PyTorch示例——ResNet34模型和Fruits图像数据 前言 导包 数据探索查看 数据集构建 构建模型 ResNet34 模型训练 绘制训练曲线
ResNet34模型,做图像分类 数据使用水果图片数据集,下载见Kaggle Fruits Dataset (Images) Kaggle的Notebook示例见 PyTorch——ResNet34模型和Fruits数据 下面见代码 from PIL import Image
import os
import random
import matplotlib. pyplot as plt
import torch
from torch import nn
from torch. utils. data import Dataset, DataLoader
from torch. nn import functional as F
from torchvision import transforms as T
from torchvision. datasets import ImageFolder
import tqdm
path = "/kaggle/input/fruits-dataset-images/images"
fruit_path = "apple fruit"
apple_files = os.listdir(path + "/" + fruit_path)Image.open(path + "/"+fruit_path+"/" + apple_files[2])
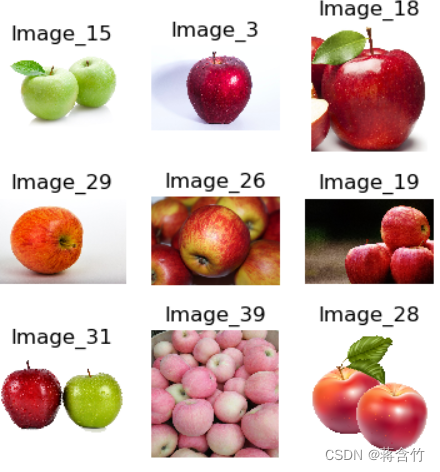
def show_images ( n_rows, n_cols, x_data) : assert n_rows * n_cols <= len ( x_data) plt. figure( figsize= ( n_cols * 1.5 , n_rows * 1.5 ) ) for row in range ( n_rows) : for col in range ( n_cols) : index = row * n_cols + colplt. subplot( n_rows, n_cols, index + 1 ) plt. imshow( x_data[ index] [ 0 ] , cmap= "binary" , interpolation= "nearest" ) plt. axis( "off" ) plt. title( x_data[ index] [ 1 ] ) plt. show( ) def show_fruit_imgs ( fruit, cols, rows) : files = os. listdir( path + "/" + fruit) images = [ ] for _ in range ( cols * rows) : file = files[ random. randint( 0 , len ( files) - 1 ) ] image = Image. open ( path + "/" + fruit + "/" + file ) label = file . split( "." ) [ 0 ] images. append( ( image, label) ) show_images( cols, rows, images)
show_fruit_imgs( "apple fruit" , 3 , 3 )
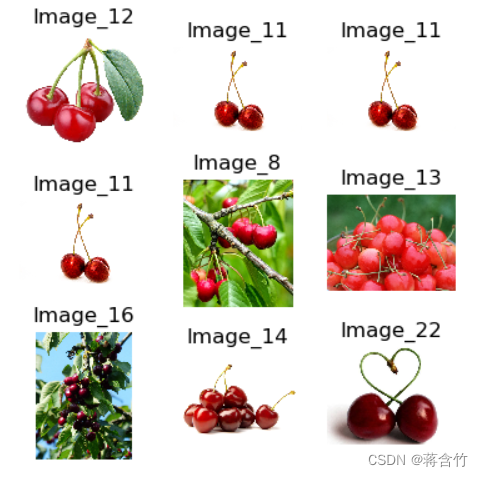
show_fruit_imgs( "cherry fruit" , 3 , 3 )
直接使用ImageFolder加载数据,按目录解析水果类别 transforms = T. Compose( [ T. Resize( 224 ) , T. CenterCrop( 224 ) , T. ToTensor( ) , T. Normalize( mean= [ 5. , 5. , 5. ] , std= [ .5 , .5 , .5 ] )
] ) train_dataset = ImageFolder( path, transform= transforms)
classification = os. listdir( path) train_dataset[ 2 ]
(tensor([[[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],...,[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.]],[[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],...,[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.]],[[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],...,[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.],[-8., -8., -8., ..., -8., -8., -8.]]]),0)
class ResidualBlock ( nn. Module) : def __init__ ( self, in_channels, out_channels, stride= 1 , shortcut= None ) : super ( ) . __init__( ) self. conv1 = nn. Conv2d( in_channels, out_channels, kernel_size= ( 3 , 3 ) , stride= stride, padding= 1 , bias= False ) self. bn1 = nn. BatchNorm2d( out_channels) self. conv2 = nn. Conv2d( out_channels, out_channels, kernel_size= ( 3 , 3 ) , stride= 1 , padding= 1 , bias= False ) self. bn2 = nn. BatchNorm2d( out_channels) self. right = shortcutdef forward ( self, X) : out = self. conv1( X) out = self. bn1( out) out = F. relu( out, inplace= True ) out = self. conv2( out) out = self. bn2( out) residual = self. right( X) if self. right else Xout += residualout = F. relu( out) return out
class ResNet34 ( nn. Module) : def __init__ ( self) : super ( ) . __init__( ) self. pre = nn. Sequential( nn. Conv2d( 3 , 64 , 7 , 2 , 3 , bias= False ) , nn. BatchNorm2d( 64 ) , nn. ReLU( inplace= True ) , nn. MaxPool2d( 3 , 2 , 1 ) ) self. layer1 = self. _make_layer( 64 , 64 , 3 , 1 , False ) self. layer2 = self. _make_layer( 64 , 128 , 4 , 2 , True ) self. layer3 = self. _make_layer( 128 , 256 , 6 , 2 , True ) self. layer4 = self. _make_layer( 256 , 512 , 3 , 2 , True ) self. fc = nn. Linear( 512 , len ( classification) ) def _make_layer ( self, in_channels, out_channels, block_num, stride, is_shortcut) : shortcut = None if is_shortcut: shortcut = nn. Sequential( nn. Conv2d( in_channels, out_channels, 1 , stride, bias= False ) , nn. BatchNorm2d( out_channels) ) layers = [ ] rb = ResidualBlock( in_channels, out_channels, stride, shortcut) layers. append( rb) for i in range ( 1 , block_num) : layers. append( ResidualBlock( out_channels, out_channels) ) return nn. Sequential( * layers) def forward ( self, X) : out = self. pre( X) out = self. layer1( out) out = self. layer2( out) out = self. layer3( out) out = self. layer4( out) out = F. avg_pool2d( out, 7 ) out = out. view( out. size( 0 ) , - 1 ) out = self. fc( out) return out
def pad ( num, target) - > str : """将num长度与target对齐""" return str ( num) . zfill( len ( str ( target) ) )
epoch_num = 50
batch_size = 32
learning_rate = 0.0005 device = torch. device( 'cuda' if torch. cuda. is_available( ) else 'cpu' )
train_loader = DataLoader( train_dataset, batch_size= batch_size, shuffle= True , num_workers= 4 )
model = ResNet34( ) . to( device)
criterion = torch. nn. CrossEntropyLoss( )
optimizer = torch. optim. Adam( model. parameters( ) , lr= learning_rate) print ( model)
ResNet34((pre): Sequential((0): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(2): ReLU(inplace=True)(3): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False))(layer1): Sequential((0): ResidualBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(1): ResidualBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(2): ResidualBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer2): Sequential((0): ResidualBlock((conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(right): Sequential((0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): ResidualBlock((conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(2): ResidualBlock((conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(3): ResidualBlock((conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer3): Sequential((0): ResidualBlock((conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(right): Sequential((0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): ResidualBlock((conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(2): ResidualBlock((conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(3): ResidualBlock((conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(4): ResidualBlock((conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(5): ResidualBlock((conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer4): Sequential((0): ResidualBlock((conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(right): Sequential((0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): ResidualBlock((conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(2): ResidualBlock((conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(fc): Linear(in_features=512, out_features=9, bias=True)
)
train_loss_list = [ ]
total_step = len ( train_loader)
for epoch in range ( 1 , epoch_num + 1 ) : model. traintrain_total_loss, train_total, train_correct = 0 , 0 , 0 train_progress = tqdm. tqdm( train_loader, desc= "Train..." ) for i, ( X, y) in enumerate ( train_progress, 1 ) : X, y = X. to( device) , y. to( device) out = model( X) loss = criterion( out, y) loss. backward( ) optimizer. step( ) optimizer. zero_grad( ) _, pred = torch. max ( out, 1 ) train_total += y. size( 0 ) train_correct += ( pred == y) . sum ( ) . item( ) train_total_loss += loss. item( ) train_progress. set_description( f"Train... [epoch { pad( epoch, epoch_num) } / { epoch_num} , loss { ( train_total_loss / i) : .4f } , accuracy { train_correct / train_total: .4f } ]" ) train_loss_list. append( train_total_loss / total_step)
Train... [epoch 01/50, loss 2.3034, accuracy 0.2006]: 100%|██████████| 12/12 [00:15<00:00, 1.32s/it]
Train... [epoch 02/50, loss 1.9193, accuracy 0.3064]: 100%|██████████| 12/12 [00:16<00:00, 1.36s/it]
Train... [epoch 03/50, loss 1.6338, accuracy 0.3482]: 100%|██████████| 12/12 [00:15<00:00, 1.30s/it]
Train... [epoch 04/50, loss 1.6031, accuracy 0.3649]: 100%|██████████| 12/12 [00:16<00:00, 1.38s/it]
Train... [epoch 05/50, loss 1.5298, accuracy 0.4401]: 100%|██████████| 12/12 [00:15<00:00, 1.31s/it]
Train... [epoch 06/50, loss 1.4189, accuracy 0.4429]: 100%|██████████| 12/12 [00:16<00:00, 1.34s/it]
Train... [epoch 07/50, loss 1.5439, accuracy 0.4708]: 100%|██████████| 12/12 [00:15<00:00, 1.31s/it]
Train... [epoch 08/50, loss 1.4378, accuracy 0.4596]: 100%|██████████| 12/12 [00:16<00:00, 1.36s/it]
Train... [epoch 09/50, loss 1.4005, accuracy 0.5348]: 100%|██████████| 12/12 [00:15<00:00, 1.32s/it]
Train... [epoch 10/50, loss 1.2937, accuracy 0.5599]: 100%|██████████| 12/12 [00:16<00:00, 1.34s/it]
......
Train... [epoch 45/50, loss 0.7966, accuracy 0.7354]: 100%|██████████| 12/12 [00:15<00:00, 1.27s/it]
Train... [epoch 46/50, loss 0.8075, accuracy 0.7660]: 100%|██████████| 12/12 [00:15<00:00, 1.33s/it]
Train... [epoch 47/50, loss 0.8587, accuracy 0.7131]: 100%|██████████| 12/12 [00:15<00:00, 1.27s/it]
Train... [epoch 48/50, loss 0.7171, accuracy 0.7604]: 100%|██████████| 12/12 [00:16<00:00, 1.35s/it]
Train... [epoch 49/50, loss 0.9715, accuracy 0.7047]: 100%|██████████| 12/12 [00:15<00:00, 1.27s/it]
Train... [epoch 50/50, loss 0.7050, accuracy 0.7855]: 100%|██████████| 12/12 [00:15<00:00, 1.33s/it]
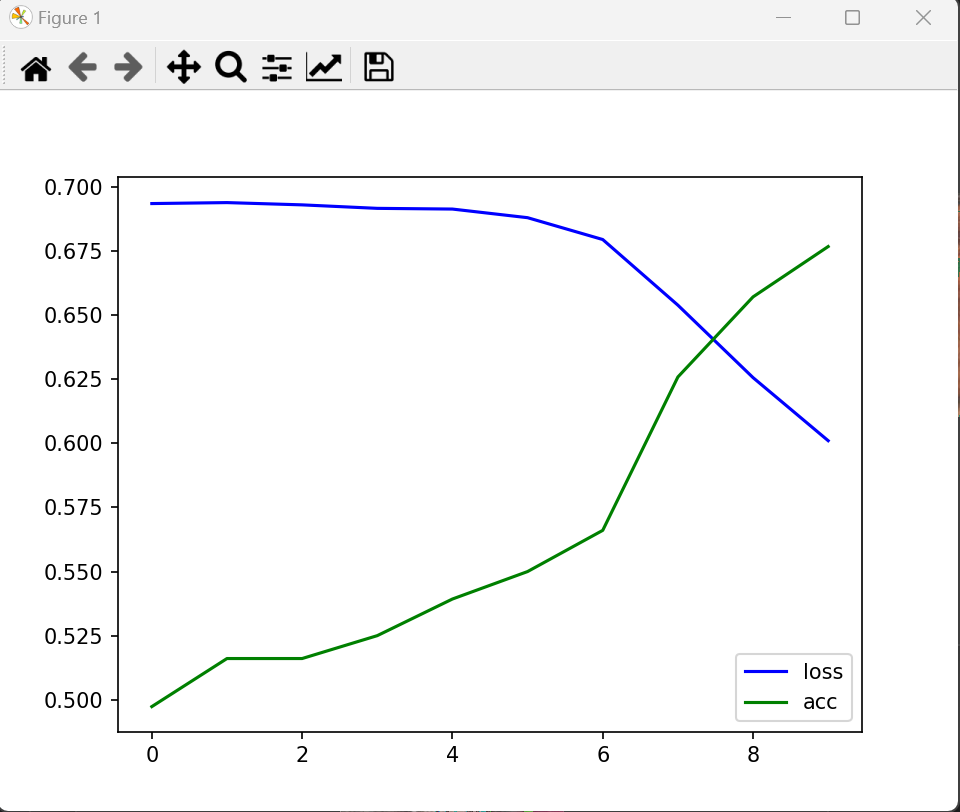
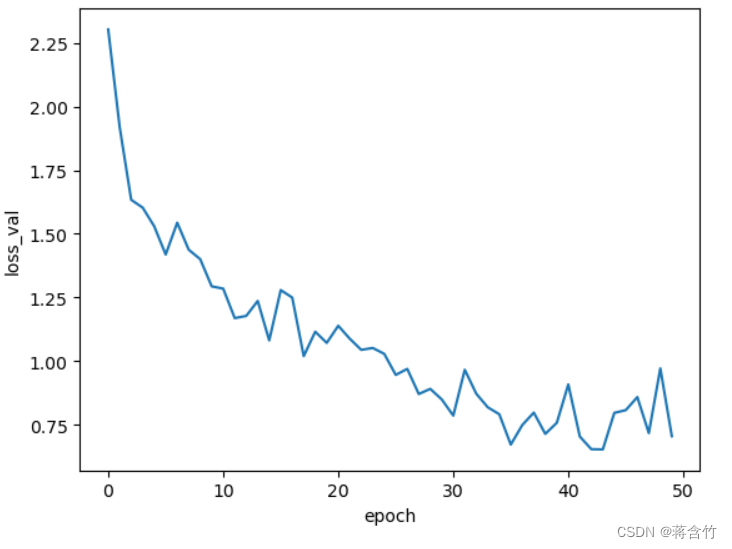
plt. plot( range ( len ( train_loss_list) ) , train_loss_list)
plt. xlabel( "epoch" )
plt. ylabel( "loss_val" )
plt. show( )

![[github-100天机器学习]day1 data preprocessing](https://img-blog.csdnimg.cn/34af6683dccc48caa24fd20ecaceacbf.png)