【强化学习】《动手学强化学习》动态规划算法 一、基本思想 二、悬崖漫步环境 三、策略迭代算法 3.1 策略评估 3.2 策略提升 3.3 悬崖漫步环境下的策略迭代 四、价值迭代算法
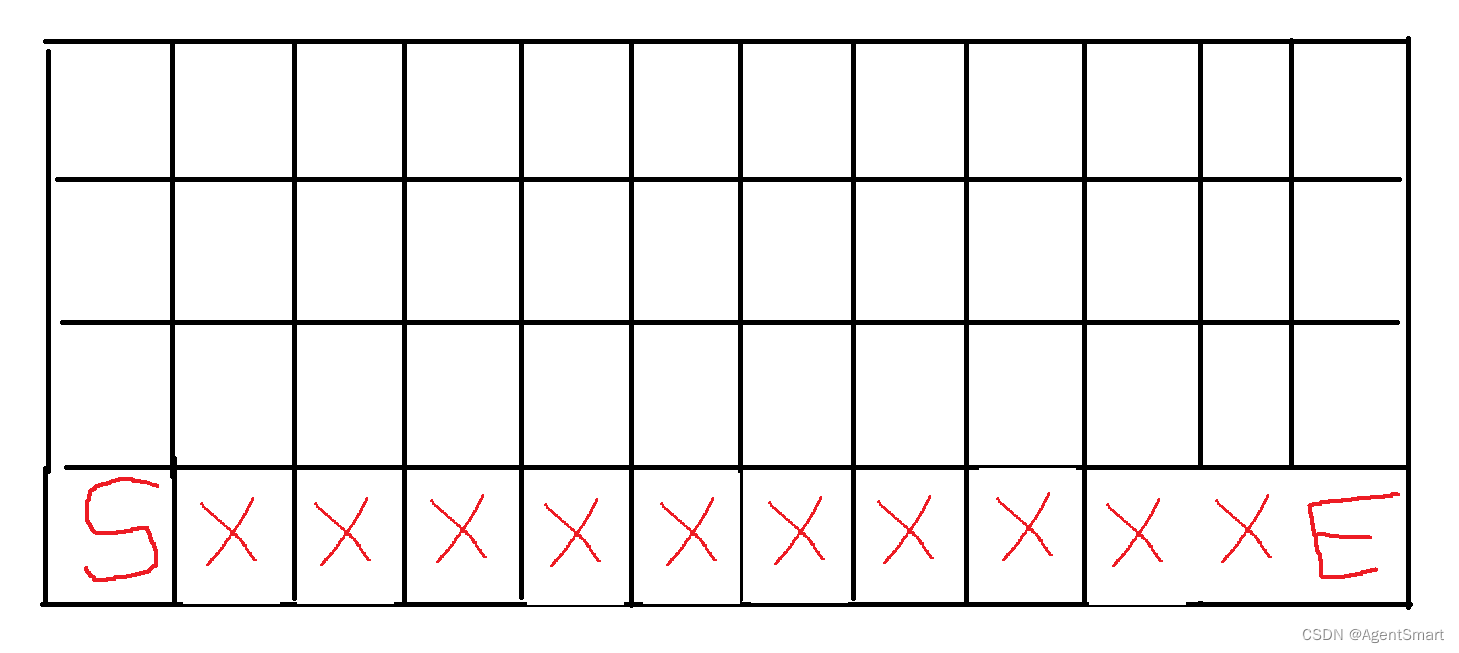
动态规划算法在计算机专业课中是特别重要的思想,将待求问题分解成若干个子问题,先求解子问题,然后利用子问题的解得到目标问题的解。贝尔曼方程将当前阶段的最优决策问题转化为下一阶段的最优决策问题,从而初始状态的最优决策可以由终状态的最优决策(一般易解)问题逐步迭代求解。 本篇文章介绍如何用动态规划的思想来求解马尔可夫决策过程中的最优策略。基于动态规划的强化学习算法主要有两种:策略迭代 、价值迭代 。策略迭代由两部分组成:策略评估与策略提升。策略评估使用贝尔曼期望方程来得到一个策略的状态价值函数;价值迭代直接使用贝尔曼最优方程来进行动态规划。 所有的动态规划强化学习算法必须要求都是基于模型的(model-based),即知道完整的MDP信息才能够使用贝尔曼方程进行迭代更新。如果无法得知完整MDP信息,就只能通过和环境进行交互采样。 4行12列的网格地图,左下角是起点,右下角是终点,最下方一行除了起点和终点以外都是悬崖。智能体的位置便是状态,在每个状态都可以执行上、下、左、右四个动作,如果触碰到边界则状态不变。终结状态是最下方一行除了起点以外的所有格子。智能体每走一步奖励-1,掉入悬崖奖励-100,在此激励下智能体想要用最短的步数到达终点。示意图如下 class CliffWalkingEnv : """ 悬崖漫步环境""" def __init__ ( self, ncol= 12 , nrow= 4 ) : self. ncol = ncol self. nrow = nrow self. P = self. createP( ) def createP ( self) : P = [ [ [ ] for j in range ( 4 ) ] for i in range ( self. nrow * self. ncol) ] change = [ [ 0 , - 1 ] , [ 0 , 1 ] , [ - 1 , 0 ] , [ 1 , 0 ] ] for i in range ( self. nrow) : for j in range ( self. ncol) : for a in range ( 4 ) : if i == self. nrow - 1 and j > 0 : P[ i * self. ncol + j] [ a] = [ ( 1 , i * self. ncol + j, 0 , True ) ] continue next_x = min ( self. ncol - 1 , max ( 0 , j + change[ a] [ 0 ] ) ) next_y = min ( self. nrow - 1 , max ( 0 , i + change[ a] [ 1 ] ) ) next_state = next_y * self. ncol + next_xreward = - 1 done = False if next_y == self. nrow - 1 and next_x > 0 : done = True if next_x != self. ncol - 1 : reward = - 100 P[ i * self. ncol + j] [ a] = [ ( 1 , next_state, reward, done) ] return P
上述环境代码的编写核心在于状态转移矩阵的编写。转移矩阵PP P 策略迭代是策略评估和策略提升不断循环交替,直至最后得到最优策略的过程。策略评估是计算一个状态价值函数的过程;策略提升是优化当前策略的过程。如果策略提升之后的策略与之前相同说明此时策略迭代算法已达到了收敛状态,此时的策略即为最优策略。 策略评估说白了就是计算当前策略下的状态价值函数。 首先来看一下之前提及的贝尔曼期望方程:Vπ(s)=∑a∈Aπ(a∣s)(r(s,a)+γ∑s′∈SP(s′∣s,a)Vπ(s′))V^{\pi}(s)=\sum_{a\in A}\pi(a|s)(r(s,a)+\gamma\sum_{s'\in S}P(s'|s,a)V^{\pi}(s')) V π ( s ) = a ∈ A ∑ π ( a ∣ s ) ( r ( s , a ) + γ s ′ ∈ S ∑ P ( s ′ ∣ s , a ) V π ( s ′ )) π(a∣s)\pi(a|s) π ( a ∣ s ) r(s,a),P(s′∣s,a)r(s,a),P(s'|s,a) r ( s , a ) , P ( s ′ ∣ s , a ) ss s s′s' s ′ ss s 策略评估是一个循环迭代的过程,第k+1轮中状态ss s s′s' s ′ 策略评估之后,我们获得了在当前策略下所有状态的价值函数,也就是得到了在当前策略下每个状态出发到达终结状态的期望回报。得到了状态价值函数,也就相当于得到了动作价值函数。我们便可以在当前策略的基础上每个状态都贪心地选择最优的动作aa a Qπ(s,a)Q^{\pi}(s,a) Q π ( s , a ) π′(s)=argmaxaQπ(s,a)=argmaxa{r(s,a)+γ∑s′P(s′∣s,a)Vπ(s′)}\begin{equation} \begin{split} \pi'(s)&=\arg \max_aQ^{\pi}(s,a)\\ &=\arg \max_a\{r(s,a)+\gamma \sum_{s'}P(s'|s,a)V^{\pi}(s')\}\\ \end{split} \end{equation} π ′ ( s ) = arg a max Q π ( s , a ) = arg a max { r ( s , a ) + γ s ′ ∑ P ( s ′ ∣ s , a ) V π ( s ′ )} 贪心算法与贪心策略我们需要考虑的问题是,局部最优的累积最终是否达到全局最优。在策略提升中需要考虑的问题是,每个状态都选择动作价值最大的动作得到的新策略π′\pi' π ′ π\pi π Vπ(s)≤Qπ(s,π′(s))=Eπ′[Rt+γVπ(St+1)∣St=s]≤Eπ′[Rt+γQπ(St+1,π′(St+1))∣St=s]=Eπ′[Rt+γRt+1+γ2Vπ(St+2)∣St=s]≤Eπ′[Rt+γRt+1+γ2Rt+2+γ3Vπ(St+3)∣St=s]...≤Eπ′[Rt+γRt+1+γ2Rt+2+γ3Rt+3+...∣St=s]=Vπ′(s)\begin{equation} \begin{split} V^{\pi}(s)&\le Q^{\pi}(s,\pi'(s))\\ &=E_{\pi'}[R_t+\gamma V^{\pi}(S_{t+1})|S_t=s]\\ &\le E_{\pi'}[R_t+\gamma Q^{\pi}(S_{t+1},\pi'(S_{t+1}))|S_t=s]\\ &=E_{\pi'}[R_t+\gamma R_{t+1}+\gamma^2 V^{\pi}(S_{t+2})|S_t=s]\\ &\le E_{\pi'}[R_t+\gamma R_{t+1}+\gamma^2 R_{t+2} + \gamma^3 V^{\pi}(S_{t+3}) |S_t=s] \\ &...\\ &\le E_{\pi'}[R_t+\gamma R_{t+1}+\gamma^2 R_{t+2} + \gamma^3 R_{t+3}+... |S_t=s]\\ &=V^{\pi'}(s) \end{split} \end{equation} V π ( s ) ≤ Q π ( s , π ′ ( s )) = E π ′ [ R t + γ V π ( S t + 1 ) ∣ S t = s ] ≤ E π ′ [ R t + γ Q π ( S t + 1 , π ′ ( S t + 1 )) ∣ S t = s ] = E π ′ [ R t + γ R t + 1 + γ 2 V π ( S t + 2 ) ∣ S t = s ] ≤ E π ′ [ R t + γ R t + 1 + γ 2 R t + 2 + γ 3 V π ( S t + 3 ) ∣ S t = s ] ... ≤ E π ′ [ R t + γ R t + 1 + γ 2 R t + 2 + γ 3 R t + 3 + ...∣ S t = s ] = V π ′ ( s ) import copyclass PolicyIteration : """ 策略迭代算法 """ def __init__ ( self, env, theta, gamma) : self. env = envself. v = [ 0 ] * self. env. ncol * self. env. nrow self. pi = [ [ 0.25 , 0.25 , 0.25 , 0.25 ] for i in range ( self. env. ncol * self. env. nrow) ] self. theta = theta self. gamma = gamma def policy_evaluation ( self) : cnt = 1 while 1 : max_diff = 0 new_v = [ 0 ] * self. env. ncol * self. env. nrow for s in range ( self. env. ncol * self. env. nrow) : qsa_list = [ ] for a in range ( 4 ) : qsa = 0 for res in self. env. P[ s] [ a] : p, next_state, r, done = resqsa += p * ( r + self. gamma * self. v[ next_state] * ( 1 - done) ) qsa_list. append( self. pi[ s] [ a] * qsa) new_v[ s] = sum ( qsa_list) max_diff = max ( max_diff, abs ( new_v[ s] - self. v[ s] ) ) self. v = new_vif max_diff < self. theta: break cnt += 1 print ( "策略评估进行%d轮后完成" % cnt) def policy_improvement ( self) : for s in range ( self. env. nrow * self. env. ncol) : qsa_list = [ ] for a in range ( 4 ) : qsa = 0 for res in self. env. P[ s] [ a] : p, next_state, r, done = resqsa += p * ( r + self. gamma * self. v[ next_state] * ( 1 - done) ) qsa_list. append( qsa) maxq = max ( qsa_list) cntq = qsa_list. count( maxq) self. pi[ s] = [ 1 / cntq if q == maxq else 0 for q in qsa_list] print ( "策略提升完成" ) return self. pidef policy_iteration ( self) : while 1 : self. policy_evaluation( ) old_pi = copy. deepcopy( self. pi) new_pi = self. policy_improvement( ) if old_pi == new_pi: break
读者可能会纳闷为啥代码中qsa的计算方法与公式不同?具体来说,公式中状态转移概率在括号内部,代码中状态转移概率在括号外部并且括号内还乘了(1−done)(1-done) ( 1 − d o n e ) ss s aa a (1−done)(1-done) ( 1 − d o n e ) 策略提升部分,每次都是以混合策略的形式提升。得到每个状态ss s 11 1 一个完整的强化学习项目一般包含三大模块,具体来说是三个.py文件。env.py、RL_brain.py、main.py。其中env.py定义了该问题的环境,包括智能体与环境的交互过程以及可视化过程;RL_brain.py定义了该问题所使用的RL算法;main.py包含该问题的主控逻辑。 在策略迭代算法中显示定义了策略,策略具体来说是面对每个状态选择不同动作的混合策略。策略迭代的策略评估过程需要很多轮才可以收敛,整个算法运行下来需要很大的计算量。价值迭代算法直接通过选择最大化状态价值函数/动作价值函数来产生最优策略,每次“策略”更新(实际上就是状态价值函数更新)都只需要一次状态价值函数的更新。 状态价值函数的贝尔曼最优方程如下所示:V∗(s)=maxa∈A{r(s,a)+γ∑s′∈SP(s′∣s,a)V∗(s′)}V^*(s)=\max_{a\in A}\{r(s,a)+\gamma \sum_{s'\in S}P(s'|s,a)V^*(s')\} V ∗ ( s ) = a ∈ A max { r ( s , a ) + γ s ′ ∈ S ∑ P ( s ′ ∣ s , a ) V ∗ ( s ′ )} Vk+1(s)=maxa∈A{r(s,a)+γ∑s′∈SP(s′∣s,a)Vk(s′)}V^{k+1}(s)=\max_{a\in A}\{r(s,a)+\gamma \sum_{s'\in S}P(s'|s,a)V^k(s')\} V k + 1 ( s ) = a ∈ A max { r ( s , a ) + γ s ′ ∈ S ∑ P ( s ′ ∣ s , a ) V k ( s ′ )} Vk+1V^{k+1} V k + 1 VkV^k V k V∗(s)V^*(s) V ∗ ( s ) π(s)=argmaxa{r(s,a)+γ∑s′∈SP(s′∣s,a)V∗(s′)}\pi(s)=\arg \max_{a}\{r(s,a)+\gamma \sum_{s'\in S}P(s'|s,a)V^*(s')\} π ( s ) = arg a max { r ( s , a ) + γ s ′ ∈ S ∑ P ( s ′ ∣ s , a ) V ∗ ( s ′ )} 悬崖漫步环境下的价值迭代代码如下所示: class ValueIteration : """ 价值迭代算法 """ def __init__ ( self, env, theta, gamma) : self. env = envself. v = [ 0 ] * self. env. ncol * self. env. nrow self. theta = theta self. gamma = gammaself. pi = [ None for i in range ( self. env. ncol * self. env. nrow) ] def value_iteration ( self) : cnt = 0 while 1 : max_diff = 0 new_v = [ 0 ] * self. env. ncol * self. env. nrowfor s in range ( self. env. ncol * self. env. nrow) : qsa_list = [ ] for a in range ( 4 ) : qsa = 0 for res in self. env. P[ s] [ a] : p, next_state, r, done = resqsa += p * ( r + self. gamma * self. v[ next_state] * ( 1 - done) ) qsa_list. append( qsa) new_v[ s] = max ( qsa_list) max_diff = max ( max_diff, abs ( new_v[ s] - self. v[ s] ) ) self. v = new_vif max_diff < self. theta: break cnt += 1 print ( "价值迭代一共进行%d轮" % cnt) self. get_policy( ) def get_policy ( self) : for s in range ( self. env. nrow * self. env. ncol) : qsa_list = [ ] for a in range ( 4 ) : qsa = 0 for res in self. env. P[ s] [ a] : p, next_state, r, done = resqsa += p * ( r + self. gamma * self. v[ next_state] * ( 1 - done) ) qsa_list. append( qsa) maxq = max ( qsa_list) cntq = qsa_list. count( maxq) self. pi[ s] = [ 1 / cntq if q == maxq else 0 for q in qsa_list]




![[ web基础篇 ] Burp Suite 爆破 Basic 认证密码](https://img-blog.csdnimg.cn/ce5f519f3cf2432caa55d787e0a4b11e.png)