目录
优化器
优化器
官方文档地址:torch.optim![]() https://pytorch.org/docs/stable/optim.html
https://pytorch.org/docs/stable/optim.html
Debug过程中查看的grad所在的位置:
model --> Protected Atributes --> _modules --> ‘model’ --> Protected Atributes --> _modules --> ‘0’(任选一个conv层) --> weight(查看weight下的data和grad的变化)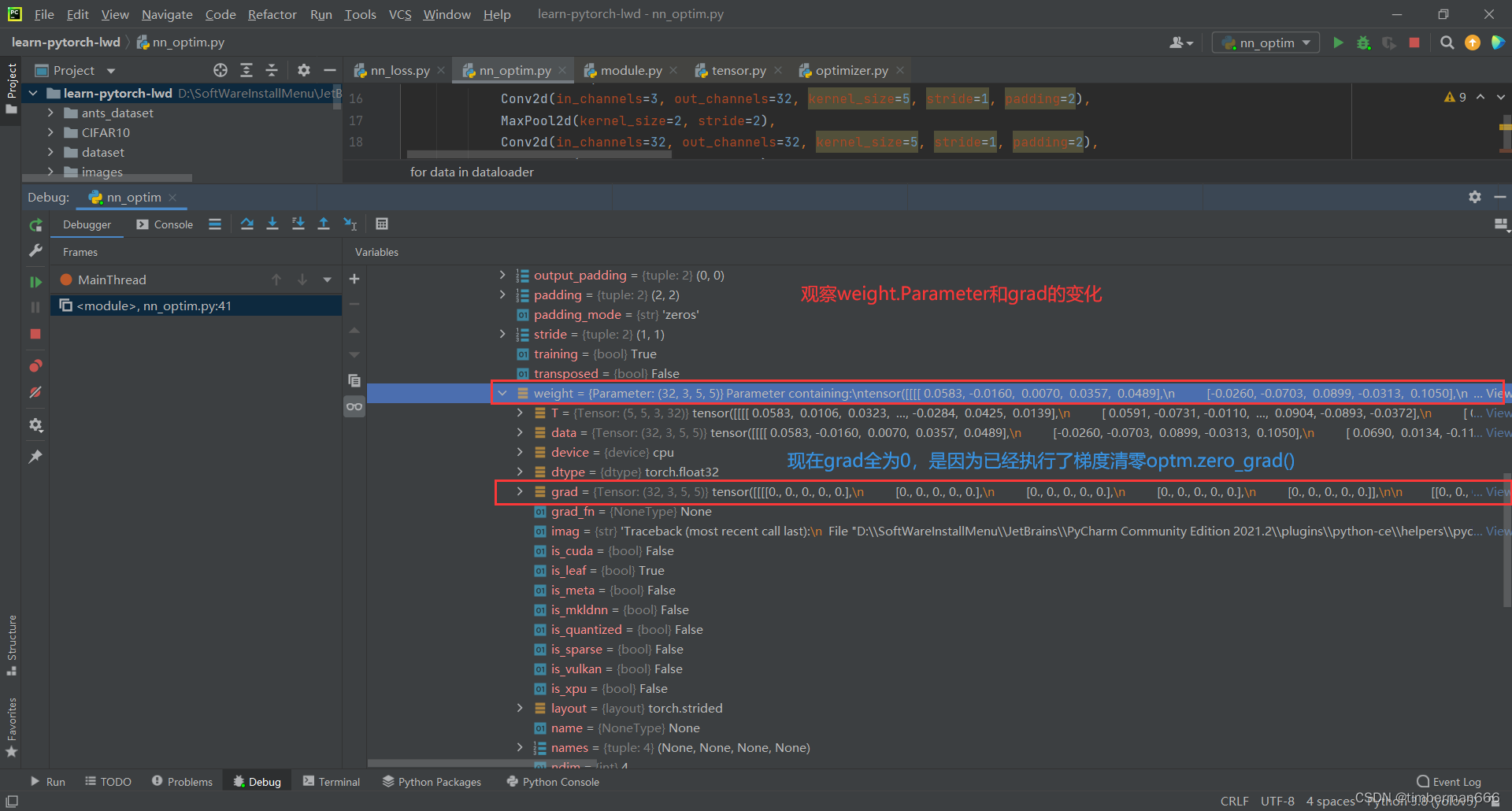
简易训练代码,添加了Loss、Optim。
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
from torchvision.transforms import transformsdataset = torchvision.datasets.CIFAR10('./dataset', train=False, transform=transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, batch_size=2, shuffle=True)class Model(nn.Module):def __init__(self):super(Model, self).__init__()self.model = Sequential(Conv2d(in_channels=3, out_channels=32, kernel_size=5, stride=1, padding=2),MaxPool2d(kernel_size=2, stride=2),Conv2d(in_channels=32, out_channels=32, kernel_size=5, stride=1, padding=2),MaxPool2d(kernel_size=2, stride=2),Conv2d(in_channels=32, out_channels=64, kernel_size=5, stride=1, padding=2),MaxPool2d(kernel_size=2, stride=2),Flatten(),Linear(1024, 64),Linear(64, 10))def forward(self, x): # 模型前向传播return self.model(x)model = Model() # 定义模型
loss_cross = nn.CrossEntropyLoss() # 定义损失函数
optim = torch.optim.SGD(model.parameters(), lr=0.01) # lr不能过大或者过小。刚开始的lr可设置得较大一点,后面再对lr进行调节
len = len(dataloader)for epoch in range(20):total_loss = 0.0for imgs, targets in dataloader:outputs = model(imgs)res_loss = loss_cross(outputs, targets)optim.zero_grad() # 优化器对model中的每一个参数进行梯度清零res_loss.backward() # 损失反向传播optim.step() # 对model参数开始调优total_loss += res_lossprint('epoch:{}\ttotal_loss:{}\tmean_loss:{}.'.format(epoch, total_loss, total_loss / len))
# epoch:0 total_loss:9374.806640625 mean_loss:1.8749613761901855.
# epoch:1 total_loss:7721.240234375 mean_loss:1.544248104095459.
# epoch:2 total_loss:6830.775390625 mean_loss:1.3661550283432007.