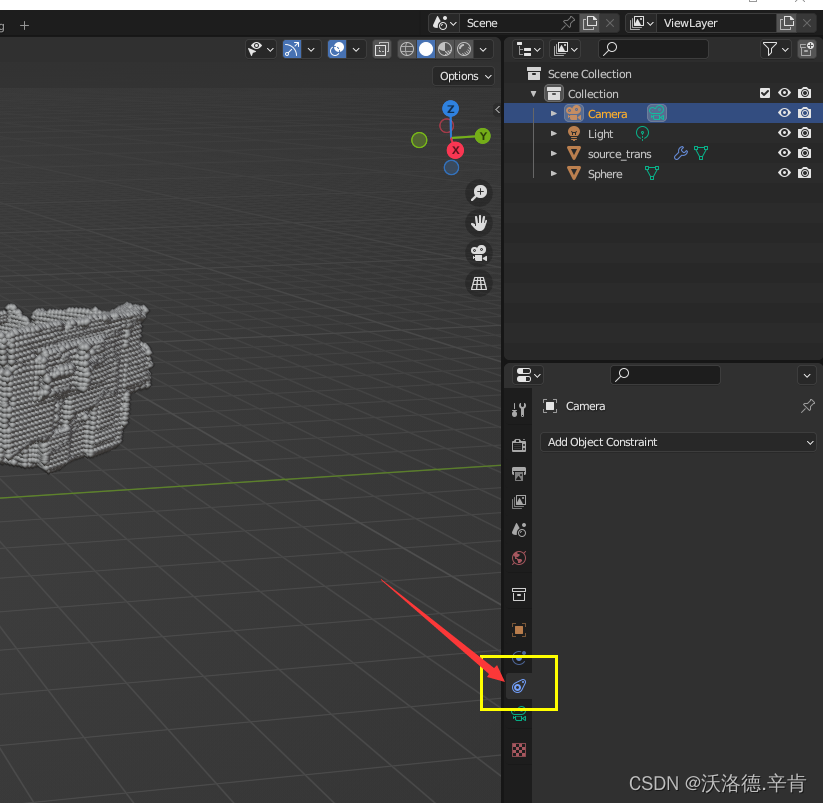
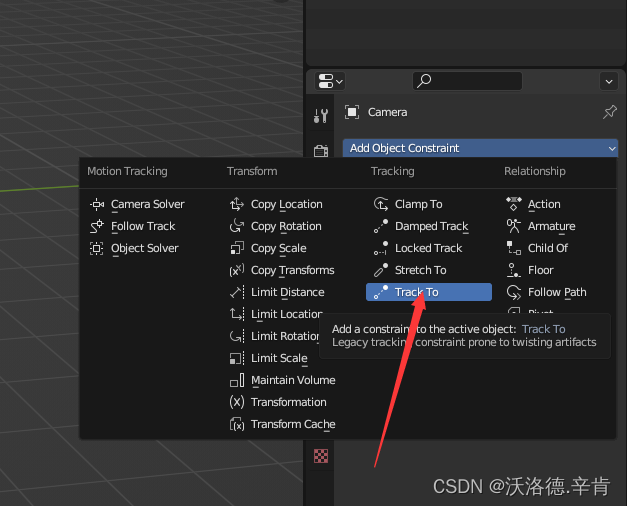
- 2.创建相机视角跟踪
- 3.将uv球挪动至点云处
- 3.1 左移,拉出来
- 3.2 将质心归位到点云中心
- 3.3 将UV球的质心和点云质心对齐
- 3.4 关闭对球的渲染
- 六、添加平面,制造阴影
- 1.添加平面,并放大。
- 2.背景透明化
- 3.平面透明化
blender 3.5
一、导入点云
1.新建

2.导入点云
粘贴路径到这个位置,回车
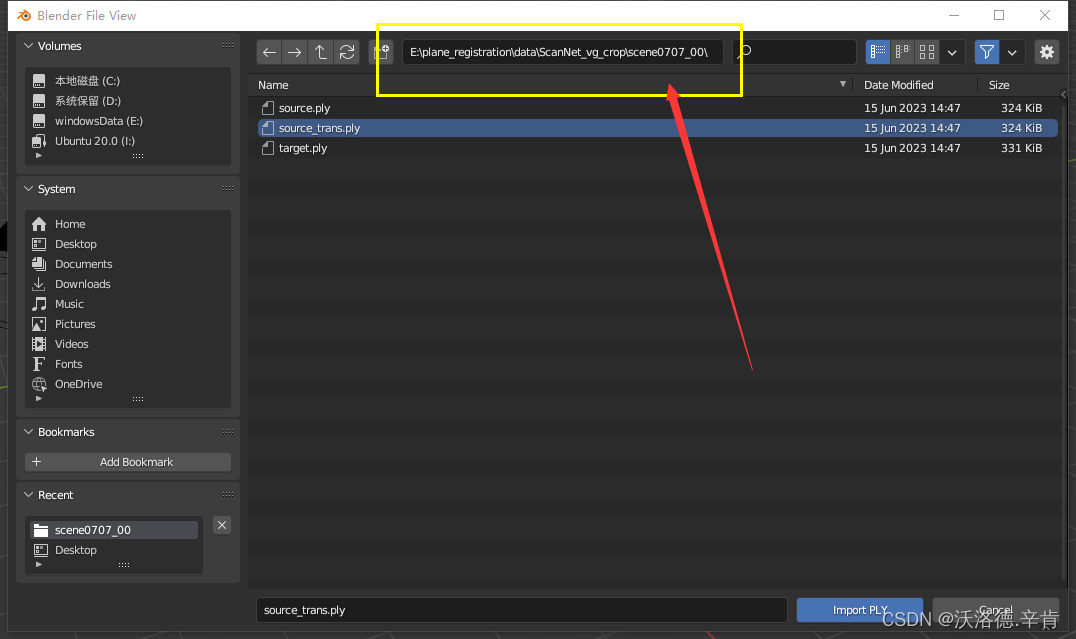
选择点云文件,Import PLY
3.位置移动&放大缩小
位置移动:选中点云,按下S,移动鼠标;
放大缩小:选中点云,按下G,移动鼠标。
二、Geometry Nodes实体化点云
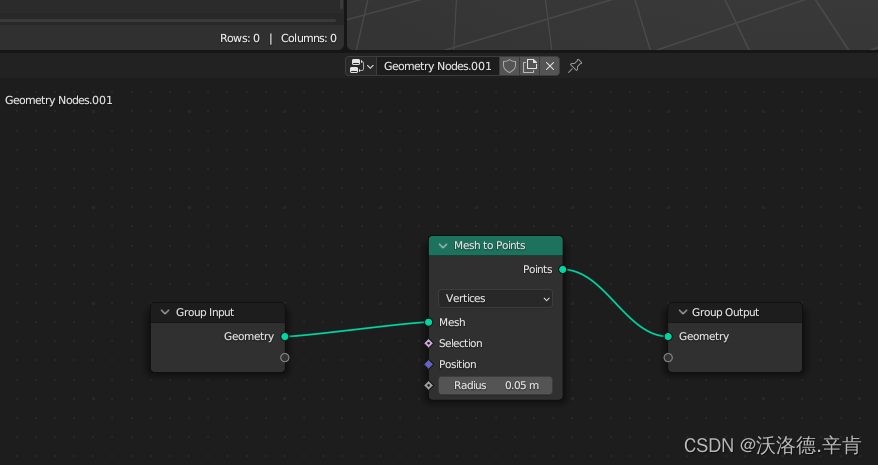
1.新建节点
2.实体化
shift+A 左键点击search
拖动新建的节点
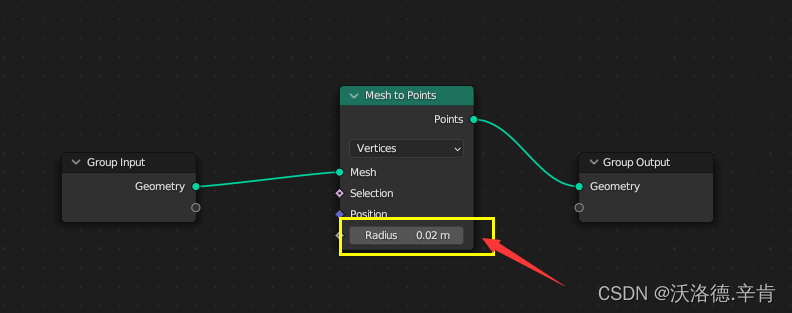
调整点云球的大小
三、给实体化点云添加材质
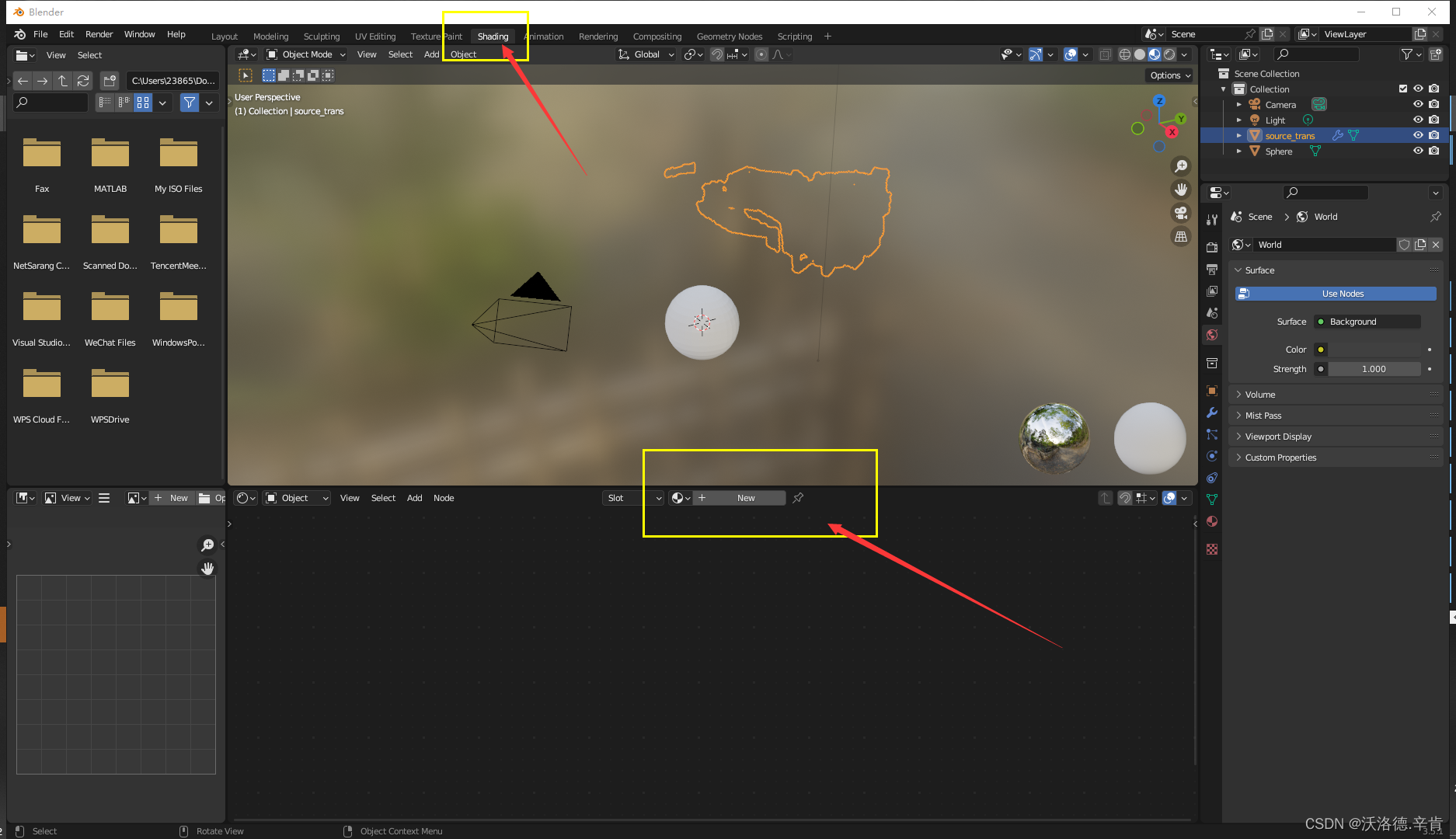
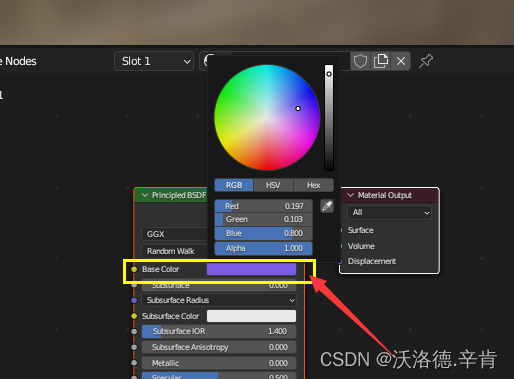
选择点云颜色
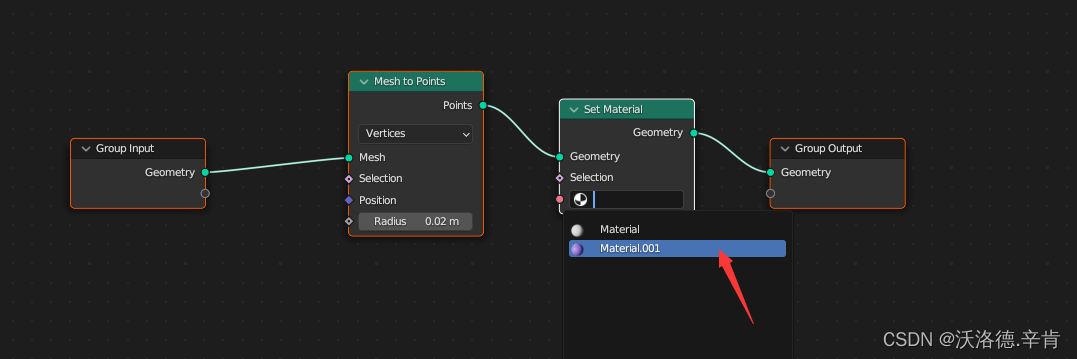
新建set material节点
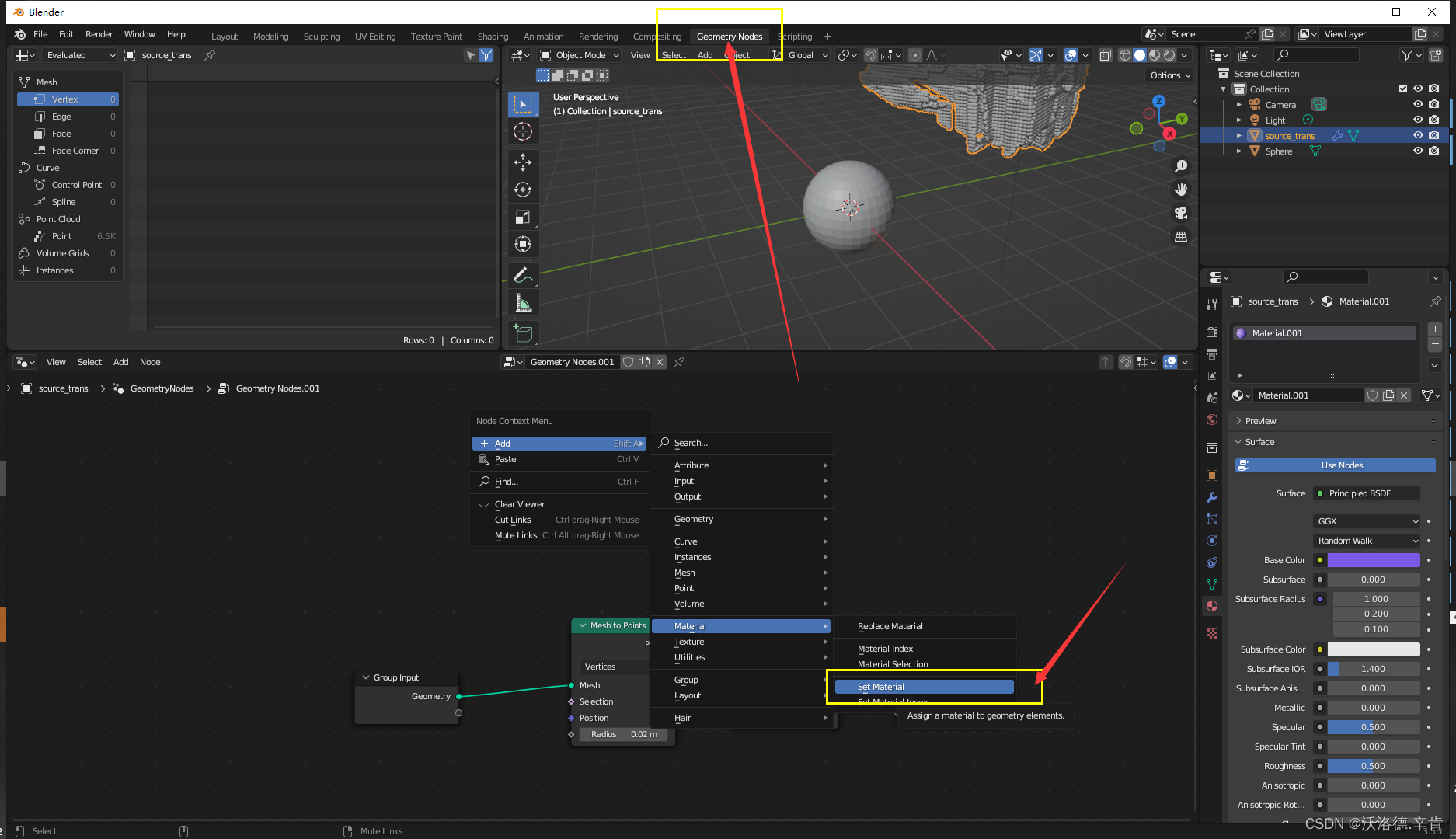
拖动,并选择material
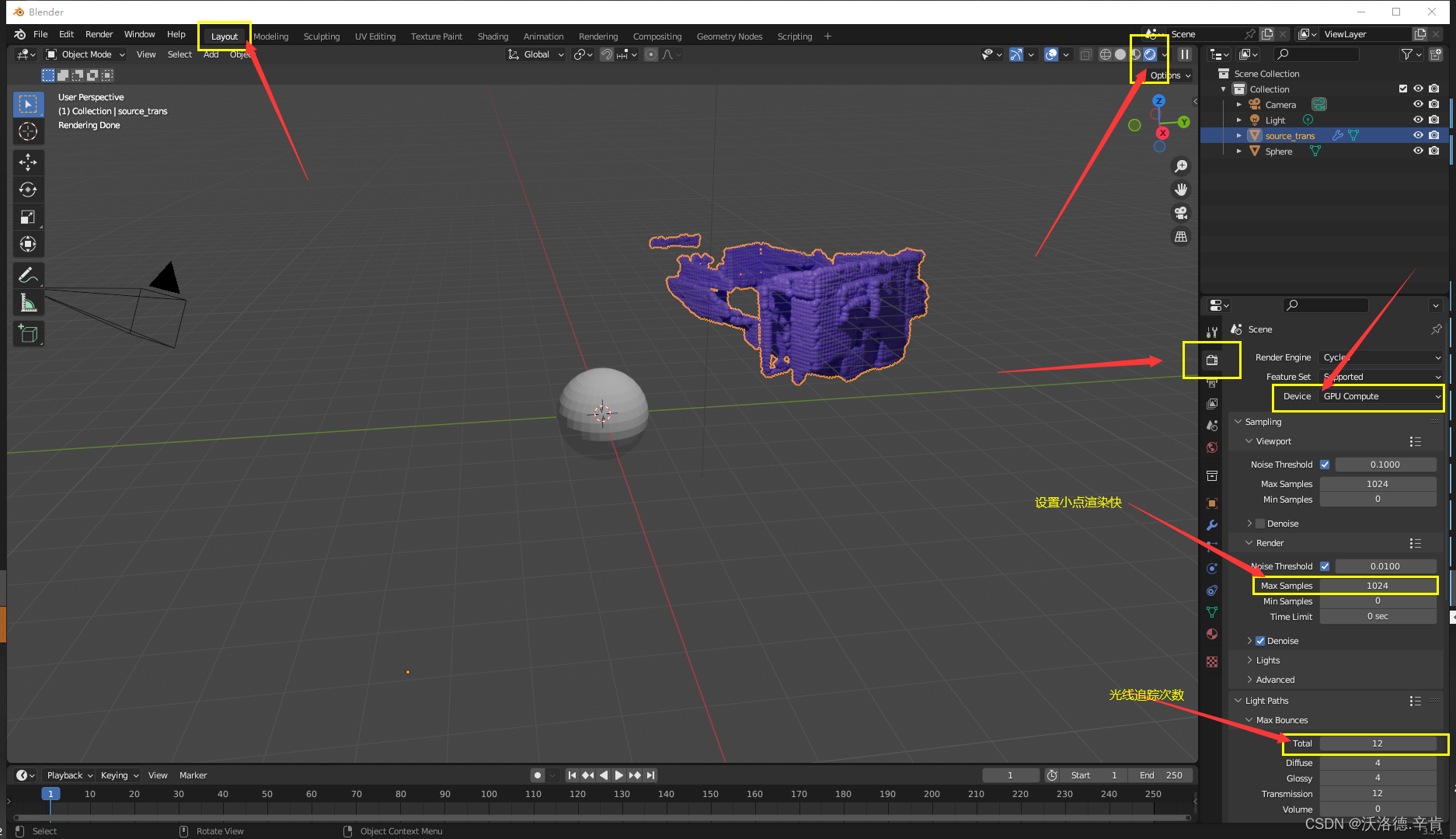
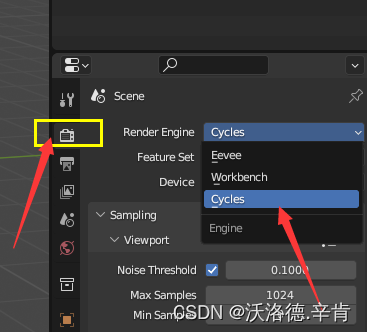
四、设置渲染引擎
更换为Cycles。
五、对准视角
1.新建一个球
按下shift+A
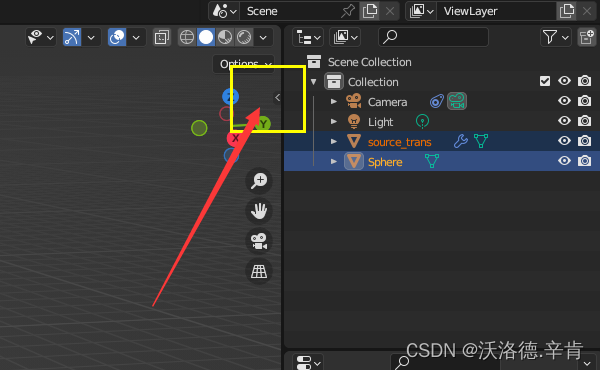
2.创建相机视角跟踪
如下图,左键单击右边黄框,移动鼠标至UV球处,再次单击左键。
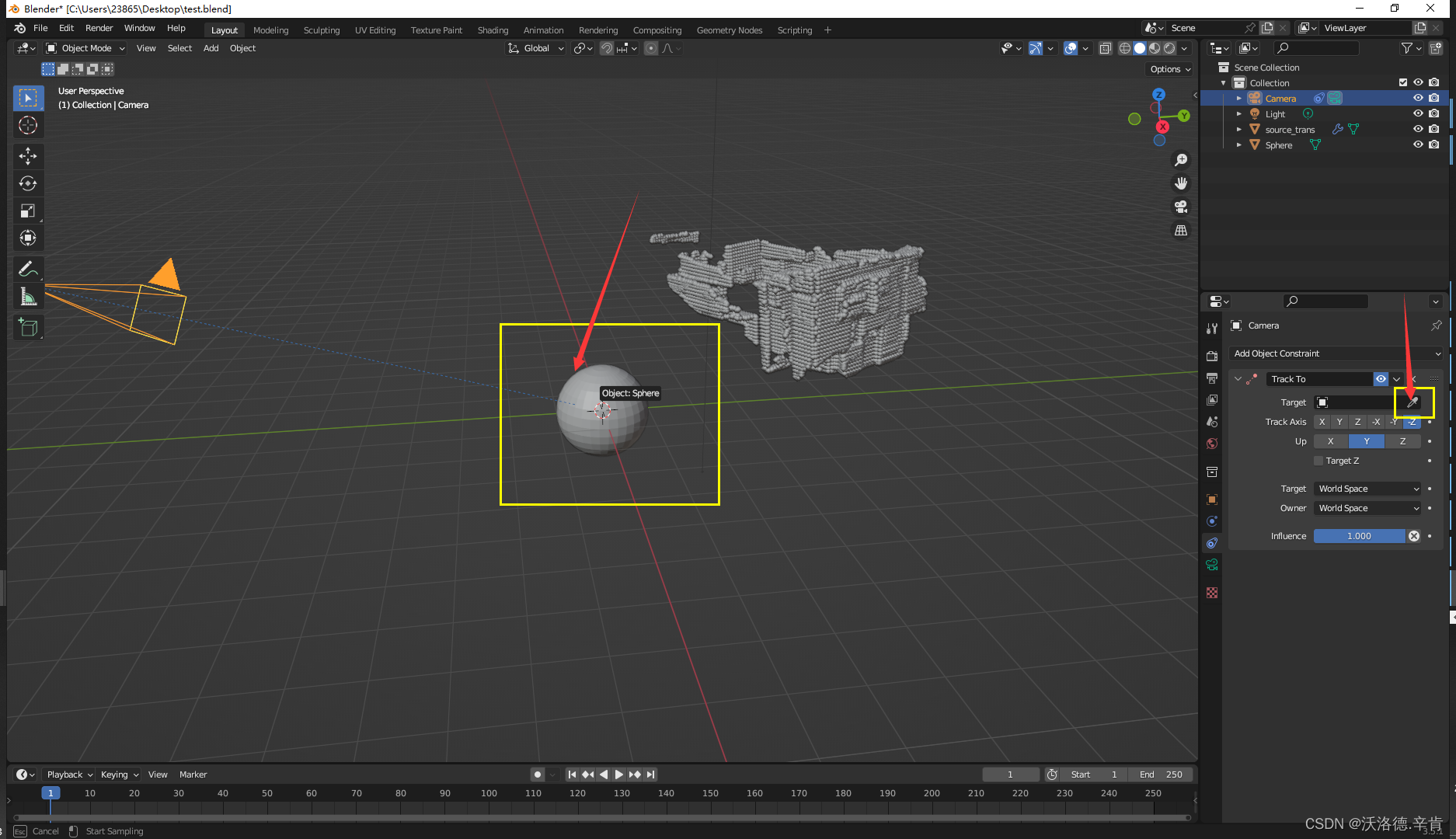
此时相机视角跟着球转动。
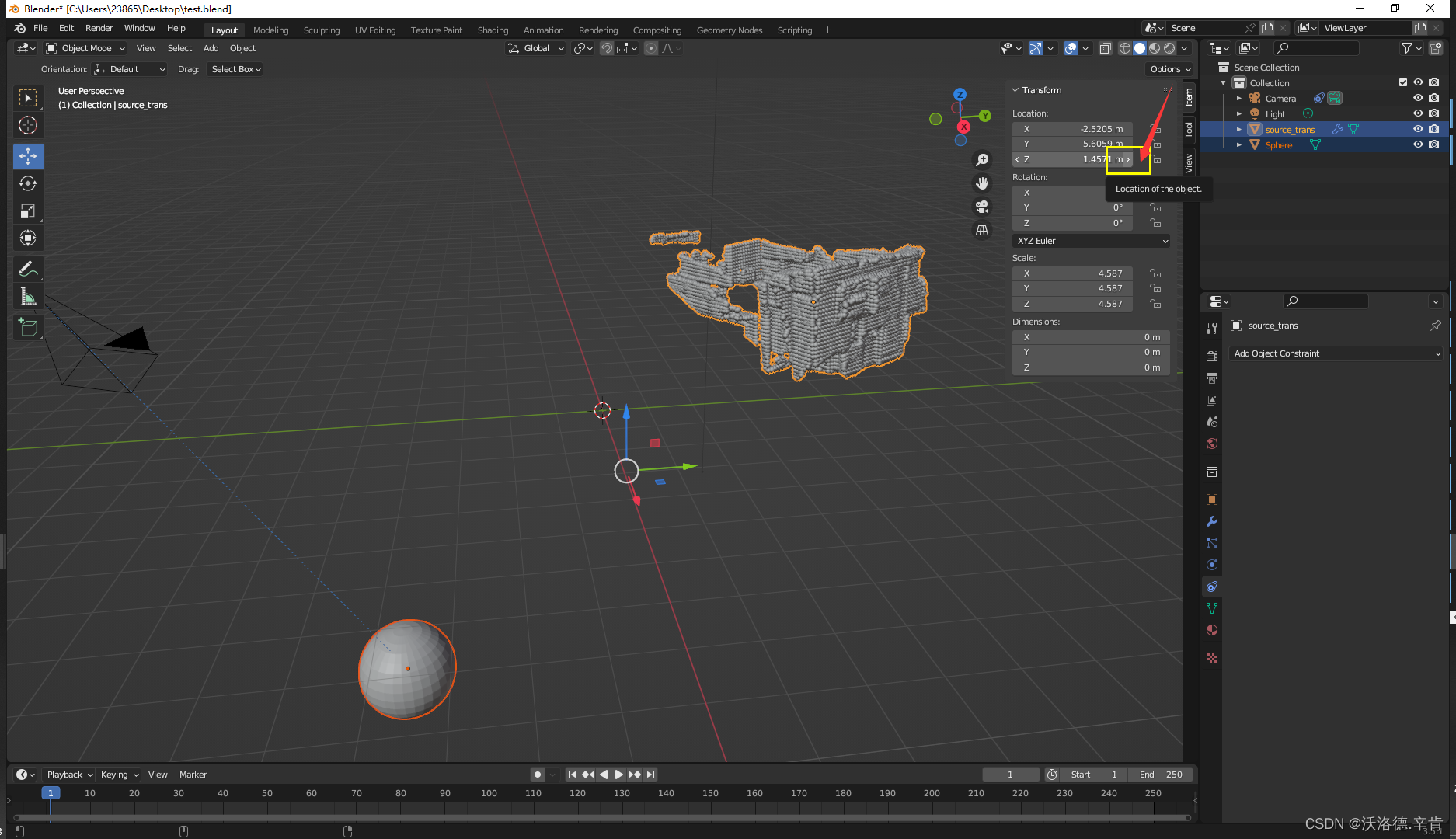
3.将uv球挪动至点云处
3.1 左移,拉出来
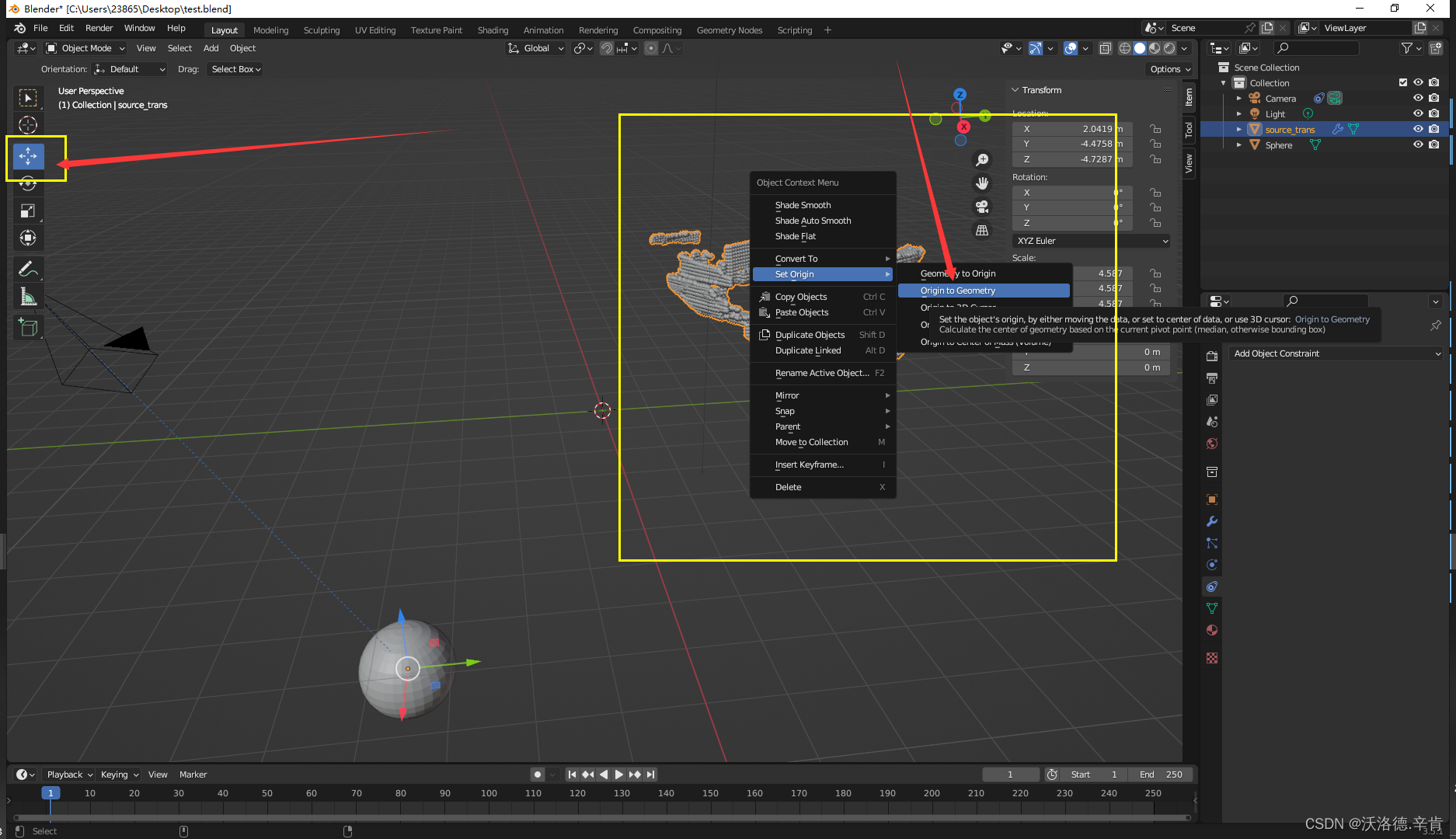
3.2 将质心归位到点云中心
选中点云,右键单击
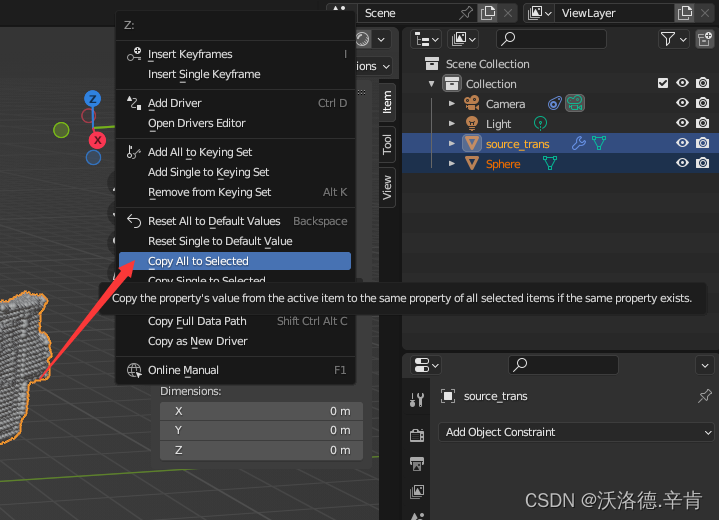
3.3 将UV球的质心和点云质心对齐
按下Ctrl,左键点击Sphere,再左键点击source_trans,松开Ctrl。
右键点击图中位置。
3.4 关闭对球的渲染

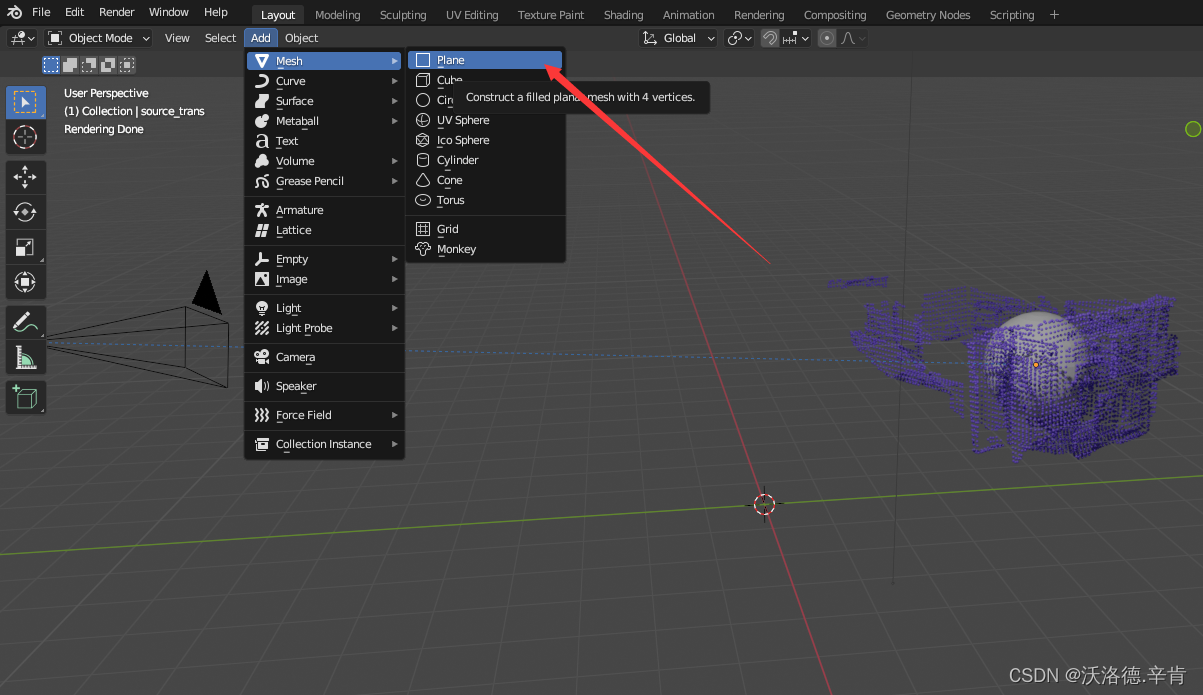
六、添加平面,制造阴影
1.添加平面,并放大。
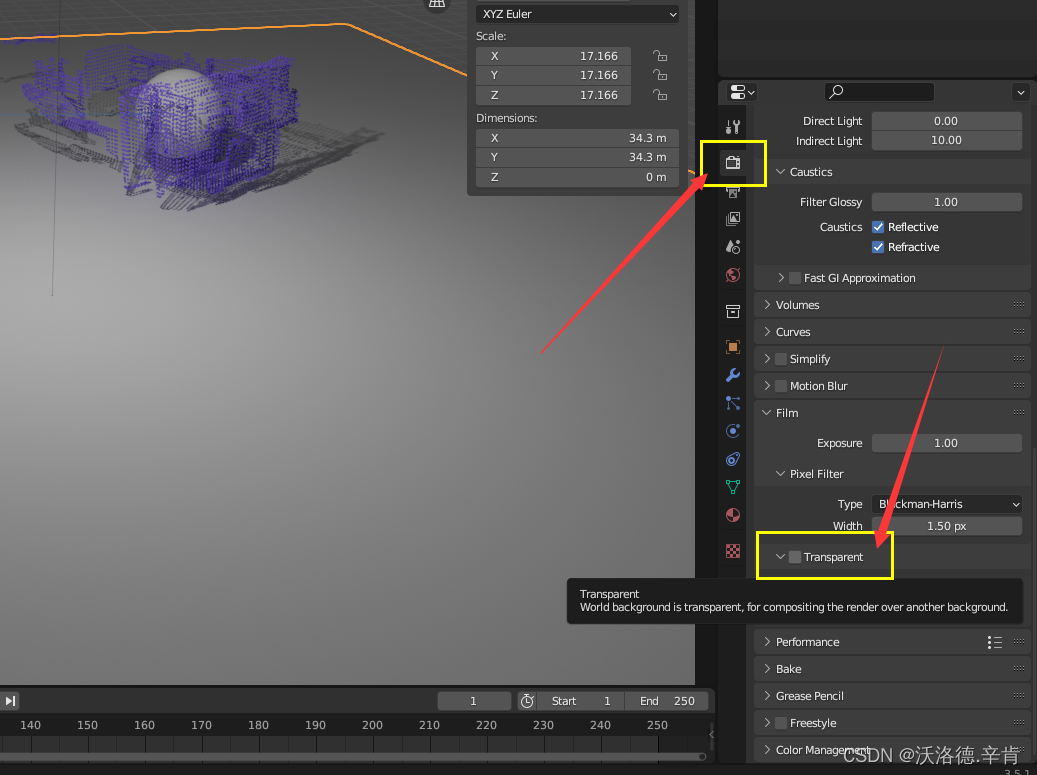
2.背景透明化
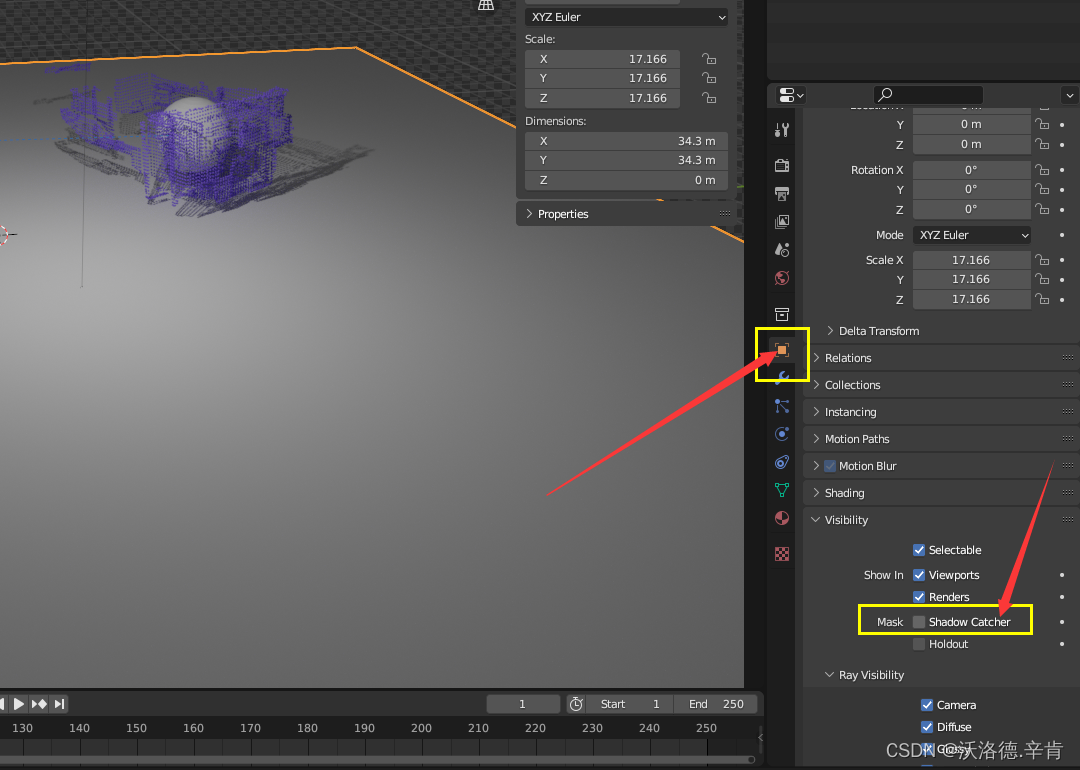
3.平面透明化



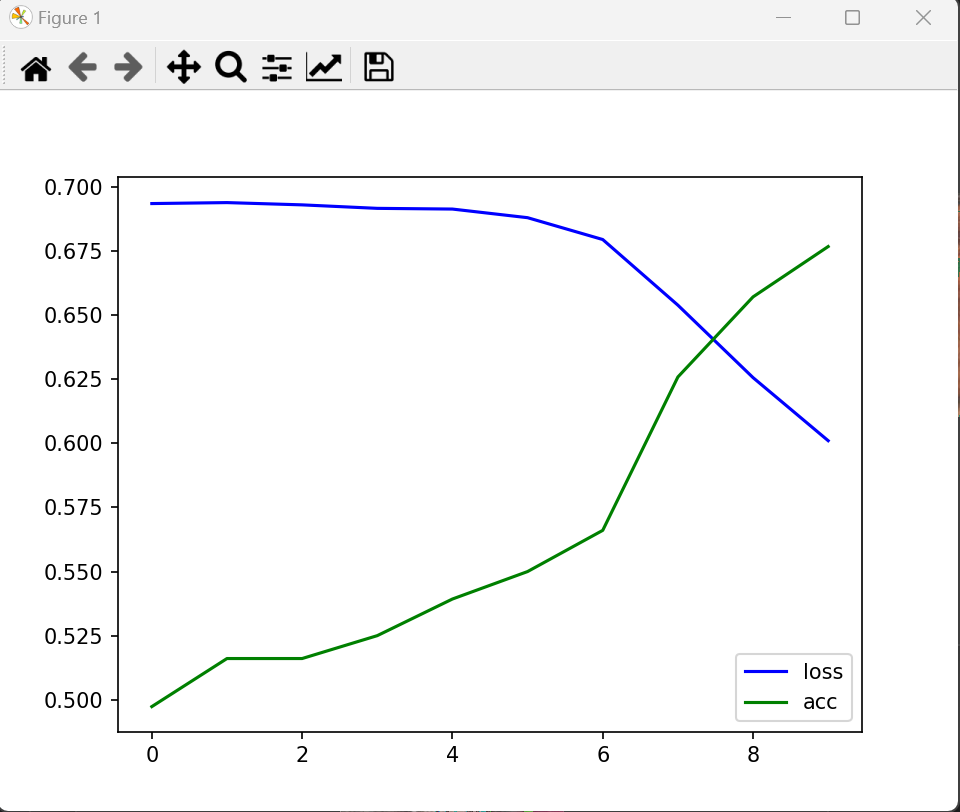
![[github-100天机器学习]day1 data preprocessing](https://img-blog.csdnimg.cn/34af6683dccc48caa24fd20ecaceacbf.png)