BGAPI SDK获取图像微秒级时间和FrameID
- Baumer工业相机
- Baumer工业相机FrameID技术背景
- 一、FrameID是什么?
- 二、使用BGAPI SDK获取图像微秒时间和FrameID步骤
- 1.获取SDK图像微秒级时间
- 2.获取SDK图像FrameID
- Baumer工业相机使用微秒级时间和FrameID保存的用处
- Baumer工业相机使用微秒级时间和FrameID保存的行业应用
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer工业相机中在一些需要同步的工业相机应用中,时间戳的准确性至关重要。BGAPI SDK可以提供一个精确的时钟源,以同步多个相机机并确保准确的时间戳。尤其是FrameID可以用于跟踪和识别每一帧,以便进行分析、处理或储存。
Baumer工业相机精确获取图像时间和FrameID技术背景
若要获取工业相机SDK获取图像的微秒时间和FrameID,通常需要一个支持硬件触发的相机和一个允许你访问时间戳和FrameID信息的软件API。
1. 硬件触发: 许多工业相机支持硬件触发,这允许你将相机的采集与外部触发信号同步。这可以帮助确保在你需要的确切时刻捕获图像,并将延迟或抖动降到最低。
2. 时间标记: 当图像被采集时,相机的硬件或软件通常会记录一个时间戳,表明曝光开始或结束的时间。这个时间戳可以用来计算捕获图像的精确时间。
3.FrameID:随着时间戳的出现,相机也可能为每一帧被捕获的图像分配一个独特的标识符。这可以帮助你跟踪哪些图像是按顺序拍摄的,特别是在你以高帧率获取图像时。
4. SDK API: 为了访问工业相机的时间戳和帧ID信息,你通常会使用相机制造商提供的SDK API。此API可能允许你设置摄像机的硬件触发,指定时间戳和帧ID的格式,并检索数据
一、工业相机FrameID是什么?
工业相机的帧标识(Frame Identifier)是分配给相机拍摄的每一帧或图像的唯一标识。
它用于跟踪和识别每一帧,以便进行分析、处理或储存。帧标识通常包括帧号、采集日期和时间、相机识别号和其他相关元数据等信息。
二、使用BGAPI SDK获取图像微秒时间和FrameID
1.引用合适的类文件
代码如下(示例):
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
using BGAPI2;
using System.Runtime.InteropServices;
using System.IO;
using CSCameraDemo.Properties;
using System.Globalization;
using WindowsFormsApplication1;
using System.Threading.Tasks;
using System.Threading;
using System.Drawing.Imaging;2.获取SDK图像FrameID和微秒级别时间
代码如下(示例):
// 获取系统时间,精确到毫秒
string strtime = DateTime.Now.ToString("yyyyMMddhhmmssfff");
#region//获取当前FrameID
FrameIDInt = (int)mBufferFilled.FrameID;
OnNotifySetFrameID(FrameIDInt.ToString());
#endregion3.BGAPI SDK在图像回调中获取微秒级和FrameID信息保存图像
代码如下(示例):
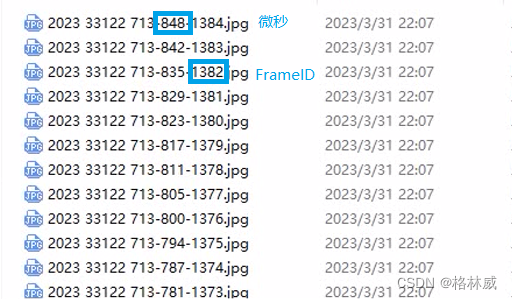
void mDataStream_NewBufferEvent(object sender, BGAPI2.Events.NewBufferEventArgs mDSEvent){try{BGAPI2.Buffer mBufferFilled = null; mBufferFilled = mDSEvent.BufferObj;if (mBufferFilled == null){MessageBox.Show("Error: Buffer Timeout after 1000 ms!");}else if (mBufferFilled.IsIncomplete == true){//MessageBox.Show("Error: Image is incomplete!");//queue buffer againmBufferFilled.QueueBuffer();}else{#region//获取当前FrameIDFrameIDInt = (int)mBufferFilled.FrameID;OnNotifySetFrameID(FrameIDInt.ToString());#endregion//将相机内部图像内存数据转为bitmap数据System.Drawing.Bitmap bitmap = new System.Drawing.Bitmap((int)mBufferFilled.Width, (int)mBufferFilled.Height, (int)mBufferFilled.Width,System.Drawing.Imaging.PixelFormat.Format8bppIndexed, (IntPtr)((ulong)mBufferFilled.MemPtr + mBufferFilled.ImageOffset));#region//Mono图像数据转换。彩色图像数据转换于此不同System.Drawing.Imaging.ColorPalette palette = bitmap.Palette;int nColors = 256;for (int ix = 0; ix < nColors; ix++){uint Alpha = 0xFF;uint Intensity = (uint)(ix * 0xFF / (nColors - 1));palette.Entries[ix] = System.Drawing.Color.FromArgb((int)Alpha, (int)Intensity, (int)Intensity, (int)Intensity);}bitmap.Palette = palette;#endregion//回调函数保存图像功能if (bSaveImg){//使用bitmap自带函数保存string strtime = DateTime.Now.ToString("yyyyMMddhhmmssfff");string saveimagepath = pImgFileDir + "\\" + strtime +"-" +FrameIDInt +".jpg";bitmap.Save(saveimagepath, System.Drawing.Imaging.ImageFormat.Bmp); bSaveImg = false;//变量控制单次保存图像}#region//bitmap的图像数据复制pBitmapBitmap clonebitmap = (Bitmap)bitmap.Clone();BitmapData data = clonebitmap.LockBits(new Rectangle(0, 0, clonebitmap.Width, clonebitmap.Height), ImageLockMode.ReadOnly, clonebitmap.PixelFormat);clonebitmap.UnlockBits(data);pBitmap = clonebitmap;#endregion#region//将pBitmap图像数据显示在UI界面PictureBox控件上prcSource.X = 0;prcSource.Y = 0;prcSource.Width = (int)mBufferFilled.Width;prcSource.Height = (int)mBufferFilled.Height;System.Drawing.Graphics graph = System.Drawing.Graphics.FromHwnd(pictureBoxA.Handle);graph.DrawImage(pBitmap, prcPBox, prcSource, GraphicsUnit.Pixel);#endregionclonebitmap.Dispose(); //清除临时变量clonebitmap所占内存空间mBufferFilled.QueueBuffer();}}catch (BGAPI2.Exceptions.IException ex){{string str2;str2 = string.Format("ExceptionType:{0}! ErrorDescription:{1} in function:{2}", ex.GetType(), ex.GetErrorDescription(), ex.GetFunctionName());MessageBox.Show(str2);}}return;}Baumer工业相机图像使用微秒级时间和FrameID保存效果
工业相机图像使用微秒级时间和FrameID的用处
使用微秒计时和FrameID的工业相机图像可用于各种目的,如:
1. 测量高速运动或快速移动的物体 - 微秒计时和FrameID可以精确测量运动的持续时间和速度。
2. 制造过程中的质量控制和检查 - 工业相机拍摄的高分辨率图像可用于缺陷检测、表面检查和产品验证。
3. 科学和工程领域的研究和开发 - 具有微秒级计时和FrameID的工业相机可以高速捕捉数据,为科学研究和工程实验提供精确的测量。
4. 交通监测和监控 - 工业相机可以高速和准确地捕捉移动的车辆、行人和其他物体的图像,使其适合用于交通监测和监控。
5. 体育分析和性能测量 - 工业相机上的微秒计时和FrameID可用于实时捕捉和分析运动员或体育设备的运动,为训练和优化提供宝贵的见解。
总的来说,带有微秒计时和FrameID的工业相机是精密测量、质量控制、科学研究以及在各种行业和应用中进行实时监测和分析的宝贵工具。
工业相机图像使用微秒时间和FrameID的行业应用
在工业相机图像中使用微秒时间和FrameID可以有各种行业应用,包括:
1. 制造业: 工业相机图像可用于监测和分析生产线,使制造商能够提高效率,减少缺陷,并提高整体生产力。微秒时间和FrameID的使用可以帮助跟踪特定组件或装配的进展,并确定潜在的问题或瓶颈。
2. 质量控制:高速工业相机能够以非常高的帧率捕捉图像,从而能够精确检查产品和部件的缺陷或异常。微秒级时间和FrameID的使用可以帮助确保准确和一致的测量和检查结果。
3. 医学成像: 高速工业相机可用于医疗成像应用,如超声、内窥镜和显微镜。高帧率和精确的图像时间可以使临床医生捕捉到动态过程的详细图像,并确定组织或细胞行为的微妙变化。
4. 航空航天和国防:工业相机图像可用于监测和分析航空航天和国防应用中的复杂系统,如飞机发动机、导弹制导系统和卫星部件。微秒级时间和FrameID的使用可以帮助实时识别潜在的故障或性能问题。
总的来说,在工业相机图像中使用微秒级时间和FrameID可以在各行业中实现广泛的应用,为分析和决策提供精确和可靠的数据。
![[C++笔记]初步了解STL,string,迭代器](https://img-blog.csdnimg.cn/6687c2c8fdd24eaaac287c971d2436b8.png)