图
- 1.图的基本概念
- 2. 图的存储结构
- 2.1邻接矩阵
- 2.2邻接表
- 2.3两种实现的比较
- 3.图的遍历
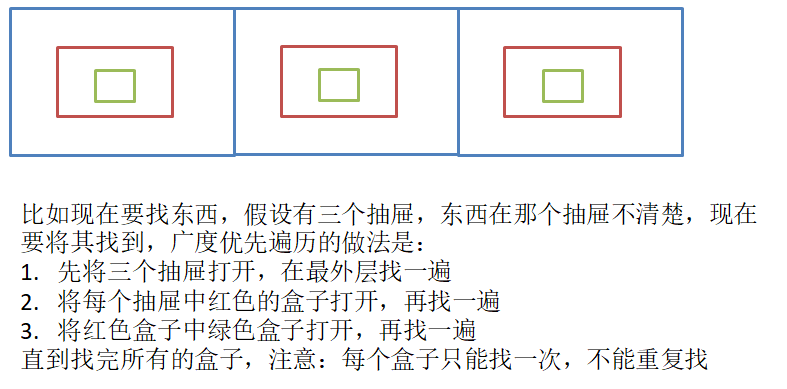
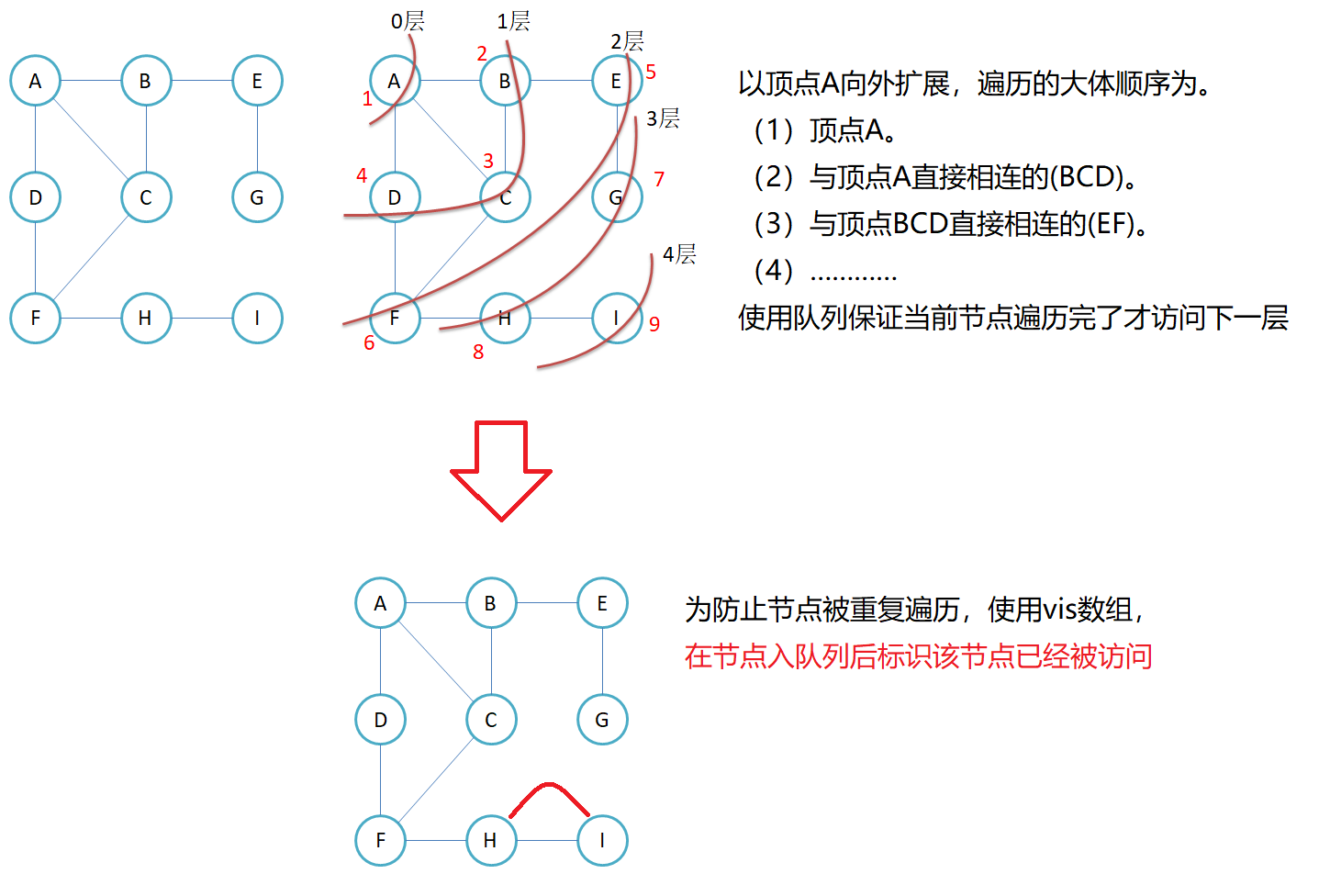
- 3.1 图的广度优先遍历
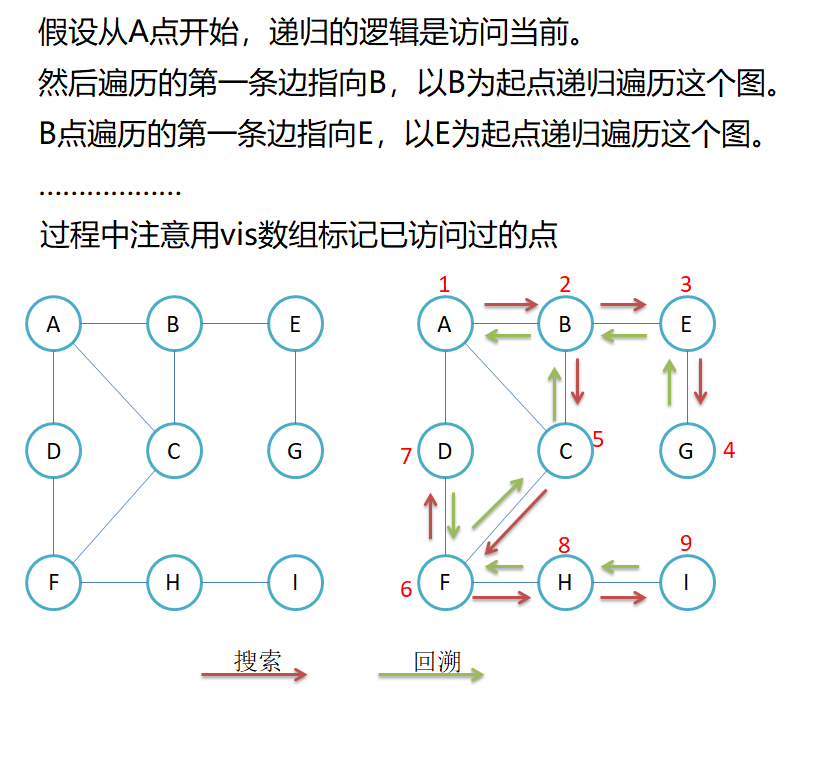
- 3.2 图的深度优先遍历
- 4.最小生成树
- 4.1 Kruskal算法
- 4.2 Prim算法
- 4.3 两个算法比较
- 5.最短路径
- 5.1两个抽象存储
- 5.2单源最短路径--Dijkstra算法
- 5.3单源最短路径--Bellman-Ford算法
- 5.4 多源最短路径--Floyd-Warshall算法
- 5.5 几个算法的比较
1.图的基本概念
概念多,但是不难理解,难的算法部分基本都是图解。
图是由顶点集合及顶点间的关系组成的一种数据结构:G = (V, E),其中V为顶点集合,E为边集合。
顶点和边:图中结点称为顶点,第i个顶点记作vi。两个顶点vi和vj相关联称作顶点vi和顶点vj之间有一条边,图中的第k条边记作ek,ek = (vi,vj)或<vi,vj>
有向图:在有向图中,顶点对<x, y>是有序的,顶点对<x,y>称为顶点x到顶点y的一条边(弧),<x, y>和<y, x>是两条不同的边,比如下图G3和G4为有向图。
无向图:顶点对(x, y)是无序的,顶点对(x,y)称为顶点x和顶点y相关联的一条边,这条边没有特定方向,(x, y)和(y,x)是同一条边,比如下图G1和G2为无向图。
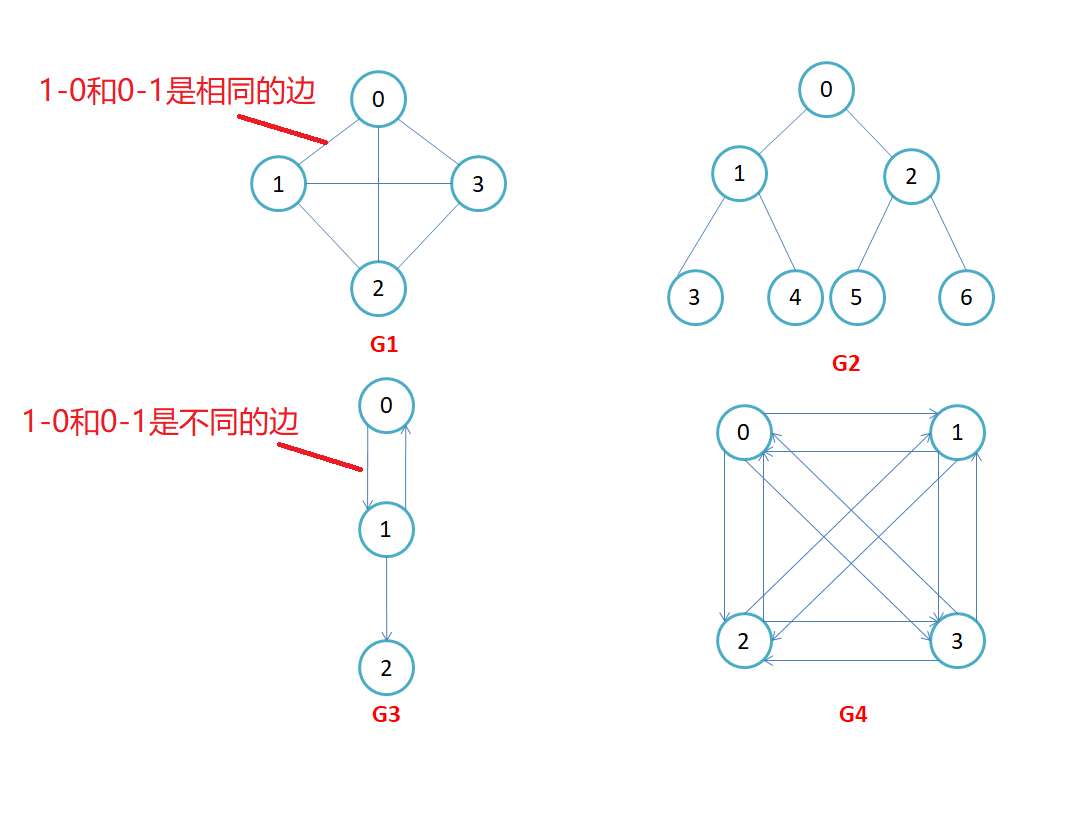
无向完全图:在有n个顶点的无向图中,若有n * (n-1)/2条边,即任意两个顶点之间有且仅有一条边,则称此图为无向完全图,比如上图G1;
有向完全图:在n个顶点的有向图中,若有n * (n-1)条边,即任意两个顶点之间有且仅有方向相反的边,则称此图为有向完全图,比如上图G4。
邻接顶点:在无向图G中,若 (u, v)是E(G)中的一条边,则称u和v互为邻接顶点,并称边(u,v)依附于顶点u和v;在有向图G中,若 <u, v>是E(G)中的一条边,则称顶点u邻接到v,顶点v邻接自顶点u,并称边<u, v>与顶点u和顶点v相关联。
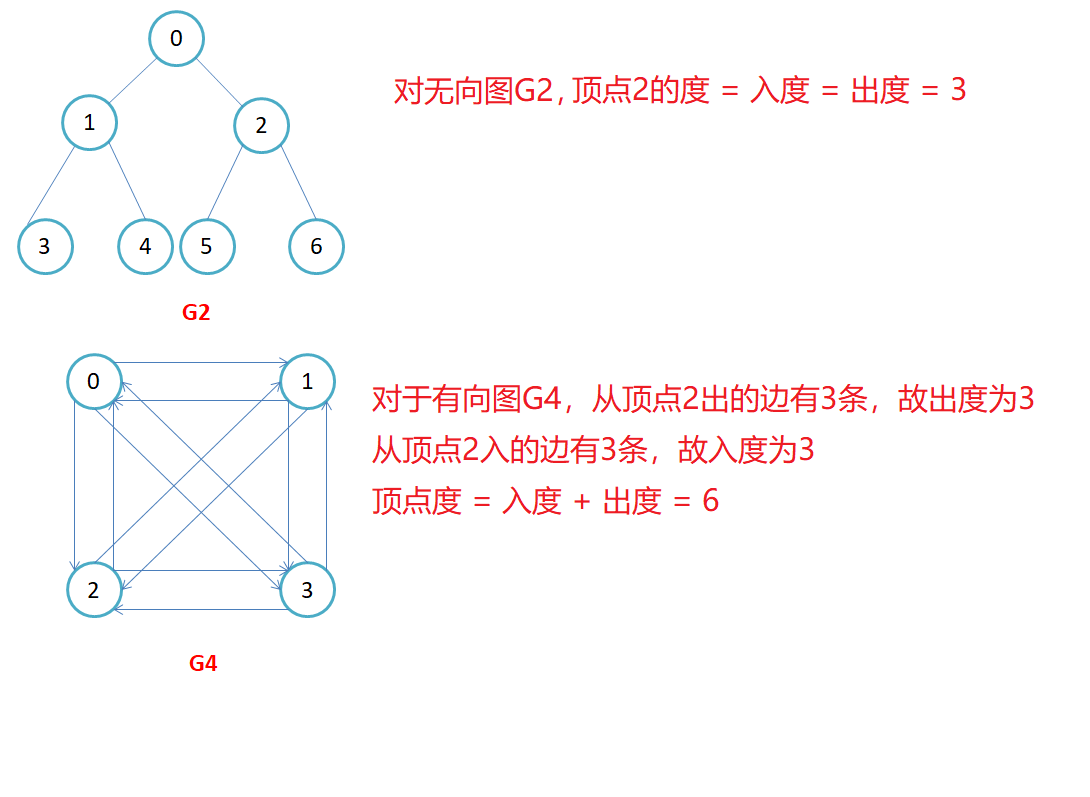
顶点的度:顶点v的度是指与它相关联的边的条数,记作deg(v)。在有向图中,顶点的度等于该顶点的入度与出度之和,其中顶点v的入度是以v为终点的有向边的条数,记作indev(v);顶点v的出度是以v为起始点的有向边的条数,记作outdev(v)。因此:dev(v) = indev(v) + outdev(v)。注意:对于无向图,顶点的度等于该顶点的入度和出度,即dev(v) = indev(v) = outdev(v)。
权值:边附带的数据信息。
路径:在图G = (V, E)中,若从顶点vi出发有一组边使其可到达顶点vj,则称顶点vi到顶点vj的顶点序列为从顶点vi到顶点vj的路径。
路径长度:对于不带权的图,一条路径的路径长度是指该路径上的边的条数;
对于带权的图,一条路径的路径长度是指该路径上各个边权值的总和。
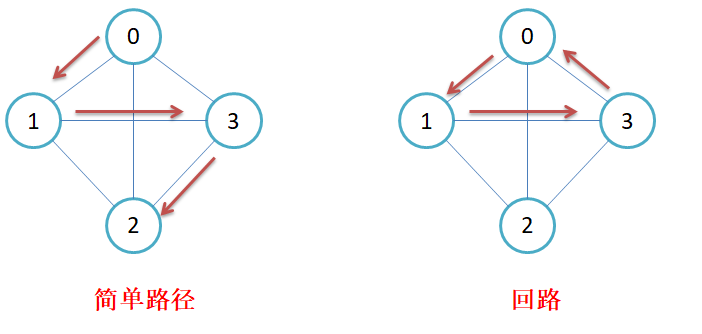
简单路径与回路:若路径上各顶点v1,v2,v3,…,vm均不重复,则称这样的路径为简单路径。若路径上第一个顶点v1和最后一个顶点vm重合,则称这样的路径为回路或环。
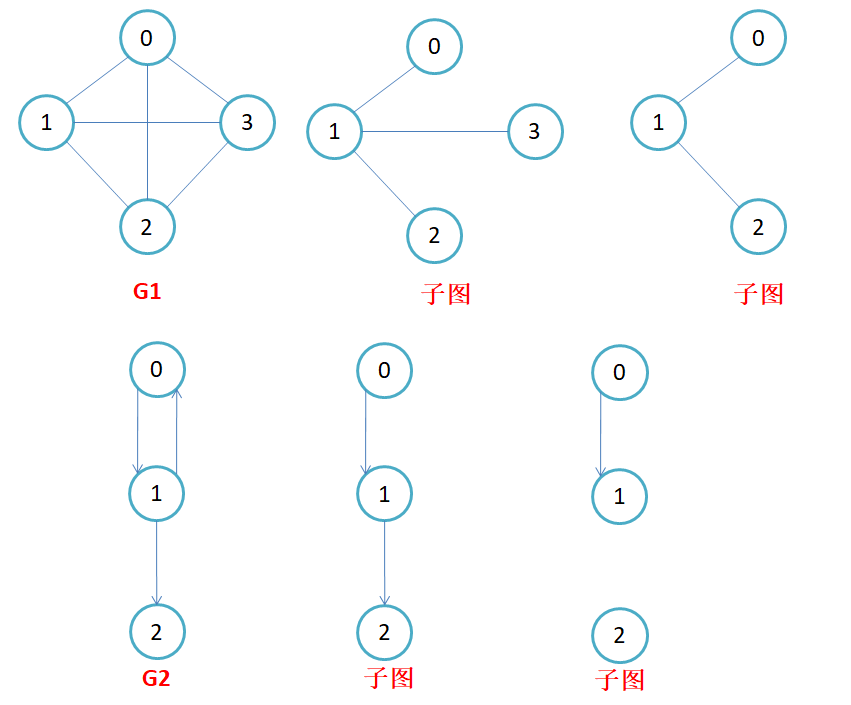
子图:设图G = {V, E}和图G1 = {V1,E1},若V1属于V且E1属于E,则称G1是G的子图。
连通图:在无向图中,若从顶点v1到顶点v2有路径,则称顶点v1与顶点v2是连通的。如果图中任意一对顶点都是连通的,则称此图为连通图
强连通图:在有向图中,若在每一对顶点vi和vj之间都存在一条从vi到vj的路径,也存在一条从vj到vi的路径,则称此图是强连通图。
生成树:一个连通图的最小连通子图称作该图的生成树(形成连通图并且使用的边数量少)。有n个顶点的连通图的生成树有n个顶点和n-1条边。
图与树的关系:
- 树是一种特殊的无环连通图。
- 树关注的节点(顶点)存储的值。
- 图关注的是顶点关系以及边的权值。
2. 图的存储结构
因为图中既有节点,又有边(节点与节点之间的关系),因此,在图的存储中,只需要保存:节点和边关系即可。节点保存比较简单,只需要一段连续空间即可,那边关系该怎么保存呢?
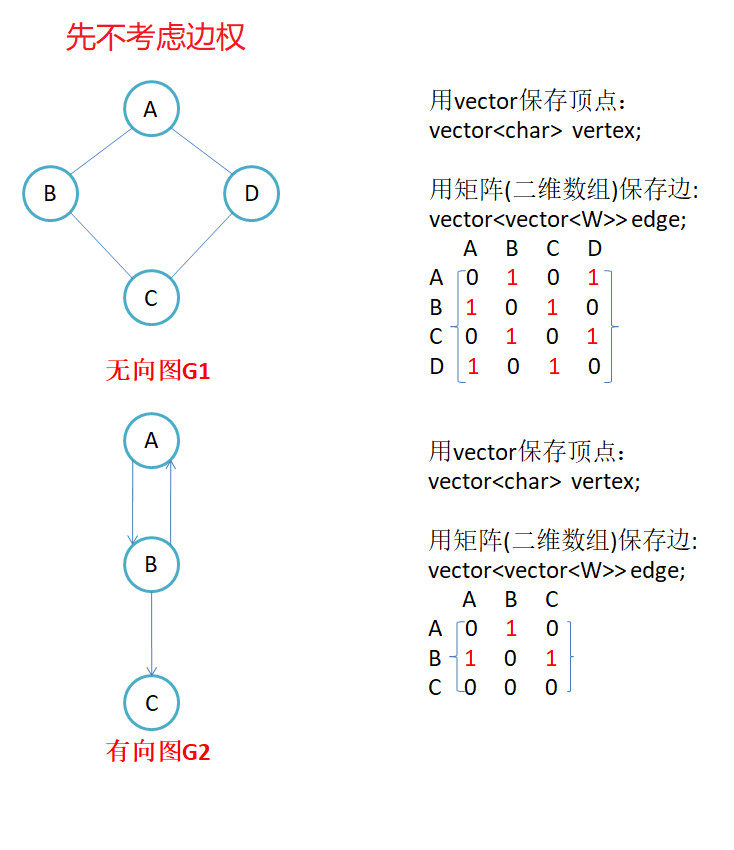
2.1邻接矩阵
因为节点与节点之间的关系就是连通与否,即为0或者1,因此邻接矩阵(二维数组)即是:先用一个数组将定点保存,然后采用矩阵来表示节点与节点之间的关系。
注意:
- 无向图的邻接矩阵是对称的,第i行(列)元素之和,就是顶点i的度。有向图的邻接矩阵则不一定是对称的,第i行(列)元素之后就是顶点i 的出(入)度。
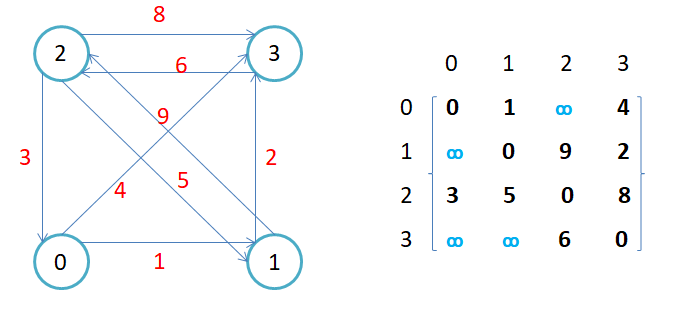
- 如果边带有权值,并且两个节点之间是连通的,上图中的边的关系就用权值代替,如果两个顶点不通,则使用无穷大(自己设定值表示无穷)代替。
代码实现:
namespace maritx
{//V为顶点类型,无论什么类型都可以转换位对于的下标,访问时使用哈希表转换出下标//W为边类型,一般为数值类型,MAX_W代表边不存在//Direction表示方向,默认无向template<class V, class W, W MAX_W = INT_MAX, bool Direction = false> //默认无向class Graph{private:vector<V> _vertexs; //顶点map<V, size_t> _VIndexMap; //顶点 :下标vector<vector<W>> _matrix; //邻接矩阵public:typedef Graph<V, W, MAX_W, Direction> self;Graph() = default;Graph(const V* vertexs, size_t n){_vertexs.resize(n);for (size_t i = 0; i < n; i++){_vertexs[i] = vertexs[i];_VIndexMap[vertexs[i]] = i;}//初始化邻接矩阵_matrix.resize(n);for (int i = 0; i < n; i++){_matrix[i].resize(n, MAX_W);}}size_t GetVIndex(const V& v){if (_VIndexMap.count(v)){return _VIndexMap[v];}else //如果没有这个顶点{throw invalid_argument("不存在的顶点");//assert(false);return -1;}}void AddEdge(const V& src, const V& dst, const W& w){size_t srci = GetVIndex(src);size_t dsti = GetVIndex(dst);_AddEdge(srci, dsti, w);}void _AddEdge(int srci, int dsti, const W& w){_matrix[srci][dsti] = w; //有向图只需添加一边if (Direction == false){_matrix[dsti][srci] = w;}}};
}
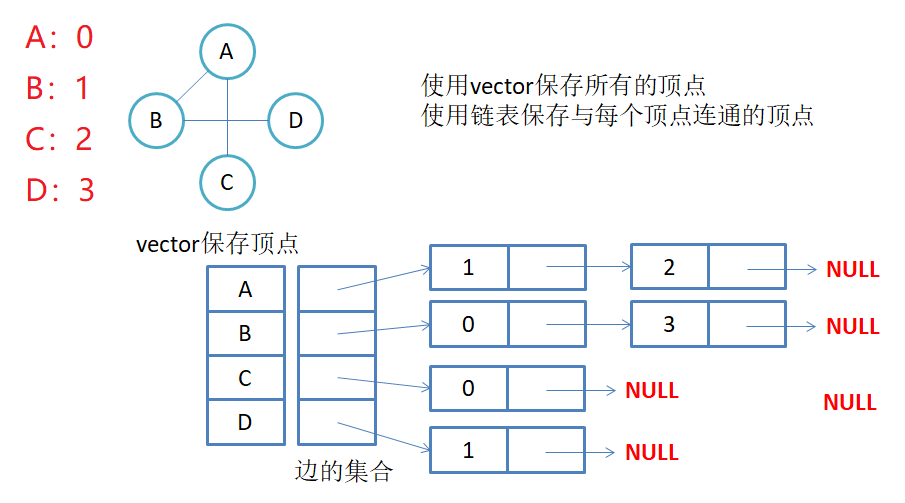
2.2邻接表
邻接表:使用数组表示顶点的集合,使用链表表示边的关系。
-
无向图邻接表存储
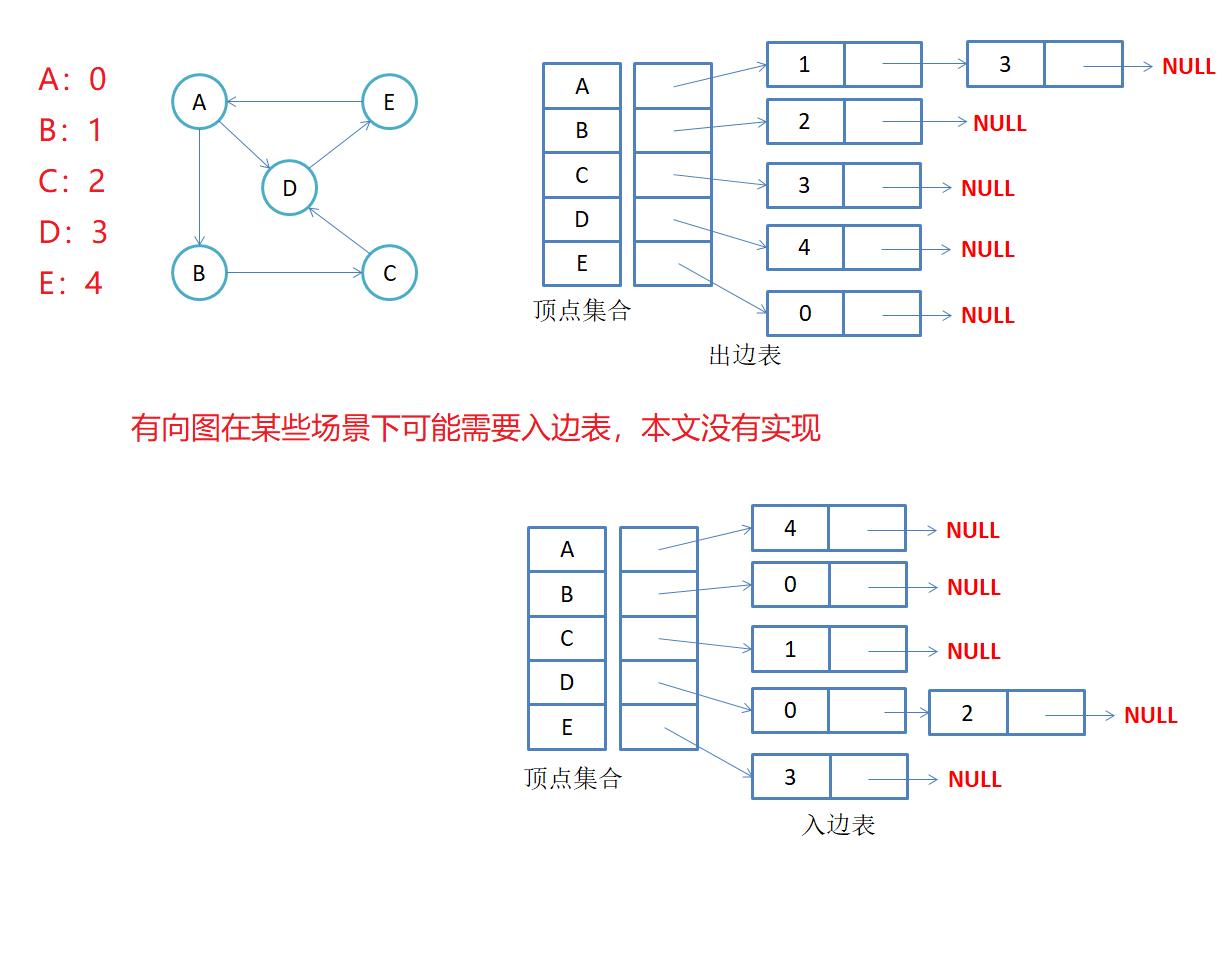
-
有向图邻接表存储
代码实现:
namespace link_table
{template<class W>struct Edge{W _w; //权值int _dsti;Edge<W>* _next;Edge(int dsti,const W& w):_dsti(dsti),_w(w),_next(nullptr){}};template<class V, class W, bool Direction = false> //默认无向class Graph{public:typedef Edge<W> Edge;Graph(const V* vertexs, size_t n){_vertexs.resize(n);for (size_t i = 0; i < n; i++){_vertexs[i] = vertexs[i];_VIndexMap[vertexs[i]] = i;}//初始化邻接矩阵_tables.resize(n, nullptr);}size_t GetVIndex(const V& v){if (_VIndexMap.count(v)){return _VIndexMap[v];}else //如果没有这个顶点{throw invalid_argument("不存在的顶点");//assert(false);return -1;}}void AddEdge(const V& src, const V& dst, const W& w){size_t srci = GetVIndex(src);size_t dsti = GetVIndex(dst);Edge* newnode = new Edge(dsti, w);newnode->_next = _tables[srci];_tables[srci] = newnode; //有向图只需添加一边if (Direction == false){Edge* newnode = new Edge(srci, w);newnode->_next = _tables[dsti];_tables[dsti] = newnode;}}void Print(){// 打印顶点和下标映射关系for (size_t i = 0; i < _vertexs.size(); ++i){cout << _vertexs[i] << "-" << i << " ";}cout << endl << endl;for (int i = 0; i < _tables.size(); i++){Edge* cur = _tables[i];if(cur) cout << i;while (cur){cout << "->" << cur->_dsti ;cur = cur->_next;}cout << endl;}}private:vector<V> _vertexs; //顶点map<V, int> _VIndexMap; //顶点:下标vector<Edge*> _tables; //邻接表};
}
2.3两种实现的比较
- 对于邻接矩阵,优点是确定AB两点间关系时方便。缺点是对于边数量少的情况,想遍历与某点的出(入)边,需要遍历矩阵的一行(N),空间也会很浪费。
- 对于邻接表,优点是边少时遍历点的出(入)边,有几条边就走几次。缺点是想确定AB两点间关系时需要遍历一次邻接表。
- 推荐关系复杂,边多时使用邻接矩阵。 关系简单,边少时使用邻接表。
- 两种存储实现图相关算法差别不大,后面的算法都是基于邻接矩阵的。
3.图的遍历
给定一个图G和其中任意一个顶点v0,从v0出发,沿着图中各边访问图中的所有顶点,且每个顶点仅被遍历一次。"遍历"即对结点进行某种操作的意思。
树的遍历是自顶点向下,图的遍历是选定一个顶点作为起点。
3.1 图的广度优先遍历
//遍历
void BFS(const V& v)
{size_t n = _vertexs.size();size_t srci = GetVIndex(v);vector<bool> visited(n);queue<size_t> q;q.push(srci);visited[srci] = true;while (!q.empty()){size_t sz = q.size();for (size_t i = 0; i < sz; i++){size_t top = q.front(); q.pop();cout << _vertexs[top] << " ";for (size_t j = 0; j < n; j++){if (_matrix[top][j] != MAX_W && visited[j] != true) //存在并且没有访问过{q.push(j);visited[j] = true;}}}}//有可能存在从v点出发到不了某些点的情况,这时可遍历vis数组for (int i = 0; i < n; i++){if (visited[i] == false){cout << _vertexs[i] << " ";}}cout << endl;
}
3.2 图的深度优先遍历
void DFS(const V& v)
{size_t srci = GetVIndex(v);vector<bool> visited(_vertexs.size());dfs(srci, visited);//有可能存在从v点出发到不了某些点的情况,这时可遍历vis数组for (int i = 0; i < n; i++){if (visited[i] == false){cout << _vertexs[i] << " ";}}
}void dfs(size_t srci, vector<bool>& visited)
{cout << _vertexs[srci] << " ";visited[srci] = true;for (int i = 0; i < _vertexs.size(); i++){if (_matrix[srci][i] != MAX_W && visited[i] != true){dfs(i, visited);}}
}
4.最小生成树
连通图中的每一棵生成树,都是原图的一个极大无环子图,即:从其中删去任何一条边,生成树就不在连通;反之,在其中引入任何一条新边,都会形成一条回路。
若连通图由n个顶点组成,则其生成树必含n个顶点和n-1条边。因此构造最小生成树的准则有三条:
- 只能使用图中的边来构造最小生成树
- 只能使用恰好n-1条边来连接图中的n个顶点
- 选用的n-1条边不能构成回路
构造最小生成树的方法:Kruskal算法和Prim算法。这两个算法都采用了逐步求解的贪心策略。
贪心算法:是指在问题求解时,总是做出当前看起来最好的选择。也就是说贪心算法做出的不是整体最优的的选择,而是某种意义上的局部最优解。贪心算法不是对所有的问题都能得到整体最优解,Kruskal算法和Prim算法都可保证最优,两种策略相当容易记忆,证明难度较大,本文不做证明。
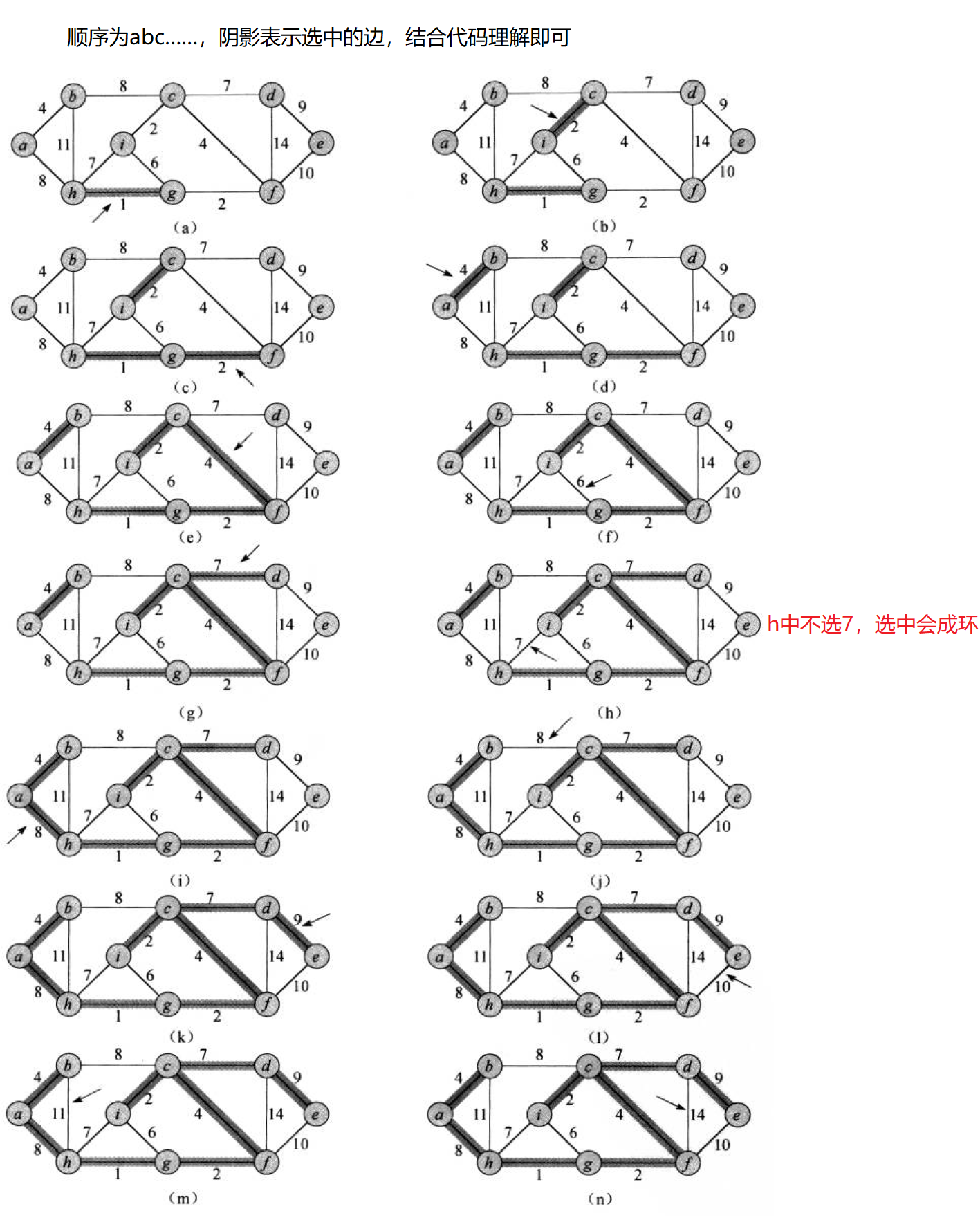
4.1 Kruskal算法
- 每次都选用图中权值最小的边来构造,可以使用堆实现。
- 只能选n - 1条边。
- 选用的边不可构成回路,可以使用并查集来判断环是否存在。
不了解并查集的可以看这篇文章(很简单的):并查集
不了解堆的可以看这篇文章:堆
struct Edge //存储边信息
{int _srci;int _dsti;W _w;Edge(int srci, int dsti, W w):_srci(srci),_dsti(dsti),_w(w){}bool operator>(const Edge& edge) const{return _w > edge._w;}
};//Kruskal(克鲁斯卡尔),生成的了返回权值,生成不了返回W默认值
W Kruskal(self& minTree)
{//初始化一下最小生成树size_t n = _vertexs.size();minTree._vertexs = _vertexs;minTree._VIndexMap = _VIndexMap;minTree._matrix.resize(n);for (auto& e : minTree._matrix){e.resize(_vertexs.size(), MAX_W);}UnionFindSet ufs(n); //并查集priority_queue<Edge, vector<Edge>, greater<Edge>> pq; //堆//入边for (int i = 0; i < n; i++){for (int j = i; j < n; j++) //无向图只需要一半即可{if(_matrix[i][j] != MAX_W)pq.push(Edge(i, j, _matrix[i][j]));}}//依次选最小边,选n - 1size_t esum = 0;W ret = 0;//不断选最小边即可while (!pq.empty()){Edge e = pq.top(); pq.pop();if (!ufs.InSet(e._srci, e._dsti)) //不在一个集合(不构成回路),当前边可选{minTree.AddEdge(e._srci, e._dsti, e._w);esum++;ret += e._w;ufs.Union(e._srci, e._dsti);}}//判断可否形成最小生成树if (esum == n - 1){return ret;}else{return W();}
}
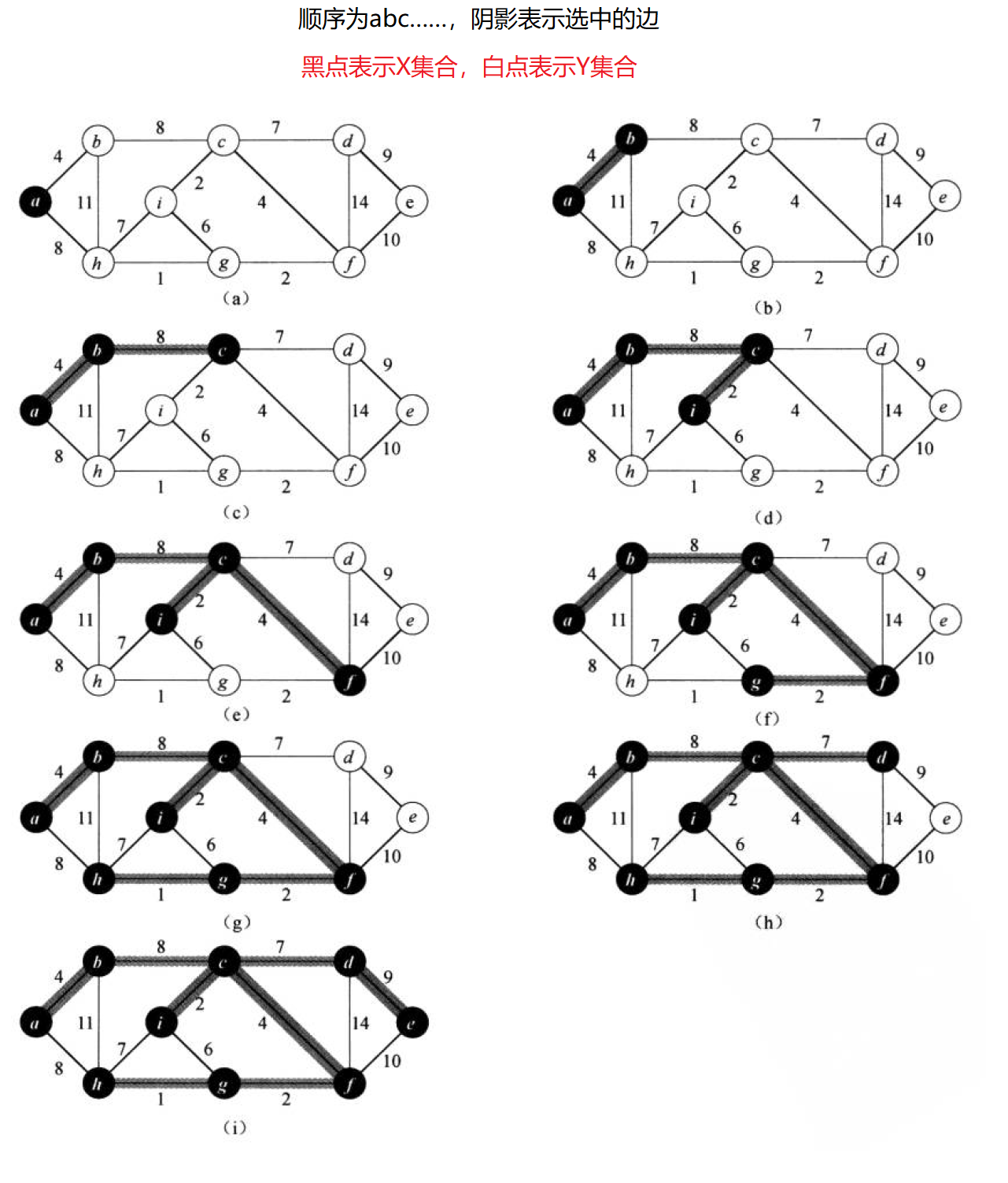
4.2 Prim算法
- Kruskal算法侧重边,Prim算法侧重点。
- 设有X,Y两个点集合,X表示已在最小生成树中的点,Y表示还未在最小生成树中的点。故选边时选的是X->Y所有边中的最小权值。
- 只能选n - 1条边。
- 选用的边不可构成回路,只需选的边起点在X,终点在Y即可。
//prim(普利姆算法)
W Prim(self& minTree, const V& src)
{//初始化一下最小生成树size_t n = _vertexs.size();minTree._vertexs = _vertexs;minTree._VIndexMap = _VIndexMap;minTree._matrix.resize(n);for (auto& e : minTree._matrix){e.resize(_vertexs.size(), MAX_W);}size_t srci = GetVIndex(src); //起点//存储边的堆priority_queue<Edge, vector<Edge>, greater<Edge>> pq;//X和Y集合(不在X就在Y)vector<bool> X(n, false);X[srci] = true;//把X初始点的边入进去for (size_t i = 0; i < n; i++){if (_matrix[srci][i] != MAX_W){pq.push(Edge(srci, i, _matrix[srci][i]));}}//选出边的条数size_t esum = 0;W ret = 0;while (!pq.empty()){Edge e = pq.top(); pq.pop();if (X[e._dsti] != true) //终点在Y,选了不成环{minTree.AddEdge(e._srci, e._dsti, e._w); esum++;ret += e._w;X[e._dsti] = true; for (int i = 0; i < n; i++){//入边为X-Y,X-X的边没必要入if (_matrix[e._dsti][i] != MAX_W && X[i] != true) {pq.push(Edge(e._dsti, i, _matrix[e._dsti][i]));}}}}//判断可否形成最小生成树if (esum == n - 1){return ret;}else{return W();}
}
4.3 两个算法比较
- Kruskal算法适用于稀疏图,即边少的图,因为该算法需要用堆维护所有的边。
- Prim算法适用于稠密图,即边多的图,因为该算法的要点在点,并不需要维护所有的边(X-X的边无需维护)。
5.最短路径
5.1两个抽象存储
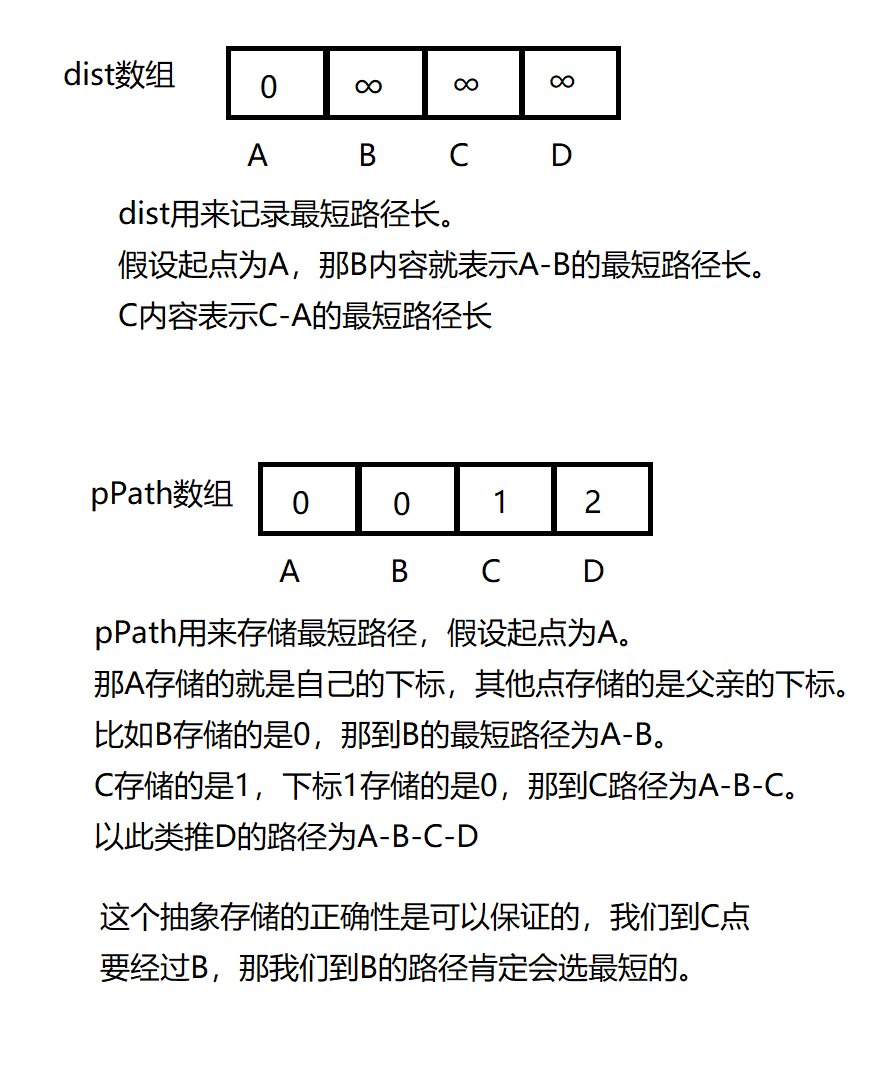
基于这两个抽象数据结构还原最短路径:
//打印最短路径的算法
void PrinrtShotPath(const V& src, const vector<W>& dist, const vector<int>& pPath)
{size_t n = _vertexs.size();size_t srci = GetVIndex(src);for (size_t i = 0; i < n; i++){if (i != srci) //源到源不打印{size_t par = i;vector<size_t> path; //先从结尾开始添加while (par != srci){path.push_back(par);par = pPath[par];}path.push_back(srci); reverse(path.begin(), path.end()); //翻转过来for (auto pos : path){cout << _vertexs[pos] << "->";}cout << dist[i] << endl; //打印长度}}
}
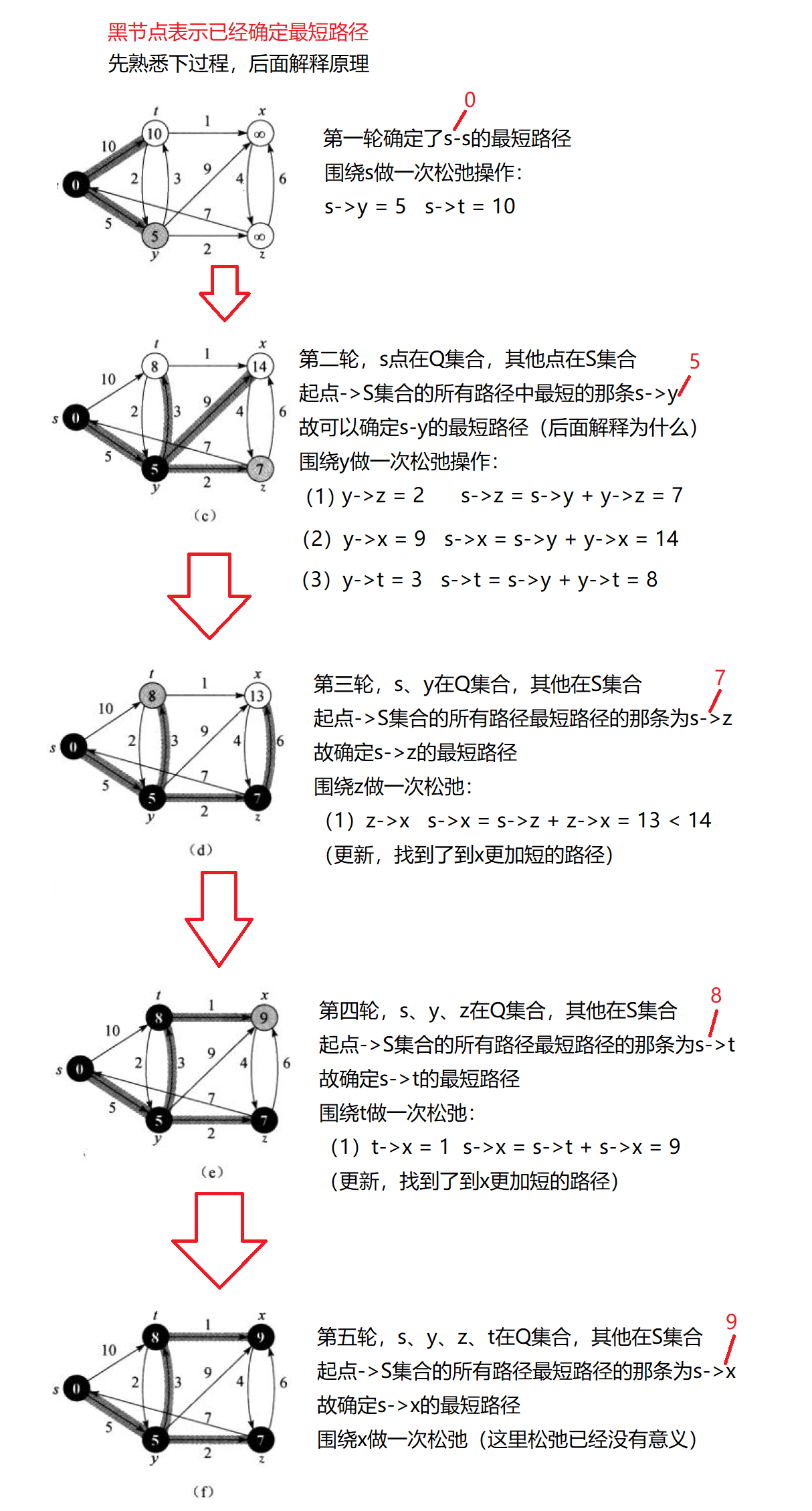
5.2单源最短路径–Dijkstra算法
- 贪心,分为两个集合Q和S,其中Q表示已经确定最短路径的顶点集合,S表示未确定最短路径的顶点集合。
- 在已有最短路径的基础上更新到其他顶点的路径,如果更短就更新,这个操作称为松弛顶点。(建议配合图解看)
- Dijkstra算法不适用于带负权的最短路径问题(后面解释)。
图解:
正确性证明:
- 图边权没有负数
(1)如果现在遍历 起点->S(未确定最短路径点集合)的边,找到一条s->x(记和为len)的最短,那就可以确定这条是s->x的最短。
(2)因为如果存在s->……(和一定小于len)->x的一条更短路径,那遍历时就会先选中s->……中的顶点进行松弛,而不是选中x进行松弛。 - 图边权有负数
(1)遍历 起点->S(未确定最短路径点集合)的边,找到一条s->x(记和为len)的最短,不能确定这条是s->x的最短。
(2)因为可能存在s->……(大于len)->负权->x(小于len),这时候就会更新不到这条真正的最短
//单源最短路径:dijkstra算法(不带负权)
//每次都可以确定一个点的最短路径,然后围绕这个点松弛
//准确性:如果当前选的不是最短,那就不会选中当前,而是其他的点,在松弛操作中更新出最短
//两个输出型参数,dist为路径长,pPath记录路径
void Dijkstra(const V& src, vector<W>& dist, vector<int>& pPath)
{size_t n = _vertexs.size();size_t srci = GetVIndex(src);//初始化dist.resize(n, MAX_W);pPath.resize(n, -1);dist[srci] = W();//Q中为true,说明已经确认最短路径vector<bool> Q(n, false);//要确定N个顶点的最短,循环N次(其实只要N-1次即可,但为了逻辑就多循环一次)for (size_t i = 0; i < n; i++){size_t u = srci;W min = MAX_W;//找到最短的路径,该路径已经可确认为最短for (size_t j = 0; j < n; j++){if (Q[j] == false && dist[j] < min){u = j;min = dist[j];}}Q[u] = true;//松弛顶点 srci-u u-v -> srci-vfor (size_t v = 0; v < n; v++){if (_matrix[u][v] != MAX_W && dist[u] + _matrix[u][v] < dist[v]){dist[v] = dist[u] + _matrix[u][v];pPath[v] = u;}} }
}
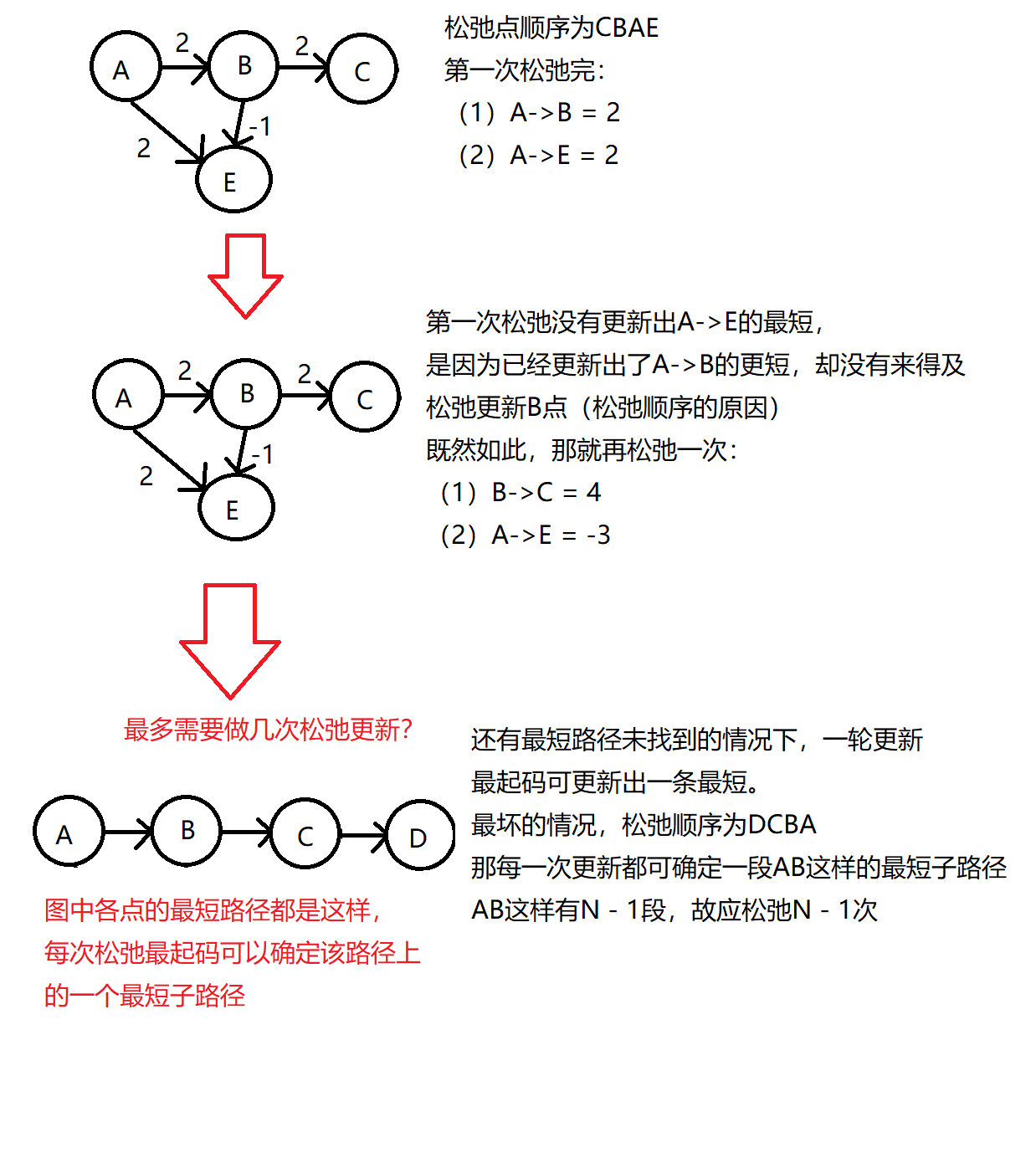
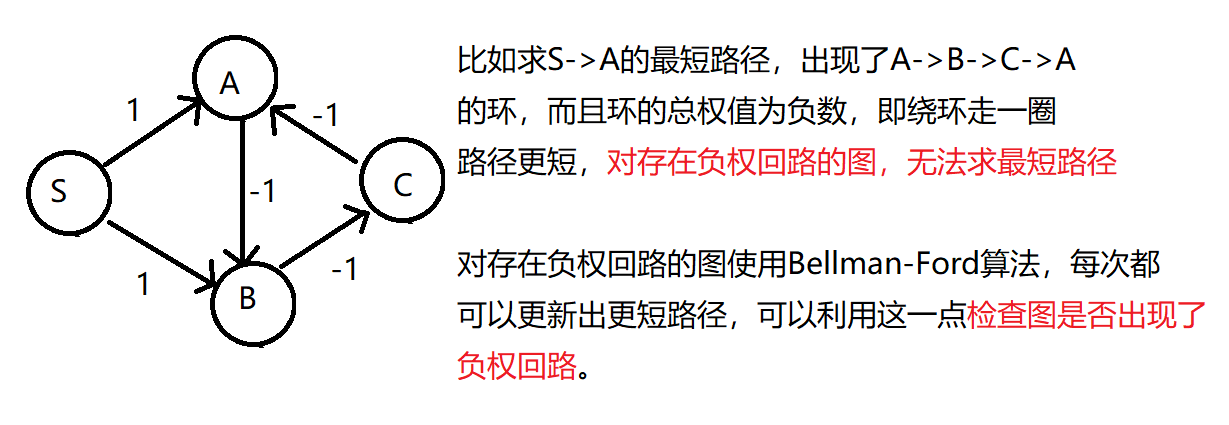
5.3单源最短路径–Bellman-Ford算法
- Bellman-Ford算法本质是暴力算法。
- Bellman-Ford算法可以解决带负权的问题。
- Bellman-Ford算法的核心在于松弛顶点。
图解:
负权回路:
//单源最短路径:BellmanFord算法(带负权,注意负权成环)
bool BellmanFord(const V& src, vector<W>& dist, vector<int>& pPath)
{size_t n = _vertexs.size();size_t srci = GetVIndex(src);//初始化dist.resize(n, MAX_W);pPath.resize(n, -1);dist[srci] = W();//最多更新n - 1for (size_t k = 0; k < n - 1; k++){//优化的标志位,如果没有松弛更短,说明所有顶点最短路径都找到了bool flag = true;//所有顶点做一次松弛for (size_t i = 0; i < n; i++){for (size_t j = 0; j < n; j++){//src - i - jif (_matrix[i][j] != MAX_W && dist[i] + _matrix[i][j] < dist[j]) //更新出更短{dist[j] = dist[i] + _matrix[i][j];pPath[j] = i;flag = false;}}}if (flag){break;}}for (size_t i = 0; i < n; i++){for (size_t j = 0; j < n; j++){//还能更新说明存在负权回路问题if (_matrix[i][j] != MAX_W && dist[i] + _matrix[i][j] < dist[j]) //更新出更短{return false;}}}return true;
}
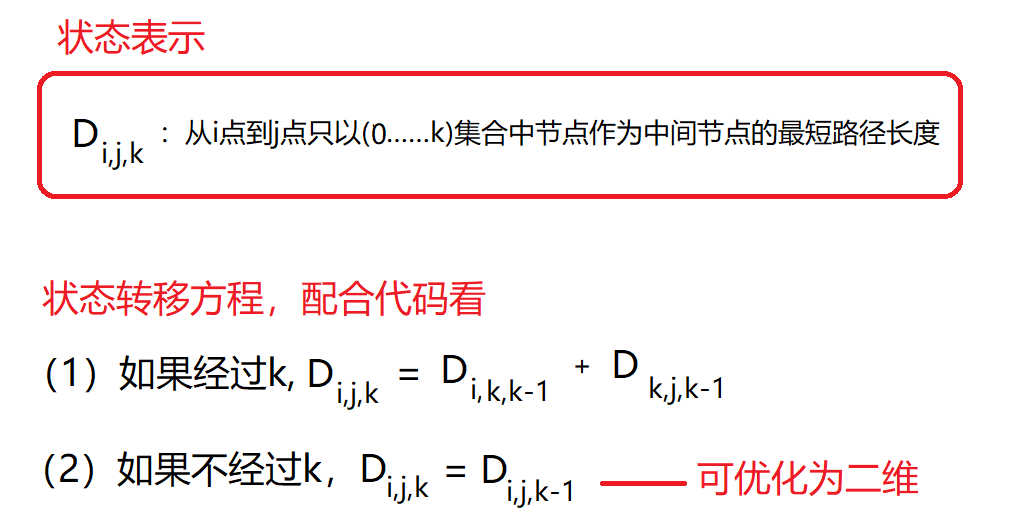
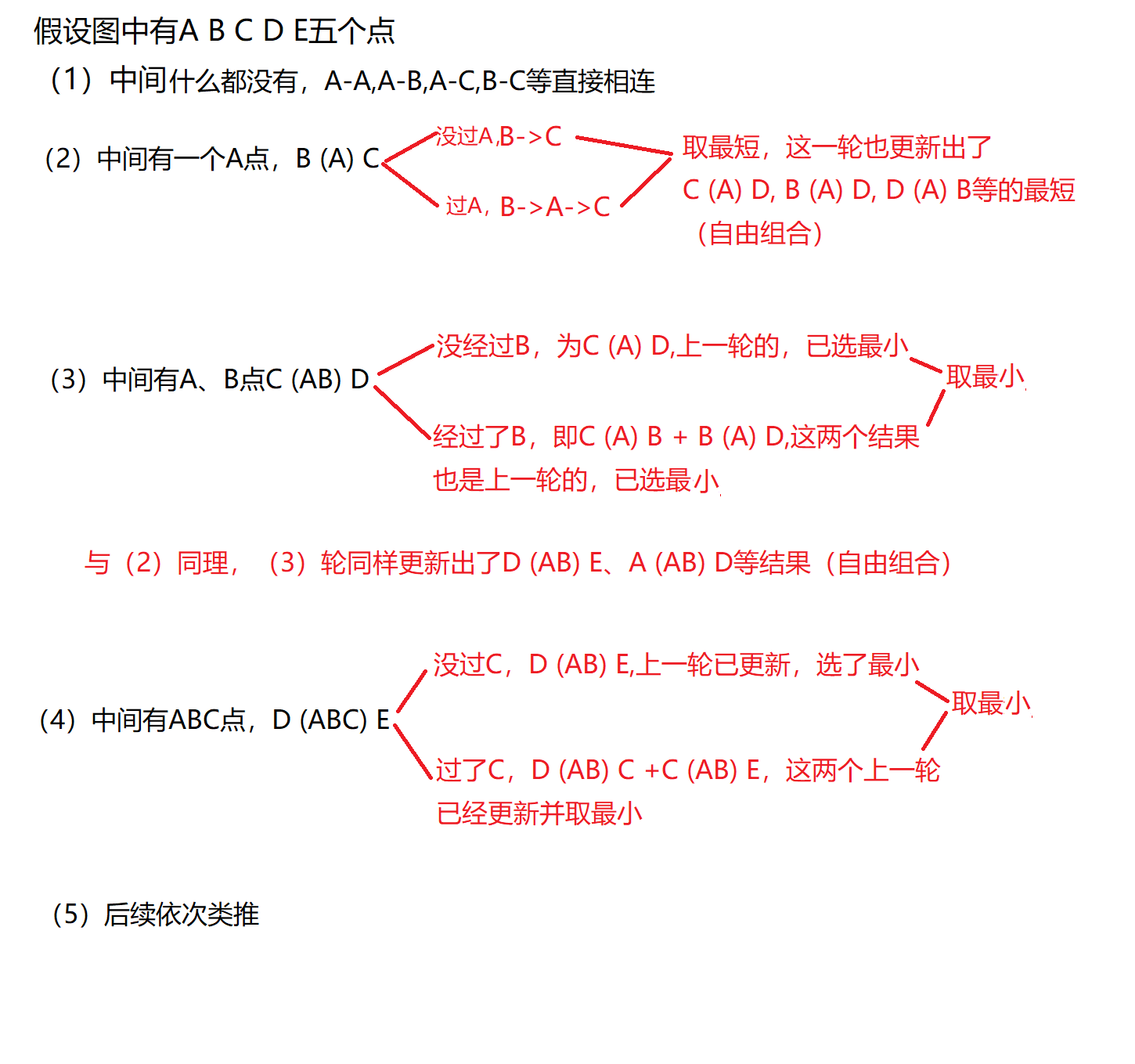
5.4 多源最短路径–Floyd-Warshall算法
- 多源最短,即求任意两点的最短路径。
- 适用于带负权的图。
- Floyd-Warshall算法的核心是动态规划。
图解:
//多源最短路径:FloydWarshall
//vvDist和vvPPath是二维的,vvDist[x]和vvPPath[x]表示以x为起点到各点的最短路径情况
void FloydWarShall(vector<vector<W>>& vvDist, vector<vector<int>>& vvPPath)
{size_t n = _vertexs.size();vvDist.resize(n);vvPPath.resize(n);// 初始化权值和路径矩阵for (size_t i = 0; i < n; ++i){vvDist[i].resize(n, MAX_W);vvPPath[i].resize(n, -1);}//把直接相连的边入进来for (size_t i = 0; i < n; i++){for (size_t j = 0; j < n; j++){if (_matrix[i][j] != MAX_W){vvDist[i][j] = _matrix[i][j];vvPPath[i][j] = i;}//i == j,即自己到自己if (i == j){vvDist[i][j] = W();}}}//中间经过了(0, k)这些顶点for (size_t k = 0; k < n; ++k){for (size_t i = 0; i < n; i++){for (size_t j = 0; j < n; j++){if (vvDist[i][k] != MAX_W && vvDist[k][j] != MAX_W && vvDist[i][k] + vvDist[k][j] < vvDist[i][j]){vvDist[i][j] = vvDist[i][k] + vvDist[k][j];vvPPath[i][j] = vvPPath[k][j];}}}}
}
5.5 几个算法的比较
- 假设图是稠密图,我们使用矩阵存储。 对这些算法的时间复杂度分析:
Dijkstra算法:O(N ^ 2)。
Bellman-Ford算法:O(N ^ 3)。
Floyd-Warshall算法:O(N ^ 3)。 - Dijkstra算法适用于不带负权的图,如果想对不带负权的图找多源最短路径,也可以循环N次Dijkstra算法,效率和Floyd-Warshall差不多。
- Bellman-Ford算法和Floyd-Warshall算法都可以解决带负权的问题。
- Bellman-Ford算法大多数情况是快于Floyd-Warshall算法的,只是要单源最短且带负权用Bellman-Ford即可。而且针对Bellman-Ford算法可以用SPFA队列优化。(SPFA优化本文不讲,SPFA优化后时间复杂度不变,最坏的情况和朴素Bellman-Ford算法一致)
- Floyd-Warshall算法用于解决多源最短路径是效果较好,而且可解决带负权问题。