目 录
摘 要 I
Abstract II
第1章 引言 1
1.1研究背景及意义 1
1.2国内外研究现状 2
第2章 总体方案的确定 4
2.1方案拟定 4
2.1.1机械结构 4
2.1. 2控制工艺要求 5
2.1. 3总体方案 5
2.2 设计参数 7
第3章 视觉检测工作台机械系统设计 8
3.1 X-Y数控工作台总体方案的确定 8
3.2 机械传动部件的计算与选型 9
3.2.1滚动导轨副的计算、选择 9
3.2.2滚珠丝杠计算、选择 10
3.2.3齿轮计算、设计 14
3.3 工作台控制系统的设计 15
3.3.1 系统运动方式的确定 16
3.3.2 伺服系统的选择 16
3.3.3 计算机系统的选择 16
3.3.4 X—Y工作台的传动方式 16
3.4 步进电动机驱动电源的选用 17
3.4.1步进电机惯性负载的计算 17
3.4.2步进电机的选用 18
第4章 视觉检测工作台视觉检测系统设计 20
4.1 手动升降杆Z轴设计 20
4.2 工业相机选用 20
4.3 视觉软件语句编写 21
4.3.1 程序结构 21
4.3.2 主程序分析 22
4. 3.3 急停子程序 24
4. 3.4 复位子程序 25
4. 3.5 手动子程序 25
4. 3.6 自动子程序 26
4.3. 7 报警子程序 27
第5章 三维建模数据 29
5. 1 新建项目 29
5.1.1 添加新的驱动程序 30
5.1.2 建立新驱动程序的链接 31
5. 3 建立变量 32
5. 4 初始画面 33
5. 5 运行画面 33
5. 6 报警画面 34
5. 7 参数画面 35
5.8 视觉测量测试 36
第6章 结 论 38
致 谢 39
参考文献 40
第2章 总体方案的确定
2.1方案拟定
视觉检测工作台控制系统的设计的主要研究内容包括:机械设计,控制系统硬件设计和上位界面软件设计等。故需对本设计实施方案在控制器、控制工艺、驱动设备、上位监控软件及网络通信方式选择进行详细分析。
2.1.1机械结构
视觉检测工作台系统主要包括传输机构、升降机构、水平移动机构等机械机构。根据项目需求,其中传输机构主要负责传输待检测工件,可以使用普通电机皮带传输。所以需要设计传送装置,而升降机构与水平移动机构的主要工作是驱动升降机机构和水平机构将摄像头移动到指定位置,可以使用丝杠滑杆结构实现。又因要求摄像头移动位置要精确,因此可以使用步进电机或伺服电机进行驱动。机械结构示意图如图2-1所示。
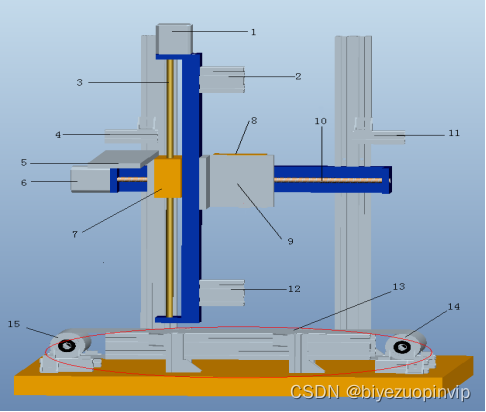
1、步进电机1 2、上限位开关 3、升降导轨丝杠 4、左限位开关 5、摄像头安装位置
6、步进电机2 7、升降滑块 8、水平移动滑块 9、连接板 10、水平导轨丝杠
11、右限位开关 12、下限位开关 13、传输装置 14、头辊 15、尾辊
图2-1机械机构示意图
2.1. 2控制工艺要求
视觉检测工作台包括传输机构,升降机构,水平移动机构,机器视觉设备和控制系统等。机器视觉设备包括摄像头,光源(可选)和计算机。
传输机构负责传输待检测工件,可以使用普通电机皮带传输。驱动升降机机构和水平机构将摄像头移动到指定位置,可以使用丝杠滑杆结构实现。由于要求摄像头移动位置要精确,因此可以使用步进电机或伺服电机进行驱动。计算机需要显示摄像头当前的位置,并通过控制系统实现对电机的控制。
(a)启动:在系统处于停止状态时,按下控制面板上的SB1系统启动按钮,若摄像头不在初始位置,则系统启动指示灯HL1闪亮,若摄像头位于初始位置,则启动指示灯HL1常亮。
(b)复位:系统启动后,按下复位按钮SB2,摄像头回复初始位置。
(c)模式选择:系统启动并复位成功后,由SA1实现就地/远程模式的选择,并通过相应的指示灯进行模式指示。
(d)就地控制:系统启动且摄像头回复初始位置后,可通过控制面板上的手动点动按钮调节摄像头位置,通过控制面板上的启停按钮实现传送带的启停传输。其摄像头具体位置可在上位监控系统中进行显示。
(e)远程控制:摄像头具体位置可在上位监控系统中进行显示。光电传感器故障或运行故障,在上位监控系统中均能实现报警功能。在系统启动且摄像头回复到初始位置后,可以通过上位监控系统中的手动模式实现摄像头位置的点动调节,而在自动模式下在参数画面中放置的输入输出域中输入移动量,点击确定按钮可对摄像头进行精确定位,以及对传送带进行远程启停控制。
2.1. 3总体方案
视觉检测工作台控制系统实现对摄像头的位置进行自动调节和高精度定位。本毕业设计的实施方案在控制器、控制工艺、驱动设备、上位监控软件及网络通信方式选择进行以下分析。
(1)驱动设备选型
本课题传输机构、升降机构、水平移动机构等机械机构,所需机械运动要靠驱动设备来实现,直流电机、交流电机、伺服电机、步进电机等都是可供选择的驱动设备。其中,传输机构主要负责传输待检测工件,将待检测工件运送到指定位置,所以传送装置可以采用价格低廉的直流电机来进行件的传输,而升降机构与水平移动机构的主要工作是驱动升降机机构和水平机构将摄像头精确移动到指定位置,因此可以使用步进电机或伺服电机进行驱动。而步进电机与伺服电机相比价格低廉,且其控制精度足以满足课题研究需求,因而在此设计中选择可以通过控制脉冲个数来控制角位移量以达到准确定位的目的。
(2)控制器选择
目前市场上的机器视觉检测系统主要分为PLC系统及单片机系统,而PLC凭借着可靠的、分立逻辑和简单的模拟I/O且系统构成灵活,扩展容易,并能与上位机组成复杂的控制系统,实现生产过程的自动化;编程简单,使用方便,可采用简明的逻辑图、语句表、梯形图等编程语言,而无需计算机知识,因此现场调试容易,系统开发周期短。另外PLC也可在线进行修改程序,改变控制方案也不用拆动硬件。因此本课题选用PLC作为控制系统。
PLC的品牌众多,有国外著名品牌西门子、三菱、通用、施耐德等,也有国内生产的台达、永宏、深圳合信、德维深、和利时、淅大中控、江苏信捷等。而相对于其他品牌的PLC,西门子PLC的模拟量模块价格便宜,开放性好,程序简单,性能质量好,支持多种通信协议,产品售前售后服务到位,适用多种人机界面和监控组态软件利于多厂家设备的通讯与集成,西门子具有很多功能块,减轻了设计人员的编程负担。本设计选用西门子品牌的S7系列的PLC,而本课题输入及输出量较多故选取西门子S7-300为机器视觉检测台自动控制系统的控制器。
(3)上位监控软件选择
目前市场上的上位监控软件有iFIX、组态王、InTouch、WinCC等等。其中,iFIX功能强大,但是操作繁琐,适用于大型的或较复杂的控制系统;组态王设计简洁直观,适应性强;InTouch的单功能较简单,但在分布式结构、大型应用上能力较弱;而WinCC的功能强大,应用灵活,扩展功能开放简易,而且与西门子PLC的方便集成,有丰富的功能选件,更适用于该课题。本文转载自http://www.biyezuopin.vip/onews.asp?id=13460综上所述,最终选用WinCC作为控制系统的上位监控软件。