阿丘科技计算视觉库 AQCV 专为开发人员的工业机器视觉应用而设计,有较强的灵活性。AQCV 允许开发
人员能够高效开发项目需要的程序,可以配合AIDI,为实际检测应用赋能。
基础图像处理:滤波、几何变换、极坐标展开
特征分析:Blob分析、轮廓分析、骨架提取
测量工具:相机标定、找线、找圆、拟合工具、几何测量
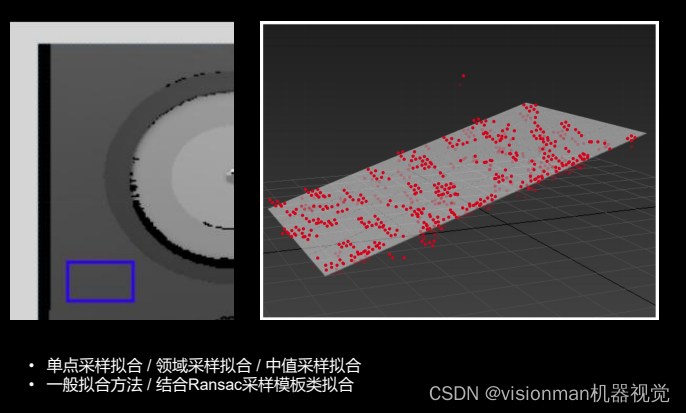
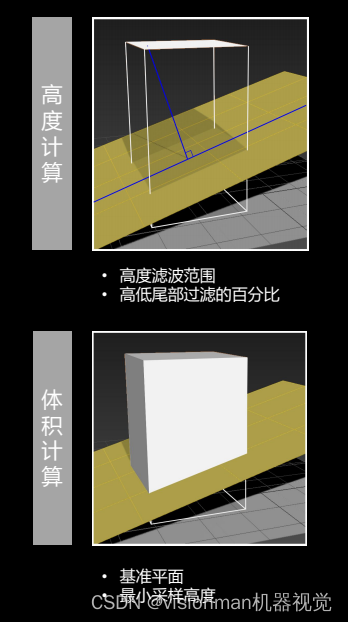
3D图像:平面矫正、平面与球体拟合、高度计算、体积计算
• 滤波是通过不同的核与图像的每一个位置进行相关(或卷积)操作,可以使图像产生不同的效果。目前支持的滤波有高斯模糊,中值滤波,Sobel算子,Canny算子以及自定义卷积核
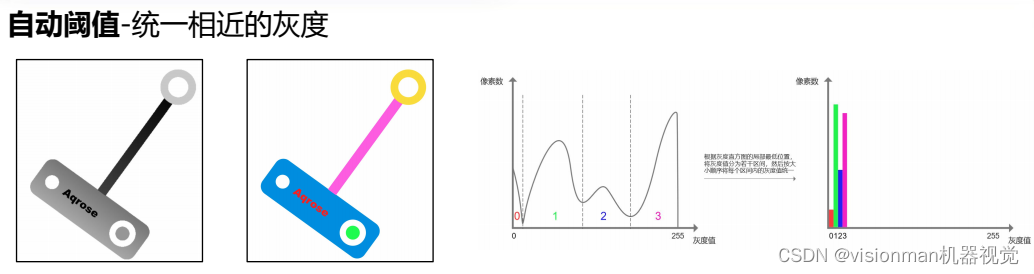
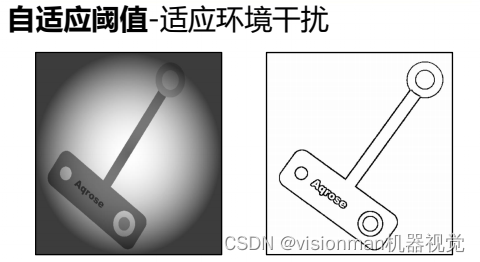
• 阈值处理是用一个(或一组)固定(或自适应)的参数将图像分成不同区域的过程,一般作为其他图像算法的预处理。aqcv中有三种不同的阈值处理:固定阈值,自适应阈值和自动阈值
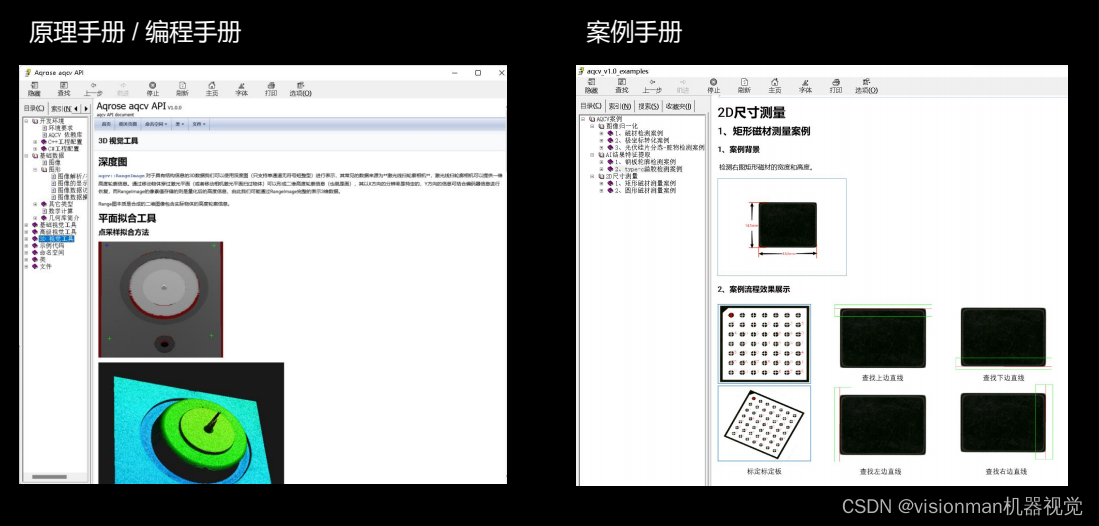
由于环境不同,工业产线图片常常不能统一角度、大小,位置和形态变化,在预处理阶段常常需要做图片形态的归一化,服务后续的AI检测或是测量AQCV支持常用的几何变换,方便用户根据实际情况具体调整。如右侧的案例中,先通过AQCV算子计算出外接矩形旋转角度,然后通过平移变换将磁材中心与图像中心重合,再进行旋转操作,最后将其余背景填充为白色,达到归一化的目的

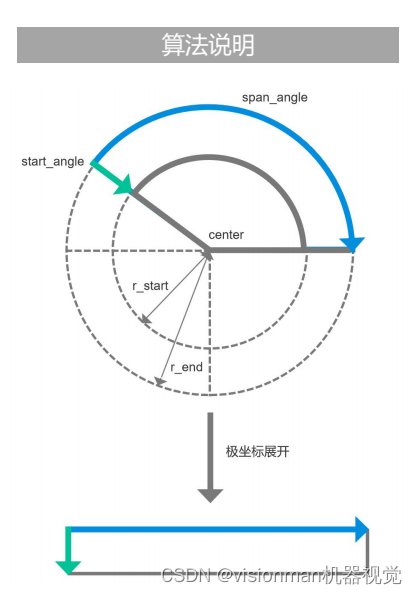
对于圆环形或有弧度的图像的信息,AI直接处理难度很大,需要先通过极坐标展开, 展开为平面,以便于下一步分析。在AQCV中,只需要提供中心点,起始角度,角度范围,起始半径,终止半径,其余算
法自动处理,常用于轴承、螺栓、瓶盖、轮胎等
Blob(Binary large object)是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域
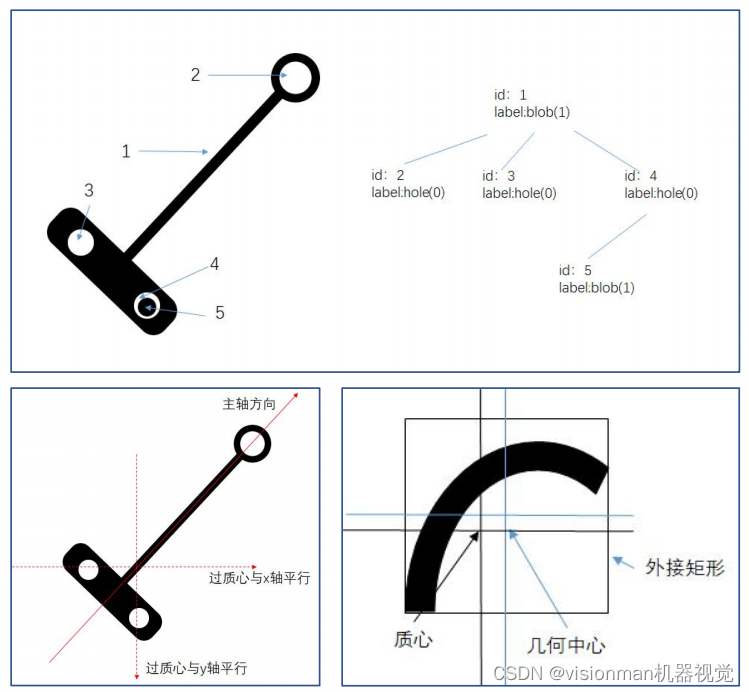
Blob(Binary large object)是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域

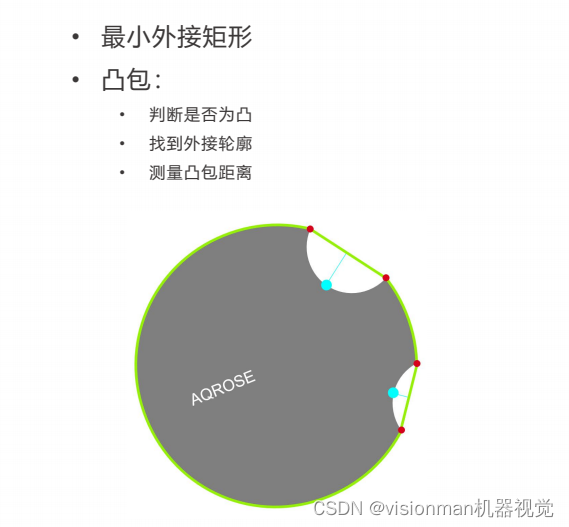
轮廓分析:
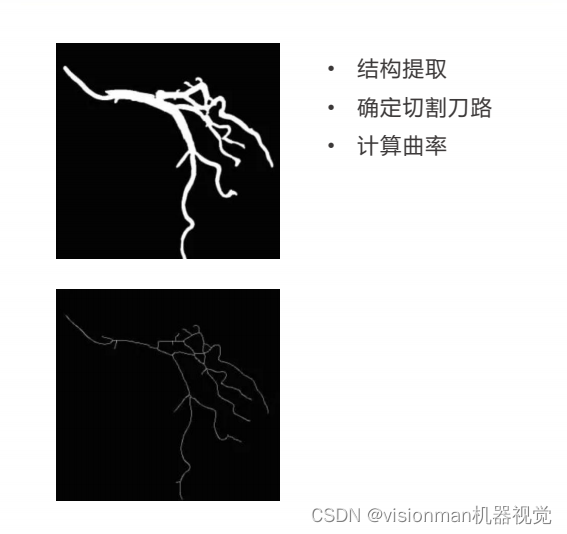
骨架:
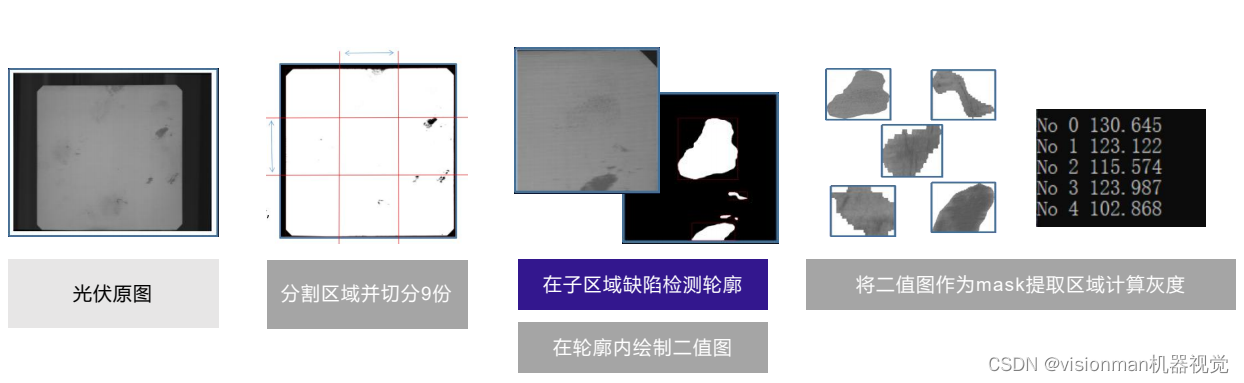
AIDI+AQCV案例:光伏硅片分选-脏污检测
单相机标定流程
- 构建标定板模型
- 构建相机模型和相机内参模型
- 构建标定器模型
- 向标定器中添加图像,一般情况下会提前采
集不同视角下图像 - 执行标定
- 分析标定结果

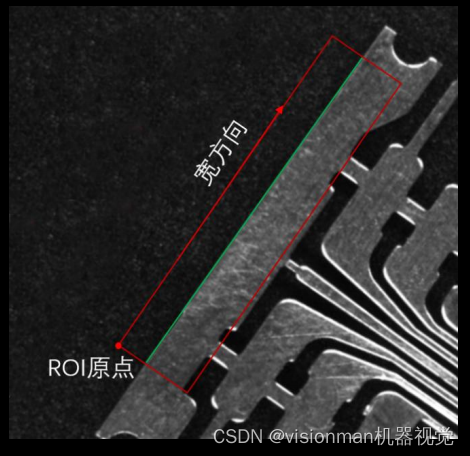
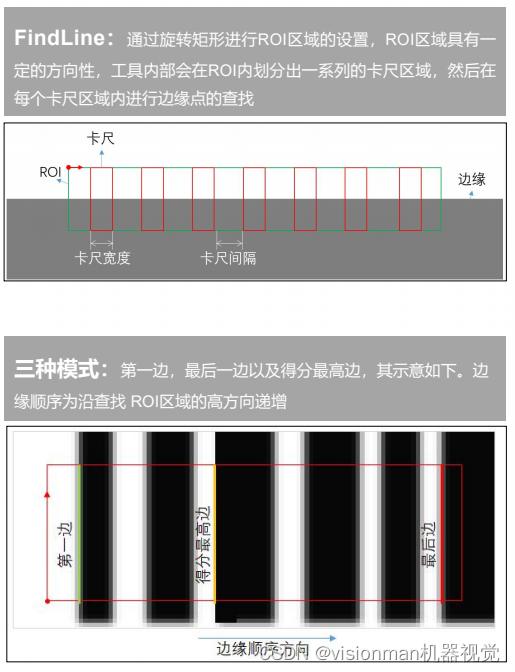
项目中的测量与定位,往往是从寻找关键直线开始
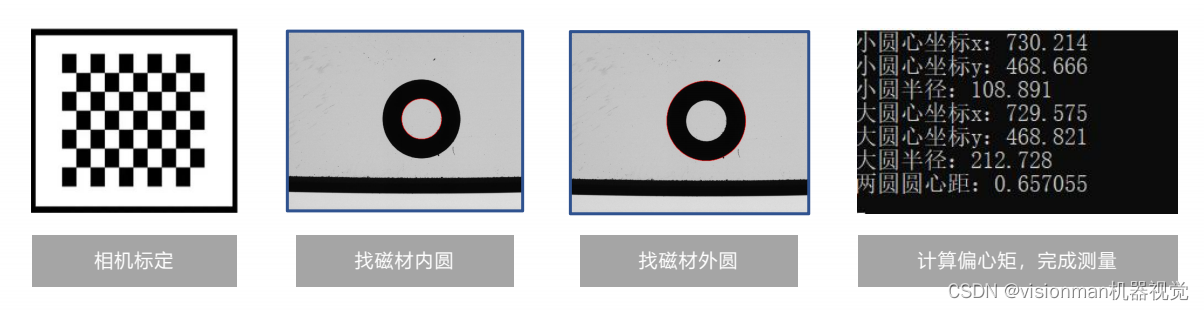
查找圆工具用于图像中提取中圆,输出其圆的属性。当前找圆工具也可支持找圆弧


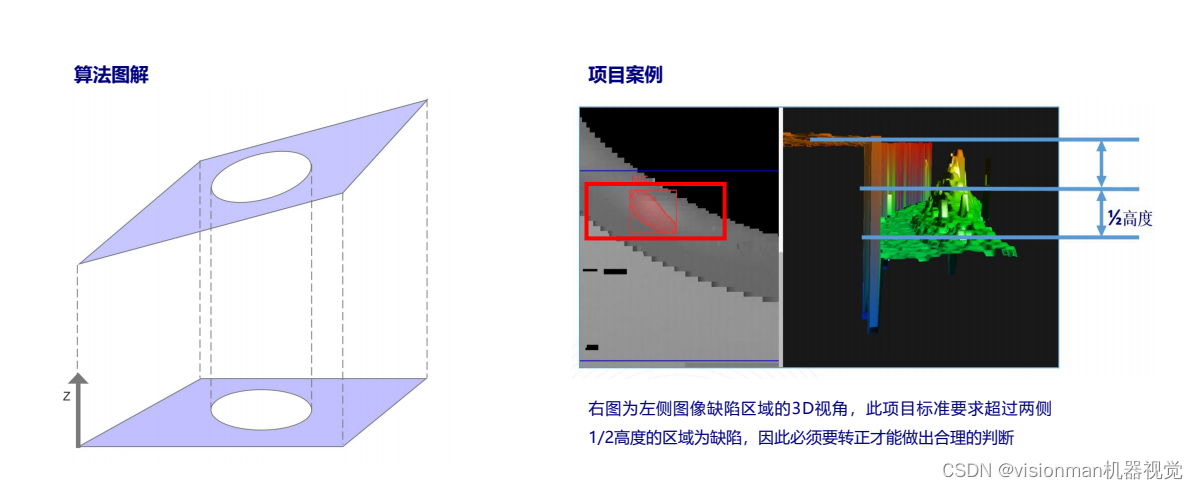
3D平面纠正-高度变换功能不改变原range图的x,y位置只是高度值进行了变换
AQCV支持基本的3D图的图形拟合,测量