基于FPGA的图像边缘检测
- 一、图像处理算法
- 1.灰度转换
- 2.高斯滤波
- 3.二值化
- 4.Sobel
- 二、项目框架
- 1.摄像头配置模块
- 2.图像处理模块
- 3.数据缓存模块
- 4.其它模块
- 三、部分代码
- 1.数据采集模块
- 2.读写控制模块
- 四、参考
- 五、源码
简介:基于FPGA,摄像头实时采集图像数据,经过图像处理、乒乓缓存,通过vga显示
工具:Quartus 18.1
开发板:AIGO_C4MB_V11(CycloneIV-EP4CE6F17C8)
摄像头:OV5640
一、图像处理算法
1.灰度转换
RGB颜色模型是由红(Red)、绿(Green)、蓝(Blue)三种基色以不同的比例叠加而成;而且每个像素分量(R、G、B)的值分布在0—255范围内,三种基色以不同的比例混合,能够显示出2563种颜色。 在这个项目中ov5640采集的数据是16位rgb565的数据,首先扩展为rgb888,然后进行加权求和
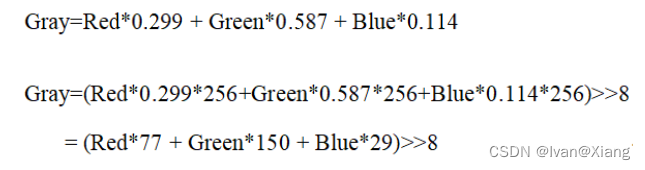
如图所示,灰度转换的公式
在灰度转换过程中,可能会因为取整操作引入噪声,所以接下来使用高斯滤波算法来去除灰度转化过程中引入的噪声
2.高斯滤波
高斯滤波本质上是一种线性平滑滤波,即对整幅图像进行加权平均的过程,每一个像素点的值都是由其本身和邻域内的其他像素点加权平均后得到
高斯滤波的具体操作是使用一个N*N卷积模板对整幅图像扫描,用模板确定的邻域内的像素加权平均值代替模板中心像素点的值
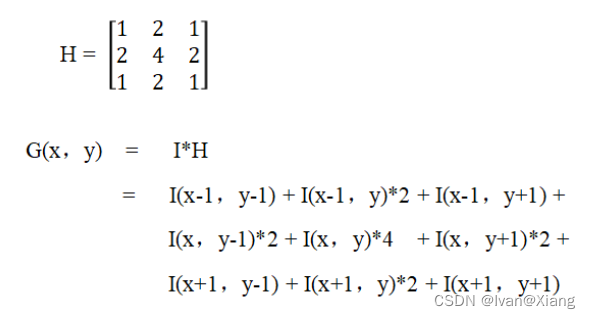
其中,I(x,y)表示原图像中坐标为(x,y)的像素值;G(x,y)表示高斯滤波之后的值
3.二值化
二值化的作用是把灰度图像的像素值设置为0或者255,即纯黑或者纯白。通过二值图像,能更好地分析物体的形状和轮廓,有利于后续使用Sobel算子检测图像的边缘
二值化有多种方法,其中最常用的就是采用阈值法进行二值化
4.Sobel
Sobel算子主要用于检测图像边缘,在物体的边缘通常都有像素的变化,反映了物体与背景之间的差异,或者两个物体之间的差异。它是一个离散差分算子,用来计算像素点上下、左右领域内像素点的加权差,根据在边缘处达到极值来检测边缘
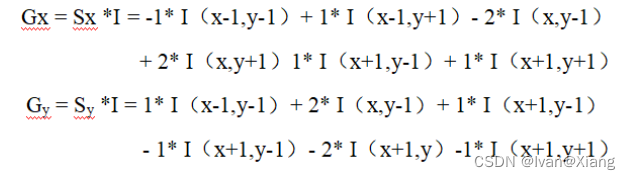
Sobel算子在水平方向和垂直方向各采用一个模板,检测各方向上的边缘,其优点是计算简单,速度快;但是对于纹理较为复杂的图像,检测效果不理想。水平方向模板Sx和垂直方向模板Sy如下
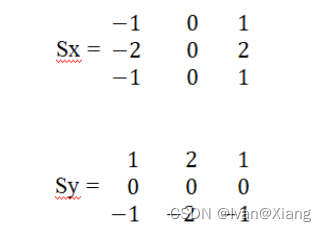
将两个算子与图像做平面卷积,即可得到水平方向与垂直方向的梯度值;若以I表示图像矩阵,Gx表示水平方向图像梯度值,Gy表示垂直方向的梯度值,则Gx与Gy可以表示如下:
二、项目框架
整个项目主要分为:
摄像头配置模块、图像处理模块、数据缓存模块、vga显示模块以及时钟管理模块
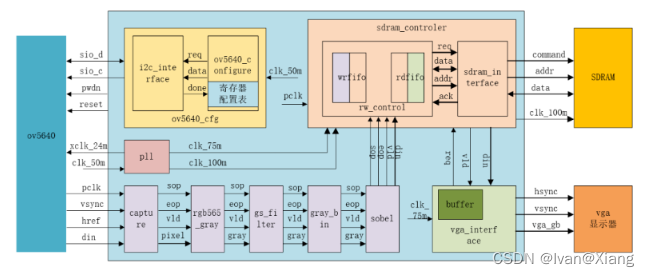
1.摄像头配置模块
摄像头配置模块负责配置摄像头各个参数,在摄像头上电后需要等待20ms。然后再通过I2C发送设备ID、写地址和数据,其中地址先发送高8位再发送低8位。这里包含摄像头时钟、图像大小、帧率以及其他和图像相关的参数,按照配置表中的参数,将摄像头配置为分辨率为1280*720像素点、RGB565数据格式、VGA时序输出;然后通过I2C协议将参数配置给摄像头的每个寄存器
2.图像处理模块
该模块完成图像数据的采集与处理;图像采集模块(capture)对摄像头输出的像素数据进行串并转换,然后给到后续的图像处理模块,依次进行灰度转换(rgb565_gray)、高斯滤(gs_filter)、二值化处理(gray_bin)、Sobel边缘检测(sobel)
3.数据缓存模块
通过乒乓缓存操作向SDRAM中读写图像数据,接口通过调用IP,主要是SDRAM读写控制逻辑(rw_control),使用两个异步FIFO跨时钟域数据处理,使用读写仲裁机制产生读写传输请求、地址等
为什么要用pp(乒乓)缓存?
如果不采用乒乓缓存,OV5640 帧率 30fps,VGA 帧率 60fps,如果摄像头输入的数据和VGA输出的数据都是连续不断的,那么刚好可以写一帧读两帧。但是一帧图像实际情况是一行行的生成和读取的,所以会出现 VGA 从SDRAM处读的上半帧是新帧,而由于SDRAM缓存的下半帧还没有被 OV5640写完,VGA 从SDRAM处读的下半帧还是旧帧,会出现错帧现象。采用乒乓缓存机制时,使用两个缓存区,写缓存区 1 时读缓存区 2,写缓存区 2 时读缓存区 1,每个缓存区存储完整的数据帧,读写隔离并且读写交替则不会出现错帧现象
为什么要读写仲裁?
仲裁:在FPGA中,当多个操作同时发出请求,容易导致操作冲突,因此我们需要根据相应的优先级来响应哪一个操作,这个过程就叫仲裁。在SDRAM中,初始化完成后,主要的功能就是突发写、突发读和自动刷新。如果同时发起写、读和刷新请求,就会出现操作冲突,从而导致SDRAM工作出错,因此这里就需要引入仲裁机制。为了简化设计,考虑将刷新与读写请求的仲裁分开考虑。由于刷新的优先级一定高于读写,因此,在底层接口中,只对读/写请求与刷新请求进行仲裁,即刷新请求的优先级一定高于读/写请求。在控制逻辑中,对读/写请求进行仲裁,保证底层接口不会同时收到读请求与写请求,从而避免底层接口中出现复杂控制
4.其它模块
vga模块就是通过vga协议将图像显示,这个非常简单,我之前的博客也写过关于vga的操作,这里就不在过多赘述
时钟管理模块则是通过pll生成时钟供SDRAM、vga、ov5640使用也没什么技术含量
三、部分代码
1.数据采集模块
`include "param.v"
module capture(input clk ,//像素时钟 摄像头输出的pclkinput rst_n ,input enable ,//采集使能 配置完成input vsync ,//摄像头场同步信号input href ,//摄像头行参考信号input [7:0] din ,//摄像头像素字节output [15:0] dout ,//像素数据output dout_sop,//包文头 一帧图像第一个像素点output dout_eop,//包文尾 一帧图像最后一个像素点output dout_vld //像素数据有效
);//信号定义reg [11:0] cnt_h ;wire add_cnt_h ;wire end_cnt_h ;reg [9:0] cnt_v ;wire add_cnt_v ;wire end_cnt_v ;reg [1:0] vsync_r ;//同步打拍wire vsync_nedge ;//下降沿reg flag ;//串并转换标志reg [15:0] data ;reg data_vld ;reg data_sop ;reg data_eop ;//计数器always @(posedge clk or negedge rst_n) begin if (rst_n==0) begincnt_h <= 0; endelse if(add_cnt_h) beginif(end_cnt_h)cnt_h <= 0; elsecnt_h <= cnt_h+1 ;endendassign add_cnt_h = flag & href;assign end_cnt_h = add_cnt_h && cnt_h == (`H_AP << 1)-1;always @(posedge clk or negedge rst_n) begin if (rst_n==0) begincnt_v <= 0; endelse if(add_cnt_v) beginif(end_cnt_v)cnt_v <= 0; elsecnt_v <= cnt_v+1 ;endendassign add_cnt_v = end_cnt_h;assign end_cnt_v = add_cnt_v && cnt_v == `V_AP-1 ;//vsync同步打拍always @(posedge clk or negedge rst_n)beginif(~rst_n)beginvsync_r <= 2'b00;endelse beginvsync_r <= {vsync_r[0],vsync};endendassign vsync_nedge = vsync_r[1] & ~vsync_r[0];always @(posedge clk or negedge rst_n)beginif(~rst_n)beginflag <= 1'b0;endelse if(enable & vsync_nedge)begin //摄像头配置完成且场同步信号拉低之后开始采集有效数据flag <= 1'b1;endelse if(end_cnt_v)begin //一帧数据采集完拉低flag <= 1'b0; endend//dataalways @(posedge clk or negedge rst_n)beginif(~rst_n)begindata <= 0;endelse begindata <= {data[7:0],din};//左移//data <= 16'b1101_1010_1111_0111;//16'hdaf7endend//data_sopalways @(posedge clk or negedge rst_n)beginif(~rst_n)begindata_sop <= 1'b0;data_eop <= 1'b0;data_vld <= 1'b0;endelse begindata_sop <= add_cnt_h && cnt_h == 2-1 && cnt_v == 0;data_eop <= end_cnt_v;data_vld <= add_cnt_h && cnt_h[0] == 1'b1;endendassign dout = data;assign dout_sop = data_sop;assign dout_eop = data_eop;assign dout_vld = data_vld;endmodule
2.读写控制模块
`include"param.v"
module sdram_ctrl (input clk ,input clk_in ,input clk_out ,input rst_n ,//数据输入input [15:0] din ,//摄像头输入像素数据input din_sop ,input din_eop , input din_vld ,//数据输出input rdreq ,//vga的读数据请求output [15:0] dout ,//输出给vga的数据output dout_vld ,//输出给vga的数据有效标志//sdram_interfaceoutput avm_write ,//输出给sdram 接口 IP 的写请求output avm_read ,//输出给sdram 接口 IP 的读请求output [23:0] avm_addr ,//输出给sdram 接口 IP 的读写地址output [15:0] avm_wrdata ,//输出给sdram 接口 IP 的写数据input [15:0] avs_rddata ,//sdram 接口 IP 输入的读数据input avs_rddata_vld ,input avs_waitrequest
);//参数定义localparam IDLE = 4'b0001,WRITE = 4'b0010,READ = 4'b0100,DONE = 4'b1000;//信号定义reg [3:0] state_c ;reg [3:0] state_n ;reg [8:0] cnt ;//突发读写计数器wire add_cnt ;wire end_cnt ;reg [1:0] wr_bank ;//写bankreg [1:0] rd_bank ;//读bankreg [21:0] wr_addr ;//写地址 行地址 + 列地址wire add_wr_addr ;wire end_wr_addr ;reg [21:0] rd_addr ;//读地址 行地址 + 列地址wire add_rd_addr ;wire end_rd_addr ;reg change_bank ;//切换bank reg wr_finish ;//一帧数据写完reg [1:0] wr_finish_r ;//同步到写侧reg wr_data_flag;//wrfifo写数据的标志reg wr_flag ;reg rd_flag ;reg flag_sel ;reg prior_flag ;wire idle2write ; wire idle2read ;wire write2done ;wire read2done ;reg [15:0] rd_data ;//rfifo读数据输出reg rd_data_vld ;wire [17:0] wfifo_data ; wire wfifo_rdreq ;wire wfifo_wrreq ;wire [17:0] wfifo_q ;wire wfifo_empty ;wire [10:0] wfifo_usedw ;wire wfifo_full ;wire [15:0] rfifo_data ;wire rfifo_rdreq ;wire rfifo_wrreq ;wire [15:0] rfifo_q ;wire rfifo_empty ;wire rfifo_full ;wire [10:0] rfifo_usedw ;//状态机always @(posedge clk or negedge rst_n)beginif(~rst_n)beginstate_c <= IDLE;endelse beginstate_c <= state_n;endendalways @(*)begincase(state_c)IDLE :begin if(idle2write)state_n = WRITE;else if(idle2read)state_n = READ;else state_n = state_c;end WRITE :begin if(write2done)state_n = DONE;else state_n = state_c;end READ :begin if(read2done)state_n = DONE;else state_n = state_c;end DONE :state_n = IDLE;default:state_n = IDLE;endcase endassign idle2write = state_c == IDLE && (~prior_flag && wfifo_usedw >= `USER_BL);assign idle2read = state_c == IDLE && prior_flag && rfifo_usedw <= `RD_UT;assign write2done = state_c == WRITE && end_cnt;assign read2done = state_c == READ && end_cnt;//计数器always @(posedge clk or negedge rst_n)beginif(!rst_n)begincnt <= 0;endelse if(add_cnt)beginif(end_cnt)cnt <= 0;elsecnt <= cnt + 1;endendassign add_cnt = (state_c == WRITE | state_c == READ) & ~avs_waitrequest; assign end_cnt = add_cnt && cnt== `USER_BL-1; /************************读写优先级仲裁*****************************/
//rd_flag ;//读请求标志always @(posedge clk or negedge rst_n)begin if(!rst_n)beginrd_flag <= 0;end else if(rfifo_usedw <= `RD_LT)begin rd_flag <= 1'b1;end else if(rfifo_usedw > `RD_UT)begin rd_flag <= 1'b0;end end//wr_flag ;//写请求标志always @(posedge clk or negedge rst_n)begin if(!rst_n)beginwr_flag <= 0;end else if(wfifo_usedw >= `USER_BL)begin wr_flag <= 1'b1;end else begin wr_flag <= 1'b0;end end//flag_sel ;//标记上一次操作always @(posedge clk or negedge rst_n)begin if(!rst_n)beginflag_sel <= 0;end else if(read2done)begin flag_sel <= 1;end else if(write2done)begin flag_sel <= 0;end end//prior_flag ;//优先级标志 0:写优先级高 1:读优先级高 仲裁读、写的优先级always @(posedge clk or negedge rst_n)begin if(!rst_n)beginprior_flag <= 0;end else if(wr_flag && (flag_sel || (~flag_sel && ~rd_flag)))begin //突发写优先级高prior_flag <= 1'b0;end else if(rd_flag && (~flag_sel || (flag_sel && ~wr_flag)))begin //突发读优先级高prior_flag <= 1'b1;end end/******************************************************************/ /******************** 地址设计 ****************************/ //wr_bank rd_bankalways @(posedge clk or negedge rst_n)beginif(~rst_n)beginwr_bank <= 2'b00;rd_bank <= 2'b11;endelse if(change_bank)beginwr_bank <= ~wr_bank;rd_bank <= ~rd_bank;endend// wr_addr rd_addralways @(posedge clk or negedge rst_n) begin if (rst_n==0) beginwr_addr <= 0; endelse if(add_wr_addr) beginif(end_wr_addr)wr_addr <= 0; elsewr_addr <= wr_addr+1 ;endendassign add_wr_addr = (state_c == WRITE) && ~avs_waitrequest;assign end_wr_addr = add_wr_addr && wr_addr == `BURST_MAX-1 ;always @(posedge clk or negedge rst_n) begin if (rst_n==0) beginrd_addr <= 0; endelse if(add_rd_addr) beginif(end_rd_addr)rd_addr <= 0; elserd_addr <= rd_addr+1 ;endendassign add_rd_addr = (state_c == READ) && ~avs_waitrequest;assign end_rd_addr = add_rd_addr && rd_addr == `BURST_MAX-1;//wr_finish 一帧数据全部写到SDRAMalways @(posedge clk or negedge rst_n)beginif(~rst_n)beginwr_finish <= 1'b0;endelse if(~wr_finish & wfifo_q[17])begin //写完 从wrfifo读出eopwr_finish <= 1'b1;endelse if(wr_finish && end_rd_addr)begin //读完wr_finish <= 1'b0;endend//change_bank ;//切换bank always @(posedge clk or negedge rst_n)beginif(~rst_n)beginchange_bank <= 1'b0;endelse beginchange_bank <= wr_finish && end_rd_addr;endend/****************************************************************//*********************** wrfifo 写数据 ************************/
//控制像素数据帧 写入 或 丢帧always @(posedge clk_in or negedge rst_n)beginif(~rst_n)beginwr_data_flag <= 1'b0;end else if(~wr_data_flag & ~wr_finish_r[1] & din_sop)begin//可以向wrfifo写数据wr_data_flag <= 1'b1;endelse if(/*wr_finish_r[1] && din_sop*/wr_data_flag & din_eop)begin//不可以向wrfifo写入数据wr_data_flag <= 1'b0;endendalways @(posedge clk_in or negedge rst_n)begin //把wr_finish从wrfifo的读侧同步到写侧if(~rst_n)beginwr_finish_r <= 0;endelse beginwr_finish_r <= {wr_finish_r[0],wr_finish};endend/****************************************************************/always @(posedge clk_out or negedge rst_n)beginif(~rst_n)beginrd_data <= 0;rd_data_vld <= 1'b0;endelse beginrd_data <= rfifo_q;rd_data_vld <= rfifo_rdreq;endendwrfifo wrfifo_inst (.aclr (~rst_n ),.data (wfifo_data ),.rdclk (clk ),.rdreq (wfifo_rdreq),.wrclk (clk_in ),.wrreq (wfifo_wrreq),.q (wfifo_q ),.rdempty(wfifo_empty),.rdusedw(wfifo_usedw),.wrfull (wfifo_full ));assign wfifo_data = {din_eop,din_sop,din};assign wfifo_wrreq = ~wfifo_full & din_vld & ((~wr_finish_r[1] & din_sop) ||wr_data_flag);assign wfifo_rdreq = state_c == WRITE && ~avs_waitrequest;rdfifo u_rdfifo(.aclr (~rst_n ),.data (rfifo_data ),.rdclk (clk_out ),.rdreq (rfifo_rdreq),.wrclk (clk ),.wrreq (rfifo_wrreq),.q (rfifo_q ), .rdempty (rfifo_empty),.wrfull (rfifo_full ),.wrusedw (rfifo_usedw)
);assign rfifo_data = avs_rddata;assign rfifo_wrreq = ~rfifo_full & avs_rddata_vld;assign rfifo_rdreq = ~rfifo_empty & rdreq;//输出assign dout = rd_data;assign dout_vld = rd_data_vld;assign avm_wrdata = wfifo_q[15:0];assign avm_write = ~(state_c == WRITE && ~avs_waitrequest);assign avm_read = ~(state_c == READ && ~avs_waitrequest);assign avm_addr = (state_c == WRITE)?{wr_bank[1],wr_addr[21:9],wr_bank[0],wr_addr[8:0]}:((state_c == READ)?{rd_bank[1],rd_addr[21:9],rd_bank[0],rd_addr[8:0]}:0);endmodule
四、参考
基于FPGA的图像实时采集
五、源码
https://github.com/IvanXiang/FPGA_COMS_SDRAM_VGA