搜索
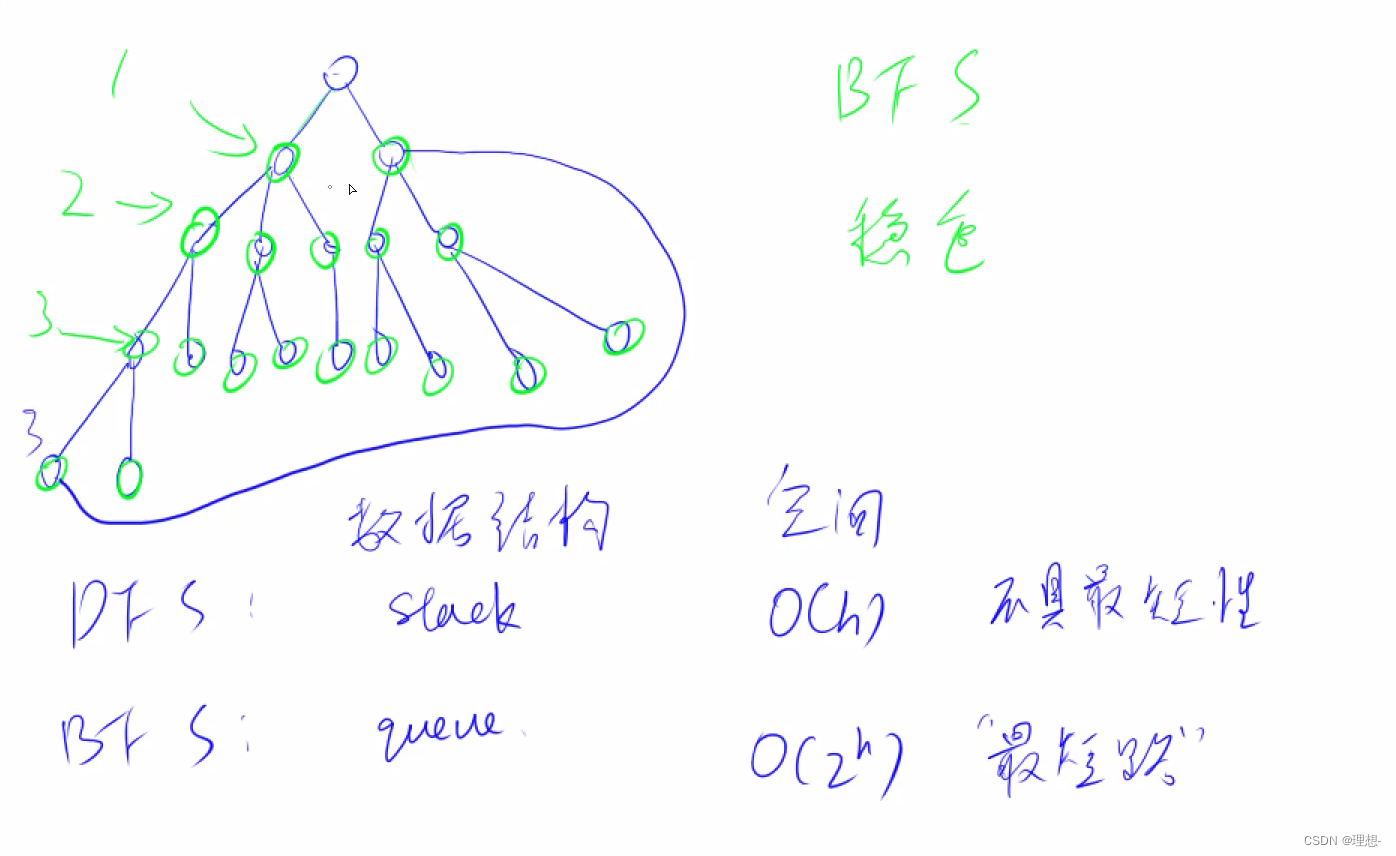
DFS
全排列
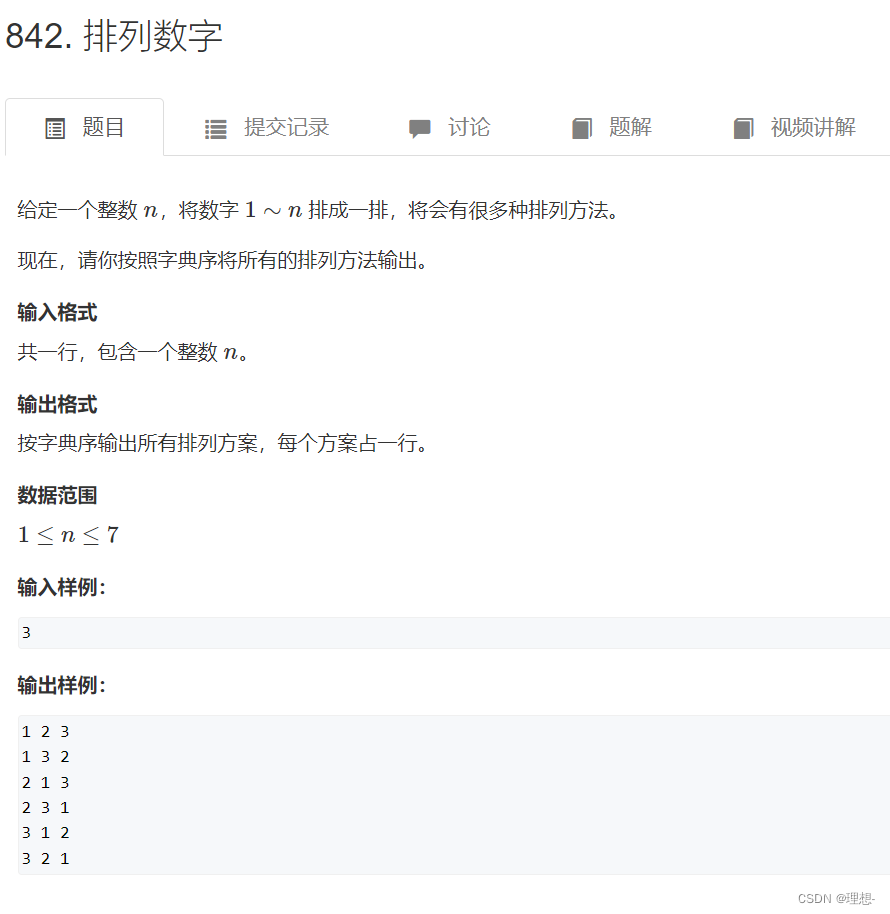
代码
#include<iostream>
using namespace std;int vis[10], a[10];void dfs(int step, int n)
{if (step == n + 1){for (int i = 1; i <= n; i++)printf("%d ", a[i]);printf("\n");return;}for (int i = 1; i <= n; i++){if (!vis[i]) {a[step] = i;vis[i] = 1;dfs(step + 1, n);vis[i] = 0;}}
}int main()
{int n;scanf("%d", &n);dfs(1, n);return 0;
}
n-皇后问题
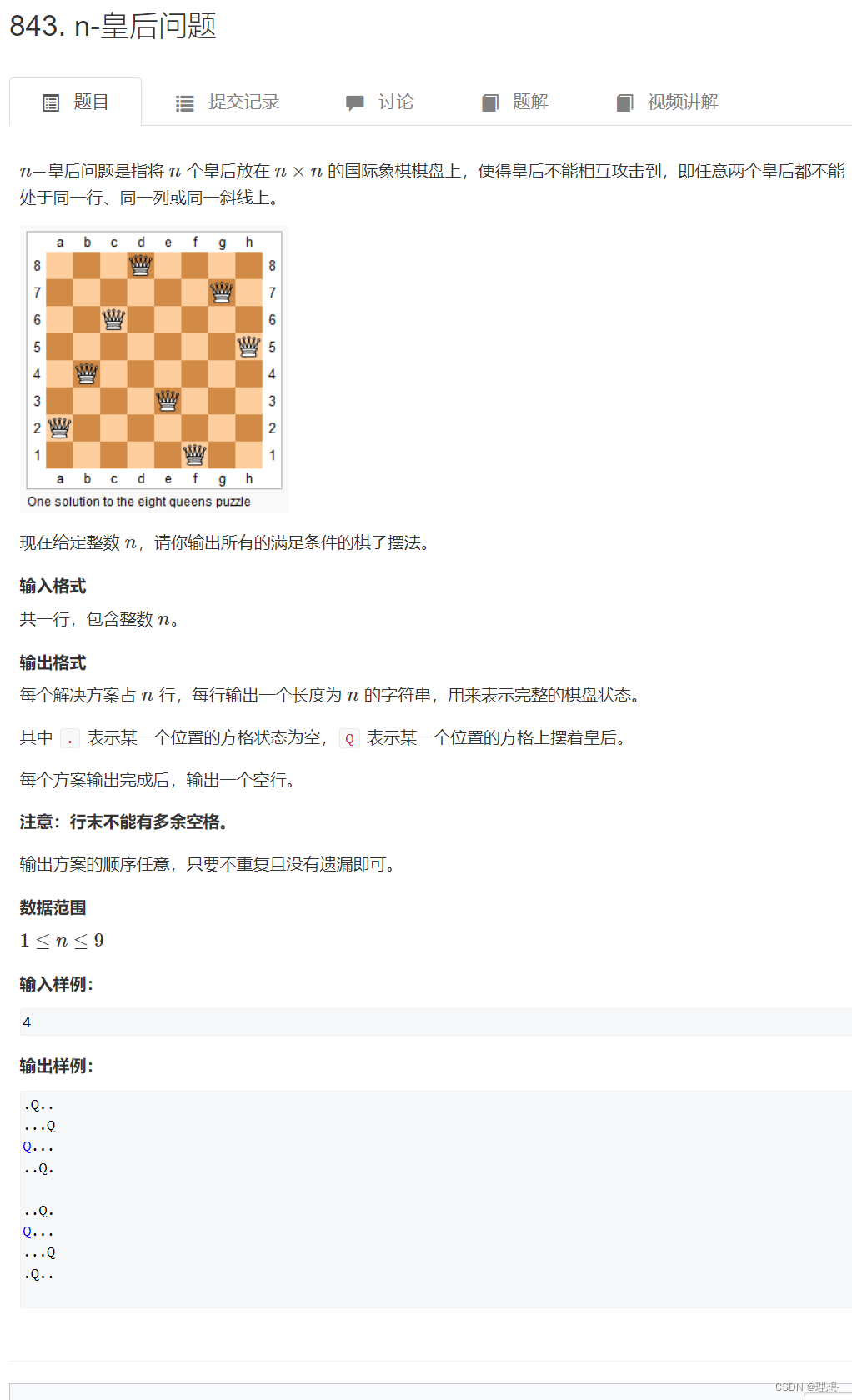
代码
第一种搜索顺序
#include<iostream>
using namespace std;const int N = 20;
bool col[N], dg[N], udg[N];
int n;
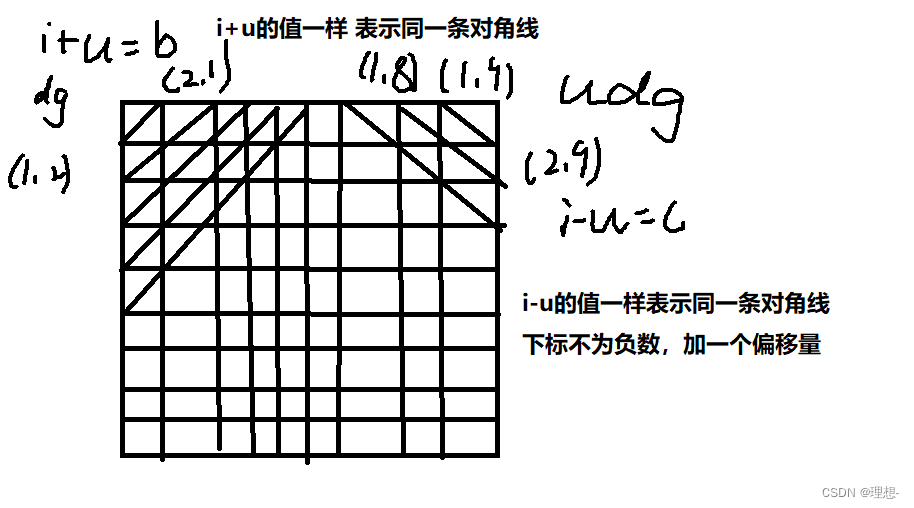
char g[N][N];void dfs(int u)
{if (u == n){for (int i = 0; i < n; i++) puts(g[i]);puts("");return;}for (int i = 0; i < n; i++){if (!col[i] && !dg[i + u] && !udg[n + i - u]){g[u][i] = 'Q';col[i] = dg[i + u] = udg[n + i - u] = true;dfs(u + 1);col[i] = dg[i + u] = udg[n + i - u] = false;g[u][i] = '.';}}
}int main()
{scanf("%d", &n);for (int i = 0; i < n; i++)for (int j = 0; j < n; j++)g[i][j] = '.';dfs(0);return 0;
}
第二种搜索顺序
#include<iostream>
using namespace std;const int N = 20;
bool row[N], col[N], dg[N], udg[N];
int n;
char g[N][N];void dfs(int x, int y, int s)
{if (y == n) y = 0, x++;if (x == n){if (s == n){for (int i = 0; i < n; i++) puts(g[i]);puts("");}return;}// 不放皇后dfs(x, y + 1, s);// 放皇后if (!row[x] && !col[y] && !dg[x + y] && !udg[n + x - y]){g[x][y] = 'Q';row[x] = col[y] = dg[x + y] = udg[n + x - y] = true;dfs(x, y + 1, s + 1);row[x] = col[y] = dg[x + y] = udg[n + x - y] = false;g[x][y] = '.';} }int main()
{scanf("%d", &n);for (int i = 0; i < n; i++)for (int j = 0; j < n; j++)g[i][j] = '.';dfs(0, 0, 0);return 0;
}
BFS
最短路
模板
queue<int> q;
st[1] = true; // 表示1号点已经被遍历过
q.push(1);while (q.size())
{int t = q.front();q.pop();for (int i = h[t]; i != -1; i = ne[i]){int j = e[i];if (!st[j]){st[j] = true; // 表示点j已经被遍历过q.push(j);}}
}
走迷宫
代码
#include<iostream>
#include<cstring>
using namespace std;typedef pair<int, int> PII;const int N = 110;
int g[N][N], d[N][N];
int hh, tt = -1, n, m;
PII q[N * N];int bfs()
{q[++tt] = {0, 0};d[0][0] = 0;int dx[4] = {-1, 0, 1, 0}, dy[4] = {0, 1, 0, -1};while (hh <= tt){PII t = q[hh++];for (int i = 0; i < 4; i++){int x = t.first + dx[i], y = t.second + dy[i];// 防止越界 当前位置距离为-1 无障碍时 更新距离if (x >= 0 && x < n && y >= 0 && y < m && g[x][y] == 0 && d[x][y] == -1){d[x][y] = d[t.first][t.second] + 1;q[++tt] = {x, y};}}}return d[n - 1][m - 1];
}int main()
{cin >> n >> m;memset(d, -1, sizeof d);for (int i = 0; i < n; i++)for (int j = 0; j < m; j++)cin >> g[i][j];cout << bfs() << endl;return 0;
}
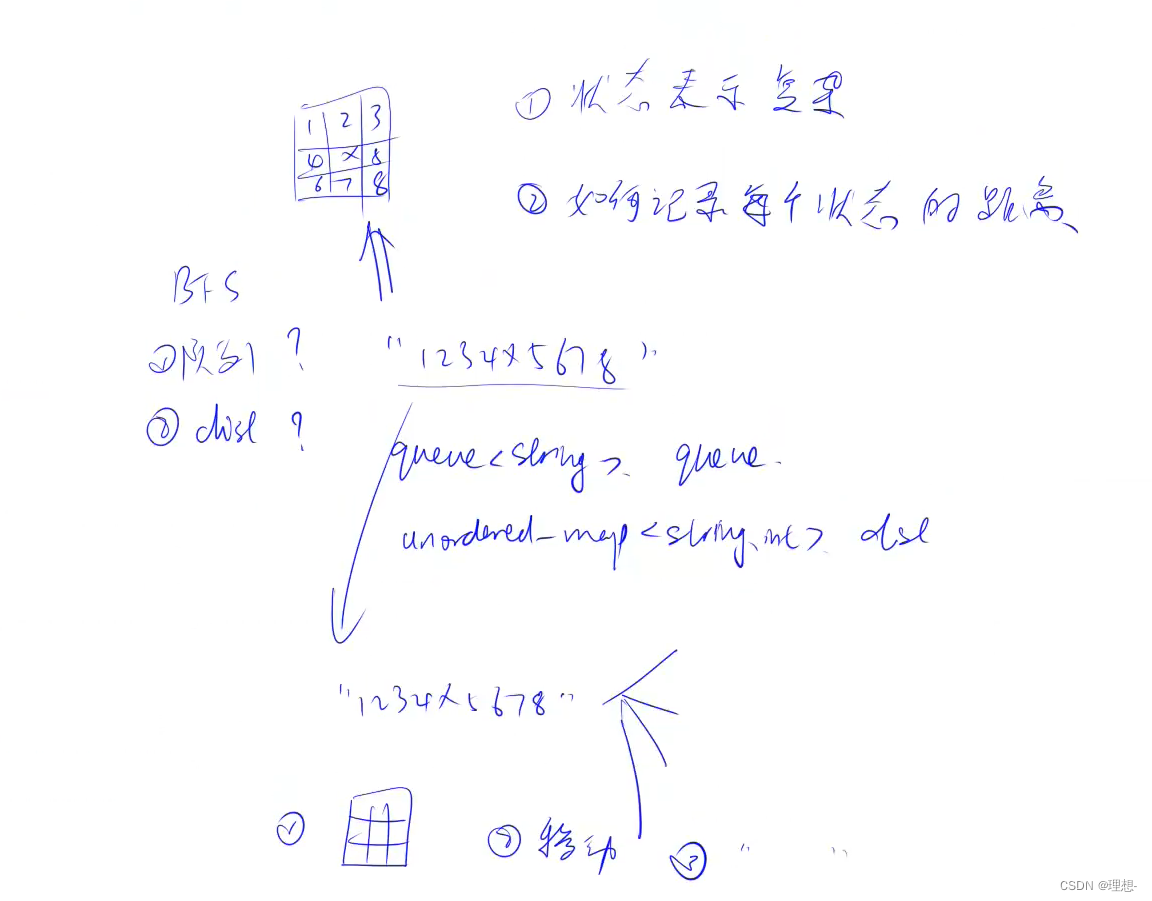
八数码
分析
用字符串表示状态,哈希表存储当前状态的距离。宽搜x与上下左右元素变换的每一个状态,更新距离,如果搜到终点状态,就返回距离,此距离即为最小变换次数。
代码
#include<iostream>
#include<unordered_map>
#include<queue>
using namespace std;int bfs(string start)
{// 终止状态string end = "12345678x";//哈希表存储距离unordered_map<string, int> d;//初始化距离d[start] = 0;queue<string> q;q.push(start);int dx[4] = {-1, 0, 1, 0}, dy[4] = {0, 1, 0, -1};while (q.size()){auto t = q.front();q.pop();int distance = d[t];//到达终止距离就返回if (t == end) return distance;int k = t.find('x');int x = k / 3, y = k % 3;for (int i = 0; i < 4; i++){int a = x + dx[i], b = y + dy[i];if (a >= 0 && a < 3 && b >= 0 && b < 3){//下一步的状态swap(t[k], t[a * 3 + b]);if (!d.count(t)){//更新距离d[t] = distance + 1;q.push(t);}//返回前一步swap(t[k], t[a * 3 + b]);}}}return -1;
}int main()
{string start;for (int i = 0; i < 9; i++){char c;cin >> c;start += c;}cout << bfs(start) << endl;return 0;
}
树与图
模板
邻接表
// 对于每个点k,开一个单链表,存储k所有可以走到的点。h[k]存储这个单链表的头结点
int h[N], e[N], ne[N], idx;// 添加一条边a->b
void add(int a, int b)
{e[idx] = b, ne[idx] = h[a], h[a] = idx ++ ;
}// 初始化
idx = 0;
memset(h, -1, sizeof h);
深度优先遍历
int dfs(int u)
{st[u] = true; // st[u] 表示点u已经被遍历过for (int i = h[u]; i != -1; i = ne[i]){int j = e[i];if (!st[j]) dfs(j);}
}
树的重心

分析
采用邻接表存储图。采用深度优先遍历,遍历每一个节点,返回当前包括当前节点a的树的节点个数。sum用来记录当前树的节点个数。s表示某一子树的节点个数,res记录子树节点个数的最大值。在记录删去当前节点a所在的树后剩余的节点树,再与ans取最小值即可。
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 100010, M = 2 * N;
int h[N], e[M], ne[M], idx;
int n;
int ans = N;
bool st[N];void add(int a, int b)
{e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}int dfs(int u)
{st[u] = true;int sum = 1, res = 0;for (int i = h[u]; i != -1; i = ne[i]){int j = e[i];if (!st[j]){int s = dfs(j);sum += s;// 当前节点子树的最大值res = max(s, res);}}// 删除该点后其他部分点数的最大值res = max(res, n - sum);//重心保证删除该点后剩余部分点数的最大值最小ans = min(ans, res);return sum;
}int main()
{cin >> n;memset(h, -1, sizeof h);for (int i = 0; i < n; i++){int a, b;cin >> a >> b;add(a, b), add(b, a);}//图当中的编号dfs(1);cout << ans << endl;return 0;
}
宽度优先遍历
图中点的层次
分析
数据范围比较小,稀疏图,可以用邻接表进行存储。采用宽度优先搜索,当前距离为-1时,更新距离。
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 100010;
int h[N], e[N], ne[N], idx;
int d[N];
int q[N], hh, tt = -1, n, m;void add(int a, int b)
{e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}int bfs()
{q[++tt] = 1;d[1] = 0;while (hh <= tt){int t = q[hh++];for (int i = h[t]; i != -1; i = ne[i]){int j = e[i];if (d[j] == -1){d[j] = d[t] + 1;q[++tt] = j;}}}return d[n];}int main()
{cin >> n >> m;memset(h, -1, sizeof h);memset(d, -1, sizeof d);for (int i = 0; i < m; i++){int a, b;cin >> a >> b;add(a, b);}cout << bfs() << endl;return 0;}
有向图的拓扑序列
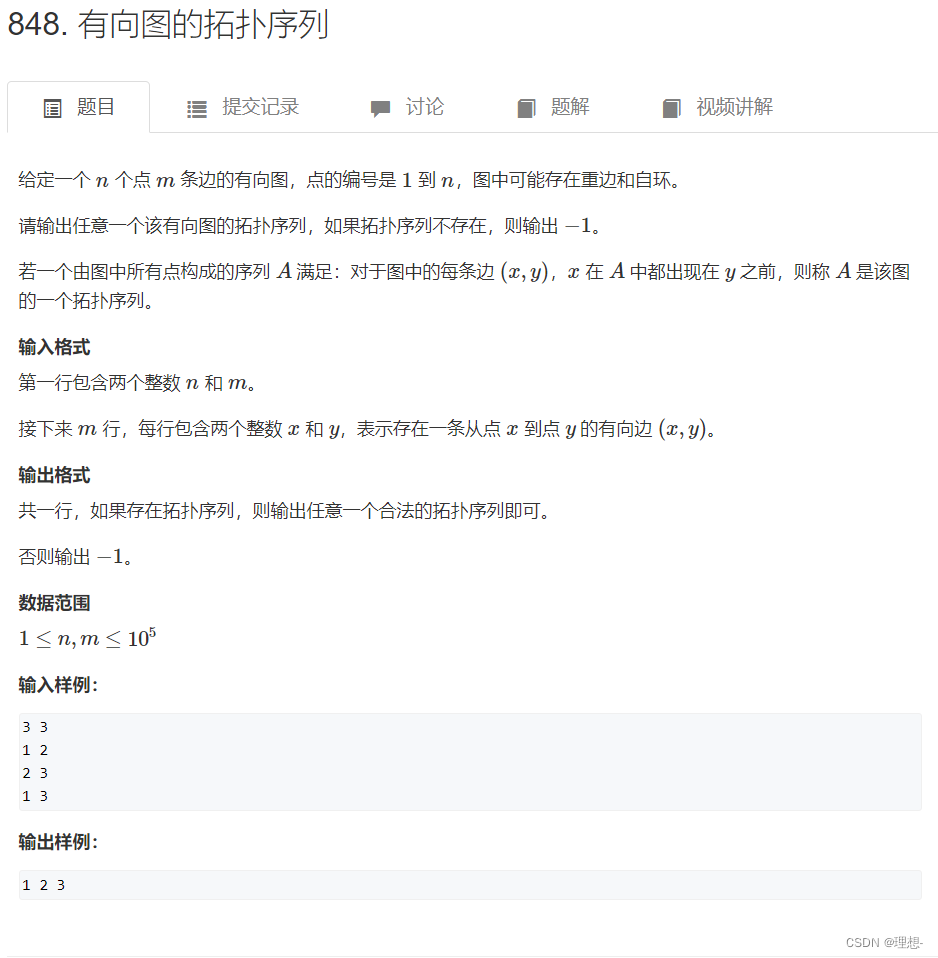
分析
拓扑序列从入度为0的顶点开始,若去除该点到另一个点的边使得另一个点入度也为0,则这个点也应放到拓扑序列中,用队列来存储拓扑序列,若所有的点都在队列中,则存在拓扑序列,队列的序列即为拓扑序列,反之则不存在拓扑序列。
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 100010;
int h[N], e[N], ne[N], idx;
int q[N], in[N], hh, tt = -1;
int n, m;void add(int a, int b)
{e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}bool topsort()
{//将所有入度为0的点入队for (int i = 1; i <= n; i++)if (!in[i]) q[++tt] = i;while (hh <= tt){int t = q[hh++];for (int i = h[t]; i != -1; i = ne[i]){int j = e[i];//去一条边 入度-1in[j]--;//入度为0 入队if (!in[j]) q[++tt] = j;}}return tt == n - 1;}int main()
{cin >> n >> m;memset(h, -1, sizeof h);while (m--){int a, b;cin >> a >> b;add(a, b);//点b的入度+1in[b]++;}if (topsort()){//拓扑序列就是队列的顺序for (int i = 0; i <= tt; i++) cout << q[i] << ' ';cout << endl;}else cout << -1;return 0;
}
最短路
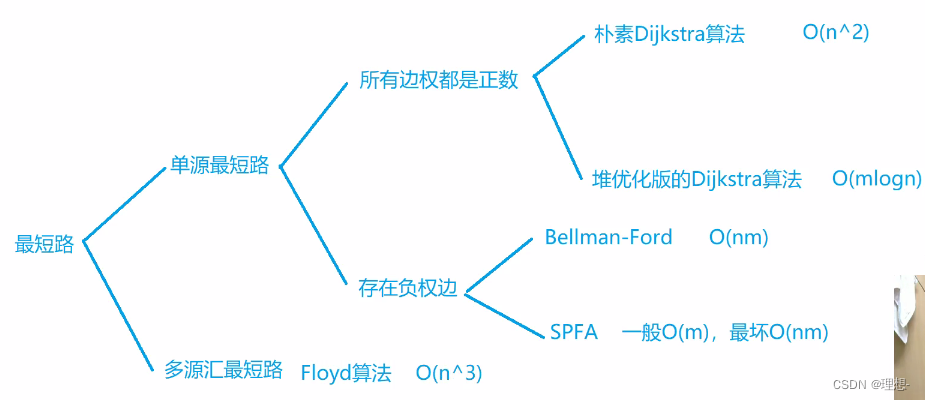
正权图 Dijkstra
n 点数 m边数
稠密图:朴素Dijkstra
稀疏:堆优化
朴素Dijkstra
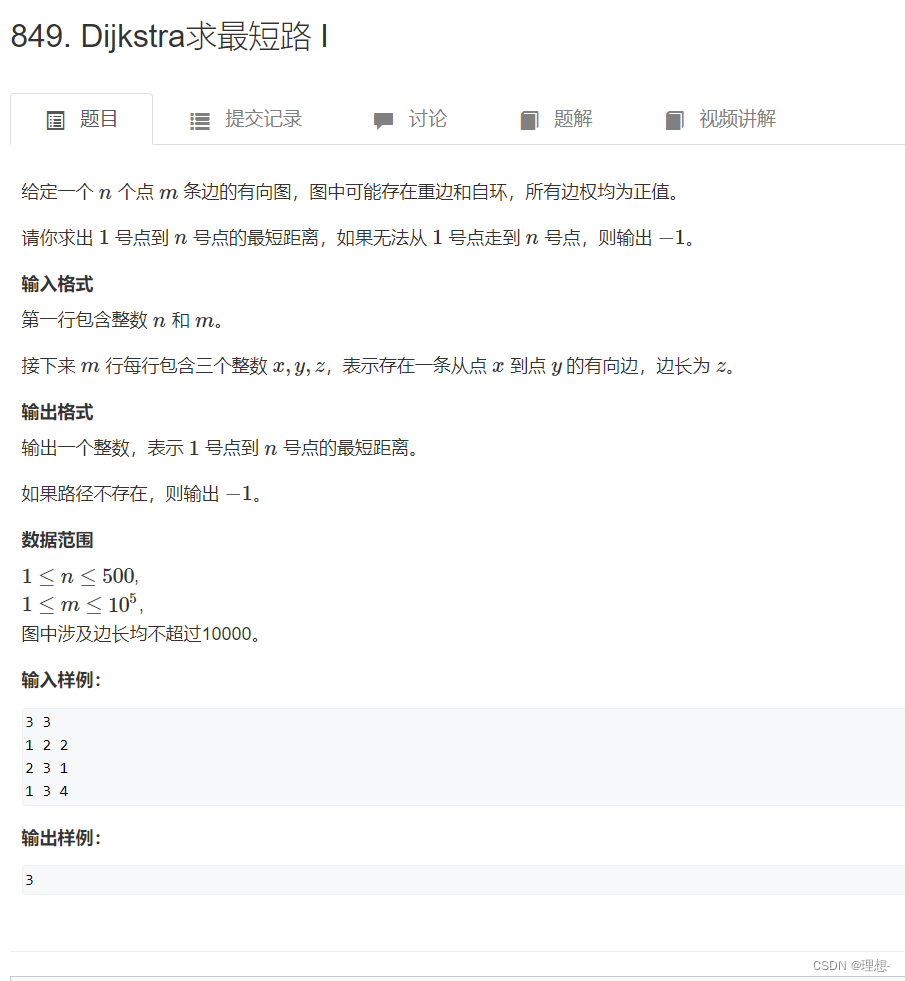
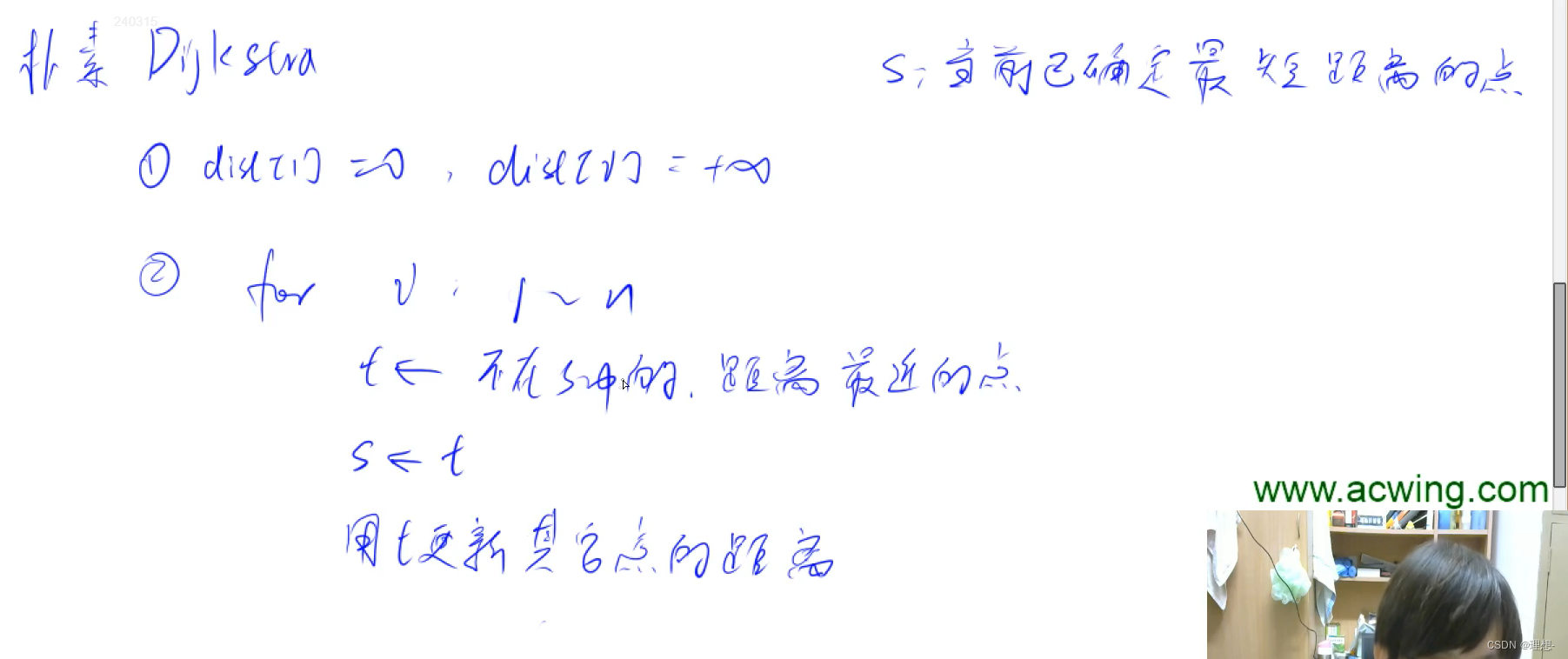
分析
朴素Dijkstra算法适用于求稠密图的单源最短路径问题,思想是进行n次迭代,每次从所有的未被访问过的点中找一个距离1号点最近的点,标志它被访问过了,再用该点去更新其他点的最短距离。
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 510;
int g[N][N];
bool vis[N];
int d[N], n, m;int dijkstra()
{memset(d, 0x3f, sizeof d);d[1] = 0;for (int i = 1; i <= n; i++){int t = -1;for (int j = 1; j <= n; j++){if (!vis[j] && (t == -1 || d[t] > d[j])) t = j;}vis[t] = true;for (int j = 1; j <= n; j++)d[j] = min(d[j], d[t] + g[t][j]);}return d[n] == 0x3f3f3f3f ? -1 : d[n];}int main()
{cin >> n >> m;memset(g, 0x3f, sizeof g);while (m--){int x, y, z;cin >> x >> y >> z;//去重边g[x][y] = min(g[x][y], z);}cout << dijkstra() << endl;return 0;
}
堆优化Dijkstra
分析
堆优化Dijkstra算法适用于求稀疏图的单源最短路径问题,与朴素Dijkstra相比,堆优化Dijkstra算法用小根堆维护最短路径,采用优先队列实现,提高寻找最短边的效率。队头元素表示最短路径的距离以及当前的点。用队头元素更新其他点的最短路径。
代码
#include<iostream>
#include<cstring>
#include<queue>
using namespace std;typedef pair<int, int> PII;const int N = 100010;int h[N], e[N], ne[N], w[N], idx;
int d[N];
bool st[N];
int n, m;void add(int a, int b, int c)
{e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++;
}int dijkstra()
{memset(d, 0x3f, sizeof d);d[1] = 0;priority_queue<PII, vector<PII>, greater<PII>> heap;//第一关键字为距离, 默认以第一关键字排序heap.push({0, 1});while (heap.size()){auto t = heap.top();heap.pop();int v = t.second;//找未被访问的点if (st[v]) continue;st[v] = true;for (int i = h[v]; i != -1; i = ne[i]){int j = e[i];//更新最短路径if (d[j] > d[v] + w[i]){d[j] = d[v] + w[i];heap.push({d[j], j});}}}return d[n] == 0x3f3f3f3f ? -1 : d[n];}int main()
{scanf("%d%d", &n, &m);memset(h, -1, sizeof h);while (m -- ){int a, b, c;scanf("%d%d%d", &a, &b, &c);add(a, b, c);}cout << dijkstra() << endl;return 0;
}
负权图 bellman-ford
n次迭代,枚举所有的边,松弛最短路径
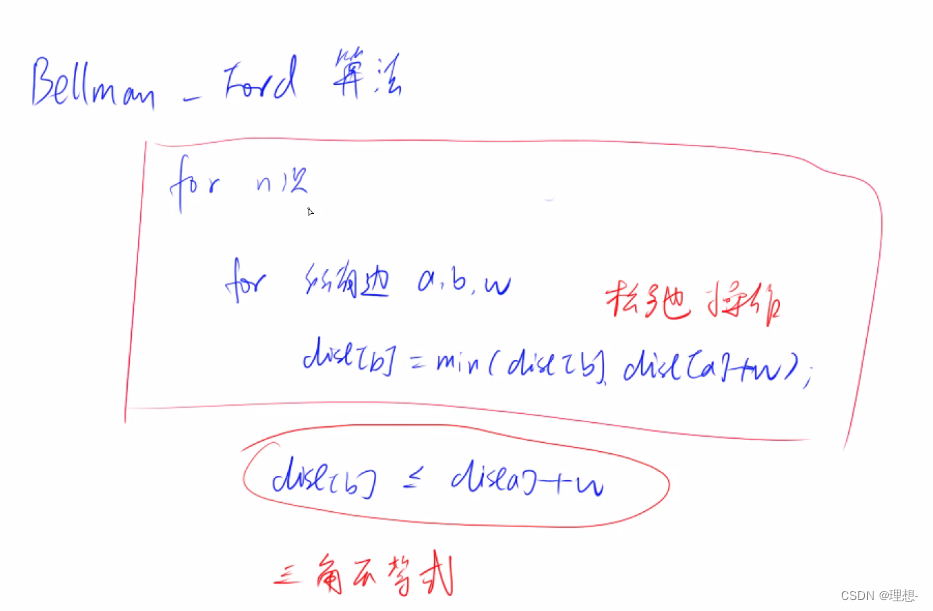
时间复杂度 O(nm), n表示点数,m表示边数
注意在模板题中需要对下面的模板稍作修改,加上备份数组,详情见模板题。
如果题目限制经过k条边求最短路径,只能用bellman-ford算法,可以有负环
模板
int n, m; // n表示点数,m表示边数
int dist[N]; // dist[x]存储1到x的最短路距离
bool f;struct Edge // 边,a表示出点,b表示入点,w表示边的权重
{int a, b, w;
}edges[M];// 求1到n的最短路距离,如果无法从1走到n,则返回-1。
int bellman_ford()
{memset(dist, 0x3f, sizeof dist);dist[1] = 0;// 如果第n次迭代仍然会松弛三角不等式,就说明存在一条长度是n+1的最短路径,由抽屉原理,路径中至少存在两个相同的点,说明图中存在负权回路。// 迭代不超过n条边for (int i = 0; i < n; i ++ ){for (int j = 0; j < m; j ++ ){int a = edges[j].a, b = edges[j].b, w = edges[j].w;if (dist[b] > dist[a] + w)dist[b] = dist[a] + w;}}if (dist[n] > 0x3f3f3f3f / 2) return -1;return dist[n];
}
有边数限制的最短路
分析
备份数组的作用: 由于本题有边数的限制,不加备份的话可能会发生串联,如经过一条边求最短路径,1->2 : 1,1->3 :3,2->3 : 1,则有可能算出1->2->3 :2, 不满足经过一条边求最短路径的限制,所以只能用上一次的结果进行更新,而不能用当前的结果进行更新,所以需要备份。

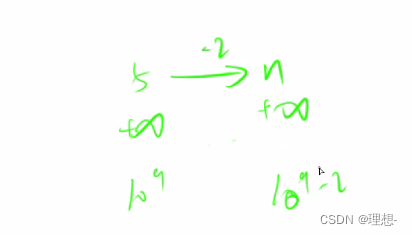
为什么这么判断:if (d[n] > 0x3f3f3f3f / 2) f = true;
因为存在负权边,比如1到不了5,1到5的距离为正无穷,1到不了n,1到n的距离为正无穷,5到n的距离为-2, 5把n的距离更新为无穷减去一个数,所以不能直接与无穷相比。在本题中,假设所有的边都为负权边,无穷加上所有的负权仍大于0x3f3f3f3f / 2,则不存在最短路径。
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 510, M = 100010;int d[N], backup[N];
struct Edge
{int a, b, w;
} edges[M];
int n, m, k;
bool f;int bellman_ford()
{memset(d, 0x3f, sizeof d);d[1] = 0;for (int i = 0; i < k; i++){memcpy(backup, d, sizeof d);for (int j = 0; j < m; j++){int a = edges[j].a, b = edges[j].b, w = edges[j].w;d[b] = min(d[b], backup[a] + w);}}if (d[n] > 0x3f3f3f3f / 2) f = true;return d[n];}int main()
{cin >> n >> m >> k;for (int i = 0; i < m; i++){int x, y, z;cin >> x >> y >> z;edges[i] = {x, y, z};}int t = bellman_ford();if (f) puts("impossible");else cout << t << endl;return 0;
}
负权图 spfa
正权图负权图都可以使用,但有可能被卡。
模板
int n; // 总点数
int h[N], w[N], e[N], ne[N], idx; // 邻接表存储所有边
int dist[N]; // 存储每个点到1号点的最短距离
bool st[N]; // 存储每个点是否在队列中// 求1号点到n号点的最短路距离,
int spfa()
{memset(dist, 0x3f, sizeof dist);dist[1] = 0;queue<int> q;q.push(1);st[1] = true;while (q.size()){//拿更新过的边去更新别的边auto t = q.front();q.pop();st[t] = false;for (int i = h[t]; i != -1; i = ne[i]){int j = e[i];if (dist[j] > dist[t] + w[i]){dist[j] = dist[t] + w[i];if (!st[j]) // 如果队列中已存在j,则不需要将j重复插入{q.push(j);st[j] = true;}}}}// 不存在最短路径if (dist[n] == 0x3f3f3f3f) f = true;return dist[n];
}spfa求最短路
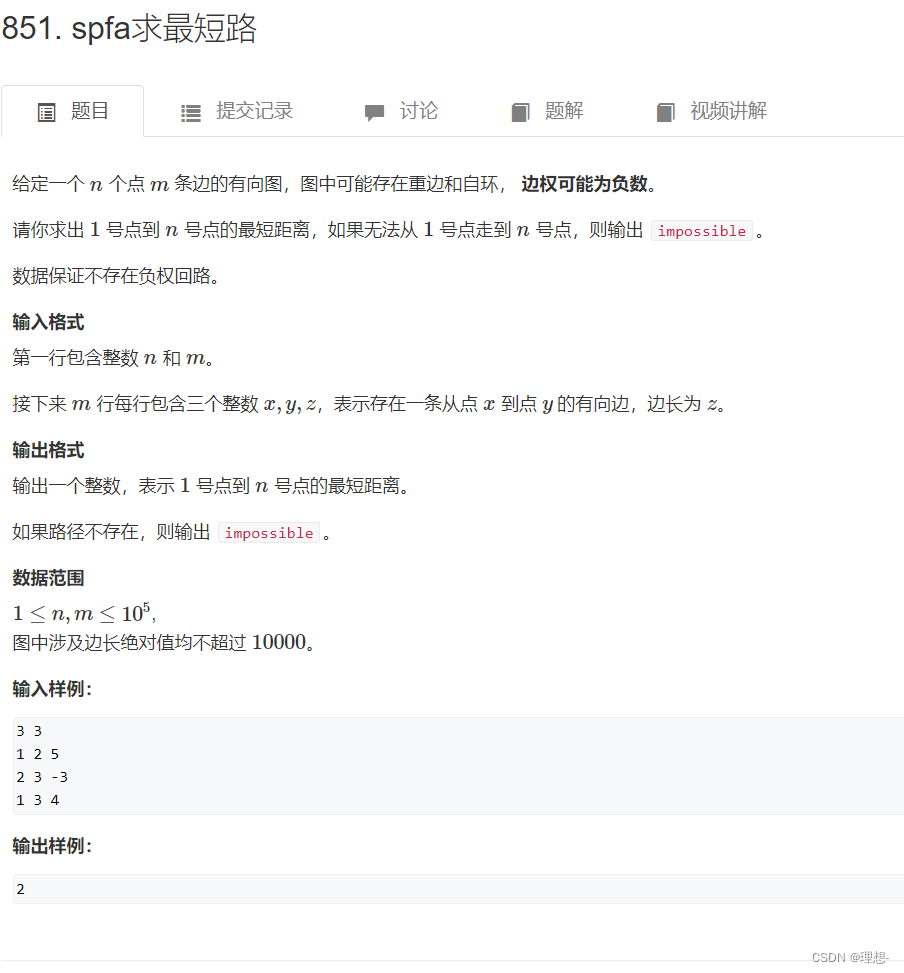
分析
spfa是优化了的bellman-ford算法,每次拿更新过的点去更新其他点的距离。
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 100010;int h[N], e[N], ne[N], w[N], idx;
int q[N], hh, tt = -1;
int d[N];
bool st[N];
int n, m;void add(int a, int b, int c)
{e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++;
}int spfa()
{memset(d, 0x3f, sizeof d);d[1] = 0;q[++tt] = 1;st[1] = true;while (hh <= tt){int t = q[hh++];st[t] = false;for (int i = h[t]; i != -1; i = ne[i]){int j = e[i];if (d[j] > d[t] + w[i]){d[j] = d[t] + w[i];if (!st[j]){q[++tt] = j;st[j] = true;}}}}return d[n];}int main()
{scanf("%d%d", &n, &m);memset(h, -1, sizeof h);while (m -- ){int a, b, c;scanf("%d%d%d", &a, &b, &c);add(a, b, c);}int t = spfa();// 不需要d[n] > 0x3f3f3f3f / 2的条件// 因为队列里都是由起点更新到的点,不存在bellman-ford算法中未更新的点同样被边更新的情况if (t == 0x3f3f3f3f) puts("impossible");else cout << t << endl;return 0;
}
spfa判断负环
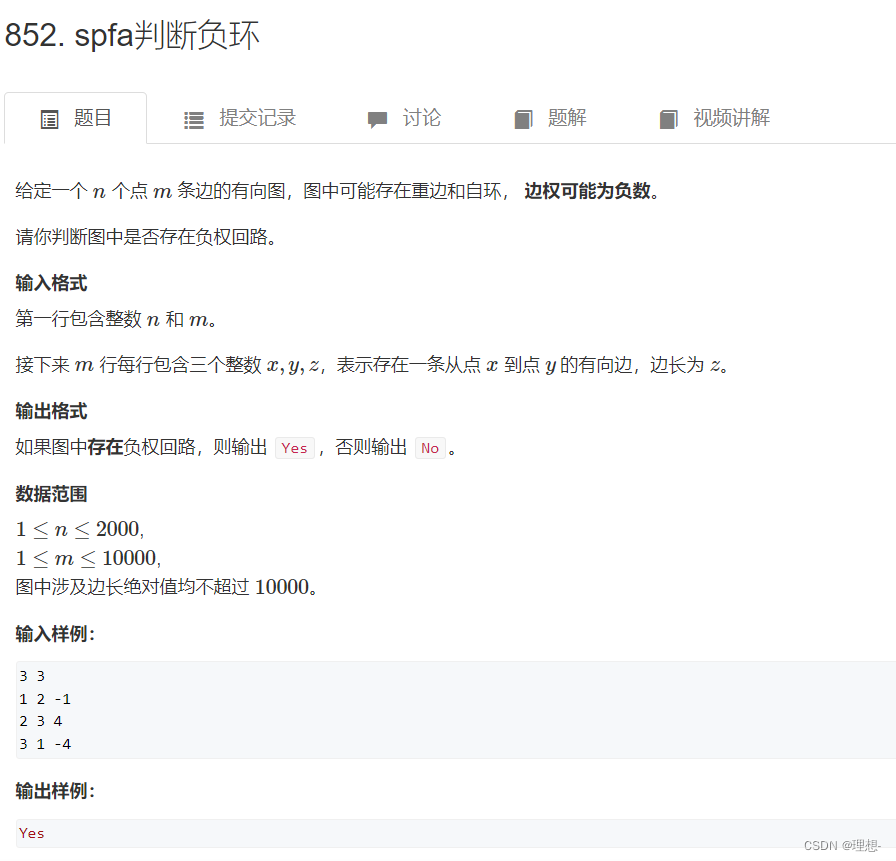
分析
在计算过程中维护cnt数组,用来表示1到该点的边数,如果边数大于等于n时,则经过n+1的点,由于抽屉原理,经过了相同的点,可以判断有负环。因为不是判断1到其他点的负环,而是判断有负环,一开始要把所有的点加入队列中。
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 10010;int h[N], e[N], ne[N], w[N], idx;
int q[N], hh, tt = -1;
int d[N], cnt[N];
bool st[N];
int n, m;void add(int a, int b, int c)
{e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++;
}// 如果存在负环,则返回true,否则返回false。
bool spfa()
{// 不需要初始化d数组// 原理:如果某条最短路径上有n个点(除了自己),那么加上自己之后一共有n+1个点,// 由抽屉原理一定有两个点相同,所以存在环。for (int i = 1; i <= n; i++){q[++tt] = i;st[i] = true;}while (hh <= tt){int t = q[hh++];st[t] = false;for (int i = h[t]; i != -1; i = ne[i]){int j = e[i];if (d[j] > d[t] + w[i]){d[j] = d[t] + w[i];cnt[j] = cnt[t] + 1;if (cnt[j] >= n) return true;if (!st[j]){q[++tt] = j;st[j] = true;}}}}return false;}int main()
{scanf("%d%d", &n, &m);memset(h, -1, sizeof h);while (m -- ){int a, b, c;scanf("%d%d%d", &a, &b, &c);add(a, b, c);}if (spfa()) puts("Yes");else puts("No");return 0;
}
Floyd求最短路
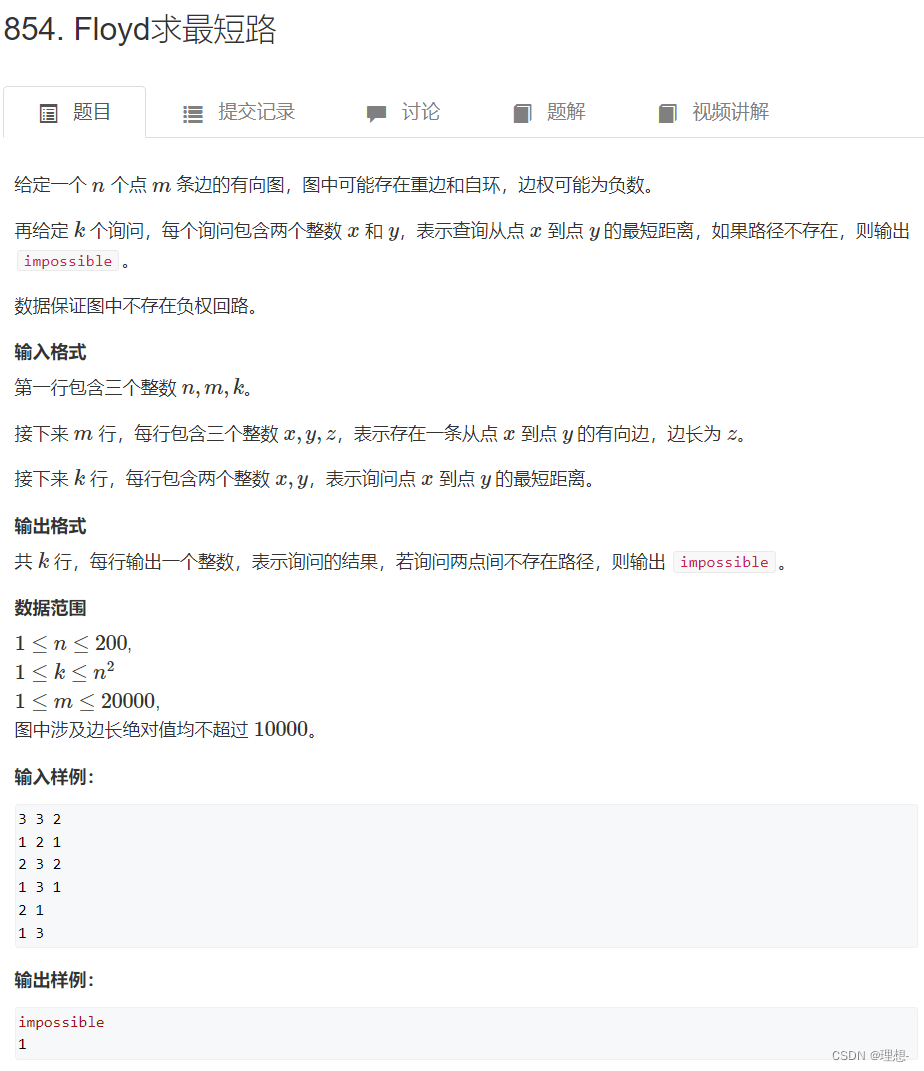
代码
#include <iostream>
using namespace std;const int N = 210, inf = 1e9;
int d[N][N];
int n, m, k;void floyd()
{for (int k = 1; k <= n; k++)for (int i = 1; i <= n; i++)for (int j = 1; j <= n; j++)d[i][j] = min(d[i][j], d[i][k] + d[k][j]);}int main()
{scanf("%d%d%d", &n, &m, &k);for (int i = 1; i <= n; i++)for (int j = 1; j <= n; j++){if (i == j) d[i][j] = 0;else d[i][j] = inf;}for (int i = 1; i <= m; i++){int x, y, z;scanf("%d%d%d", &x, &y, &z);d[x][y] = min(d[x][y], z);}floyd();while (k--){int x, y;scanf("%d%d", &x, &y);if (d[x][y] > inf / 2) puts("impossible");else printf("%d\n", d[x][y]);}return 0;
}
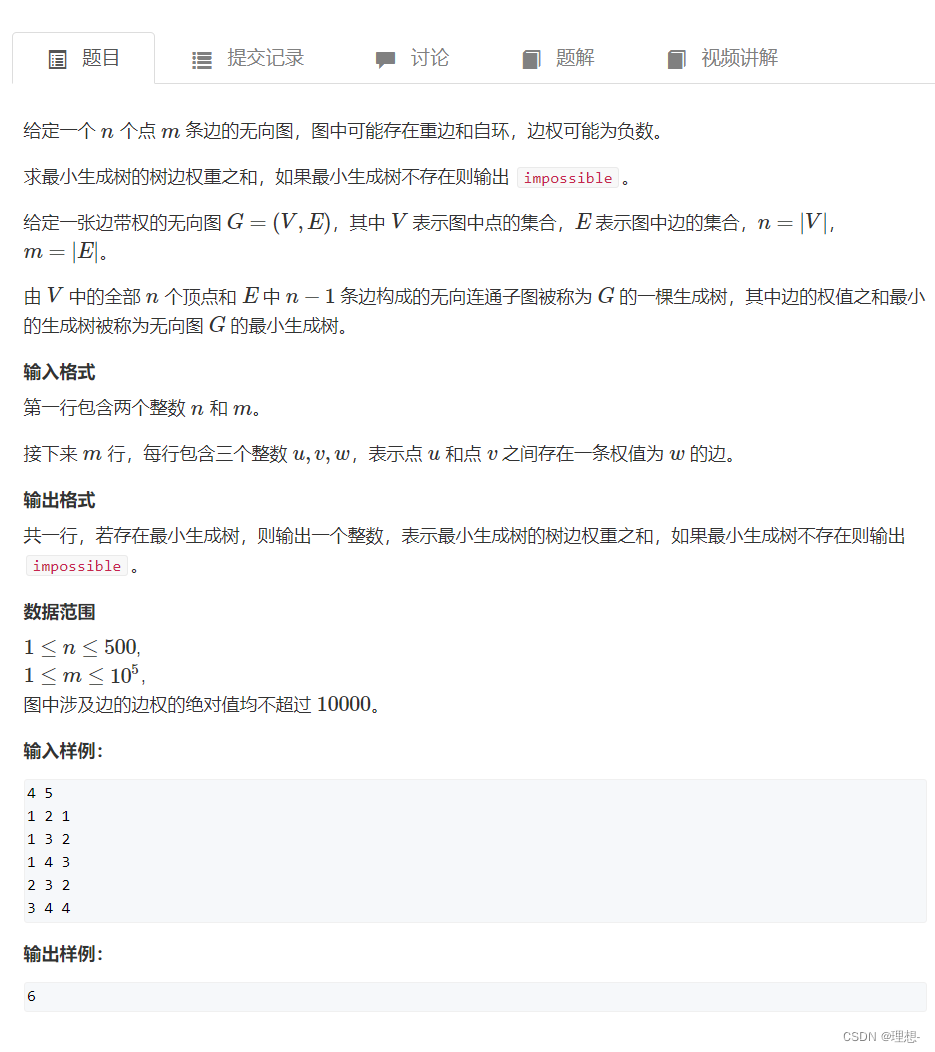
最小生成树
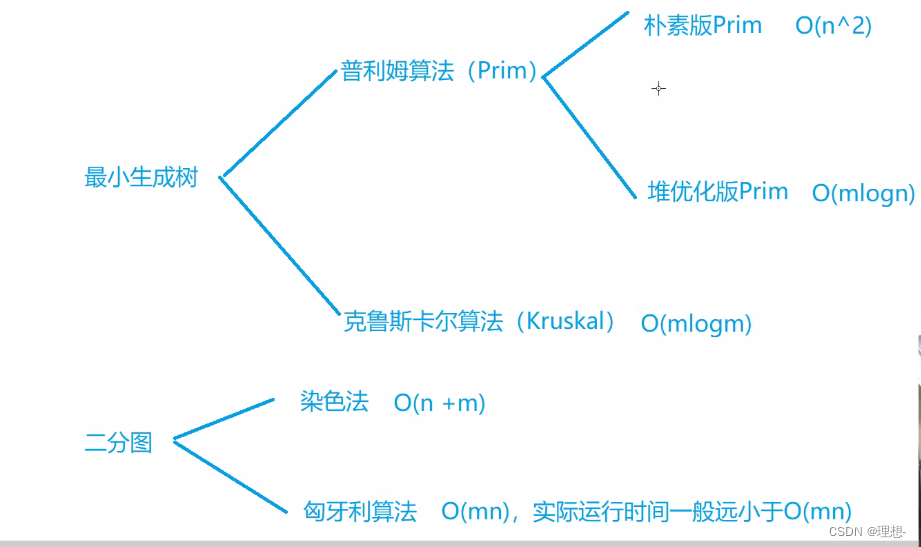
Prim
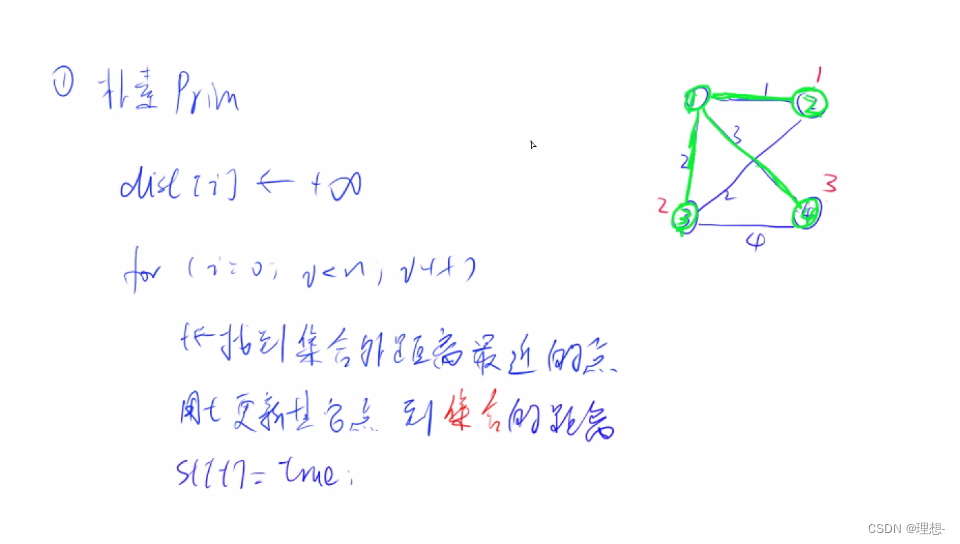
思想: 初始化所有点的距离为无穷,找到集合外距离集合最近的点t,用t更新其他点到集合的距离,并对该点打标记。跟朴素Dijkstra算法思想类似。
代码
#include <iostream>
#include <cstring>
using namespace std;const int N = 510, inf = 0x3f3f3f3f;
int g[N][N], d[N];
bool st[N];
int n, m;int prim()
{memset(d, 0x3f, sizeof d);int res = 0;for (int i = 0; i < n; i++){int t = -1;for (int j = 1; j <= n; j++)if (!st[j] && (t == -1 || d[t] > d[j])) t = j;//如果不是第一个点 并且找到的最小点的距离为inf, 则不构成最小生成树if (i && d[t] == inf) return inf;//如果不是第一个点, d[t]表示当前点与某一点连线的长度if (i) res += d[t];// 先加上,再更新,否则t=j时,自环更新长度for (int j = 1; j <= n; j++) d[j] = min(d[j], g[t][j]);st[t] = true;}return res;
}int main()
{scanf("%d%d", &n, &m);memset(g, 0x3f, sizeof g);while (m--){int a, b, c;scanf("%d%d%d", &a, &b, &c);g[a][b] = g[b][a] = min(g[a][b], c);}int t = prim();if (t == inf) puts("impossible");else printf("%d\n", t);return 0;
}
Kruskal
适合稀疏图
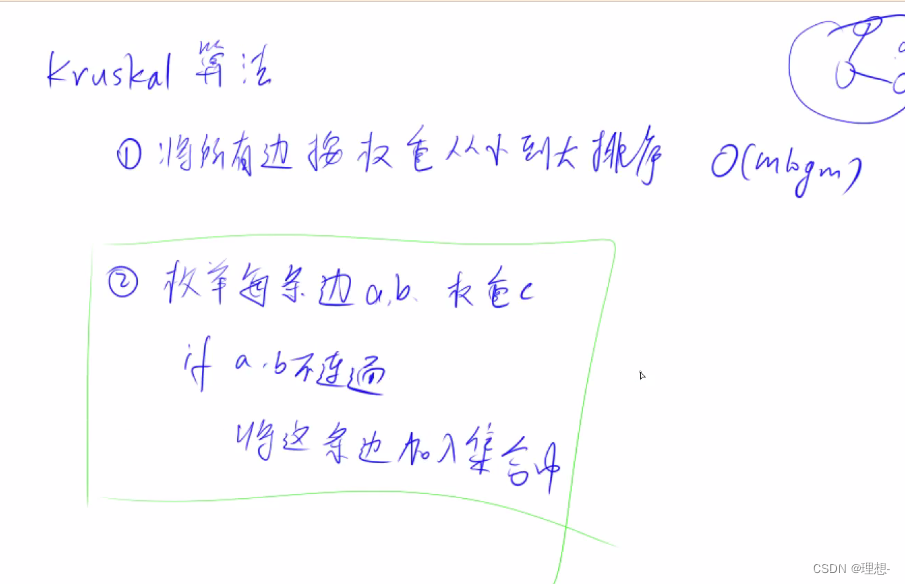
Kruskal算法求最小生成树
代码
#include<iostream>
#include<algorithm>
using namespace std;const int N = 100010, M = 2 * N;
int p[N], n, m;
struct Edge
{int a, b, w;bool operator< (const Edge &edge)const{return w < edge.w;}
}edges[M];int find(int x)
{if (p[x] != x) p[x] = find(p[x]);return p[x];
}int main()
{scanf("%d%d", &n, &m);for (int i = 1; i <= n; i++) p[i] = i;for (int i = 0; i < m; i++){int u, v, w;scanf("%d%d%d", &u, &v, &w);edges[i] = {u, v, w};}sort(edges, edges + m);int res = 0, cnt = 0;//遍历最短边for (int i = 0; i < m; i++){int a = edges[i].a, b = edges[i].b, w = edges[i].w;// 判断a b 是否在一个集合内a = find(a), b = find(b);if (a != b){res += w;cnt++;p[a] = b;}}if (cnt < n - 1) puts("impossible");else printf("%d", res);return 0;
}
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rKRg9CVK-1669449443875)(%E7%AC%AC%E4%B8%89%E7%AB%A0%20%E6%90%9C%E7%B4%A2%E4%B8%8E%E5%9B%BE%E8%AE%BA.assets/image-20221121081051462.png)]
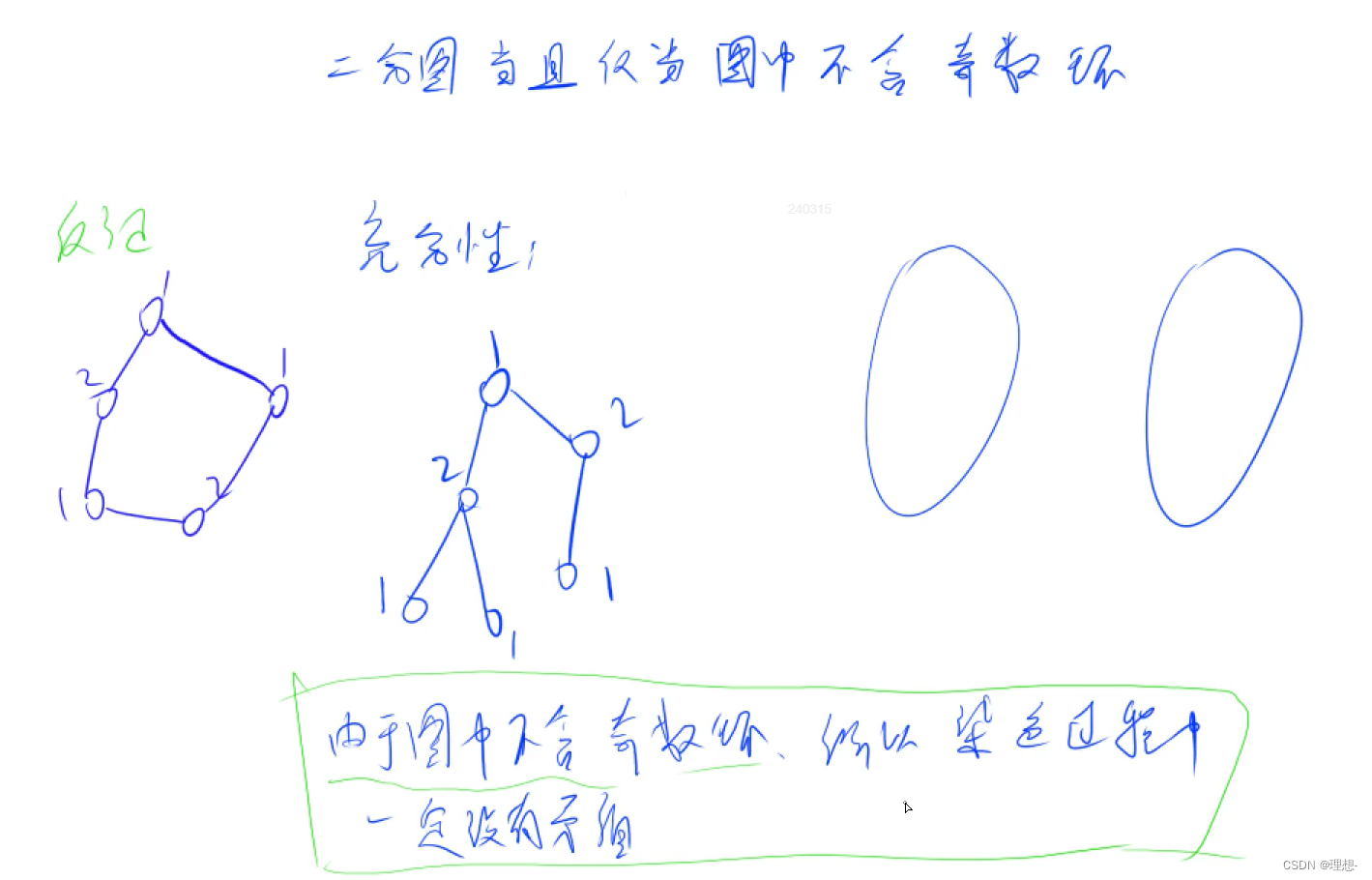
二分图
**性质:**一个图是二分图当且仅当图中不含有奇数环。
判定二分图
染色法判定二分图
分析
深度优先遍历所有未染色的点,对其染色,如果染色不成功就说明不是二分图。
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 100010, M = 2 * N;
int h[N], e[M], ne[M], idx;
int color[N];
int n, m;void add(int a, int b)
{e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}// 判断u染c是否染色成功,默认c 为1 2
bool dfs(int u, int c)
{color[u] = c;for (int i = h[u]; i != -1; i = ne[i]){int j = e[i];//未染色if (!color[j]){// 染色失败if (!dfs(j, 3 - c)) return false;}//染了同一种颜色else if (color[j] == c) return false;}return true;
}int main()
{scanf("%d%d", &n, &m);memset(h, -1, sizeof h);while (m--){int u, v;scanf("%d%d", &u, &v);add(u, v), add(v, u);}bool f = true;for (int i = 1; i <= n; i++){if (!color[i]){//先染1号颜色if (!dfs(i, 1)){f = false;break;}}}printf((f ? "Yes" : "No"));return 0;
}
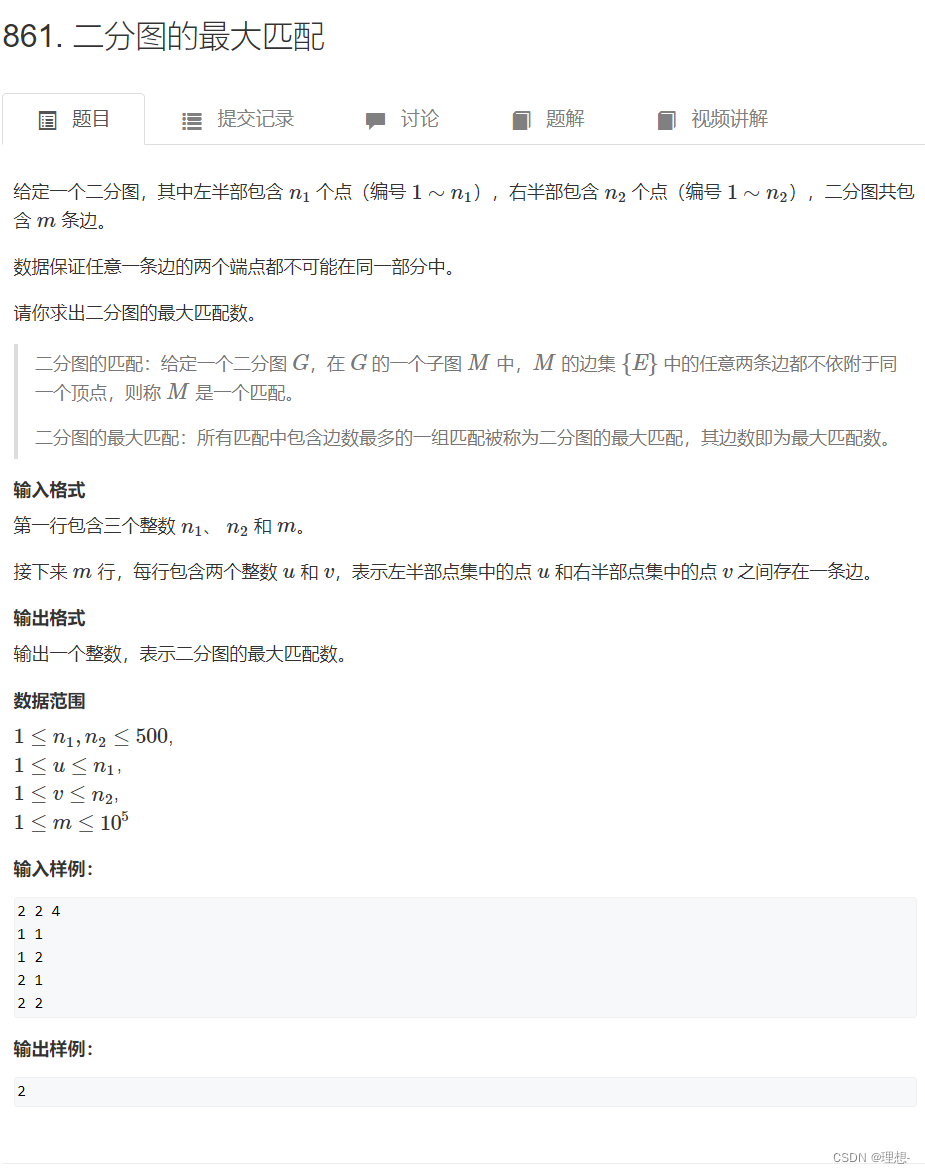
二分图最大匹配
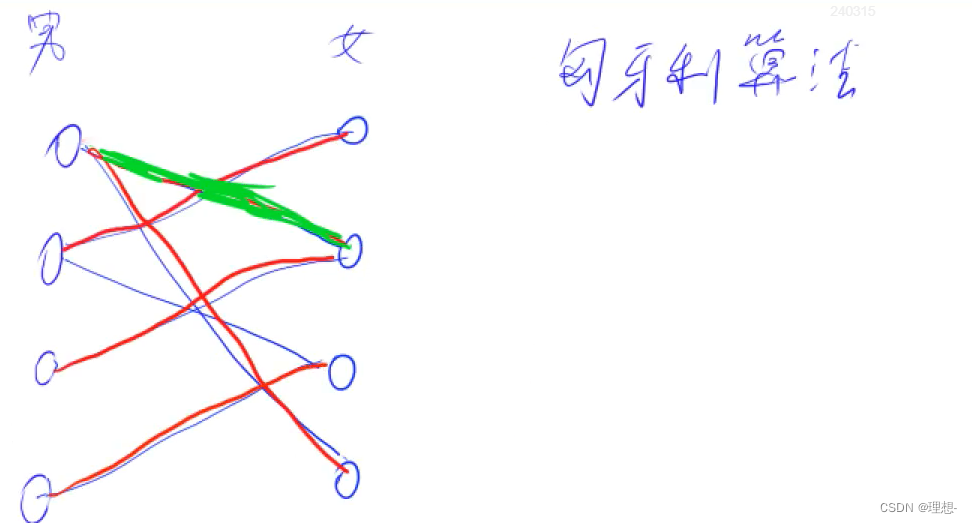
思想: 从前往后遍历所有的点,找与其可以匹配的点,如果当前遍历到的点a与可以匹配的点b已经与前面的点c相匹配,则判断c能否与另一点d匹配,如果可以,则a匹配b,c匹配d。
二分图的最大匹配
代码
#include<iostream>
#include<cstring>
using namespace std;const int N = 510, M = 100010;
int h[N], e[M], ne[M], idx;
int match[N], n1, n2, m;
bool st[N];void add(int a, int b)
{e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}bool find(int x)
{for (int i = h[x]; i != -1; i = ne[i]){int j = e[i];//没有访问过if (!st[j]){st[j] = true;// 没有匹配 或者可以匹配其他的if (!match[j] || find(match[j])){match[j] = x;return true;}}}return false;
}int main()
{scanf("%d%d%d", &n1, &n2, &m);memset(h, -1, sizeof h);while (m--){int u, v;scanf("%d%d", &u, &v);add(u, v);}int res = 0;for (int i = 1; i <= n1; i++){// 每次模拟匹配的预定情况都是不一样的,所以每轮模拟都要初始化memset(st, false, sizeof st);if (find(i)) res++;}printf("%d", res);return 0;
}




![[附源码]计算机毕业设计JAVA汽车租赁系统](https://img-blog.csdnimg.cn/6f7a202f91964d7382b633a5304333f0.png)