Ros-Mobile的使用基本熟悉,接下来熟悉代码,记录中间的问题。
GitHub - ROS-Mobile/ROS-Mobile-Android: Visualization and controlling application for Android
使用android studio打开项目后有bug。
BUG:
1.FAILURE: Build failed with an exception.
* Where:
Build file 'D:\AndroidCode\Robot\ROS-Mobile-Android-master\build.gradle' line: 6
* What went wrong:
A problem occurred evaluating root project 'RosAndroid'.
> Could not get resource 'https://github.com/rosjava/rosjava_bootstrap/raw/kinetic/buildscript.gradle'.
> Could not GET 'https://raw.githubusercontent.com/rosjava/rosjava_bootstrap/kinetic/buildscript.gradle'.
> raw.githubusercontent.com
打开连接,复制内容,然后存放到工程下,代码中直接加载文件,代码修改如下:
buildscript {//apply from: "https://github.com/rosjava/rosjava_bootstrap/raw/kinetic/buildscript.gradle"apply from : "buildscript.gradle"dependencies {classpath 'com.android.tools.build:gradle:4.2.0'}
}2.问题还是找不到一些资源文件,还是要修改http代理问题
FAILURE: Build failed with an exception.
* What went wrong:
A problem occurred configuring root project 'RosAndroid'.
> Could not resolve all artifacts for configuration ':classpath'.
> Could not resolve org.ros.rosjava_bootstrap:gradle_plugins:[0.3,0.4).
Required by:
project :
> Failed to list versions for org.ros.rosjava_bootstrap:gradle_plugins.
> Unable to load Maven meta-data from http://repository.springsource.com/maven/bundles/release/org/ros/rosjava_bootstrap/gradle_plugins/maven-metadata.xml.
> Could not get resource 'http://repository.springsource.com/maven/bundles/release/org/ros/rosjava_bootstrap/gradle_plugins/maven-metadata.xml'.
> Could not GET 'http://repository.springsource.com/maven/bundles/release/org/ros/rosjava_bootstrap/gradle_plugins/maven-metadata.xml'.
上述1、2问题基本相似找不到外网的一些资源文件,下方两个csdn链接介绍了配置http proxy的方法,第一个是用国内的源(本人不适应),第二个适用于科学上网用户(vpn或者其他代理,本人一元机场适用,找了老半天ip和port,最后在配置选项中打开.yml文件找到ip和port)
Android Studio 配置 Http Proxy_android studio proxy_第89号的博客-CSDN博客
Android Studio Http Proxy设置_scimence的博客-CSDN博客
配置完后关闭android studio重新打开,会再次弹出http proxy设置框,再次填写一下信息,然后build,终于看到了success,撒花!编译花费时间挺长,初次编译好多东西需要下载,另外也和电脑配置有关。

好久没碰安卓了,很生疏(当初学的时候也是半吊子,书到用时方恨少,建议本科的计算机同学好好敲代码)下方教程一有快速上手教程,对该app的功能基本熟悉,然后就可以看代码,然后准备二次开发。
android app控制ros机器人一_小洁癖Jieie的博客-CSDN博客
前期可以使用Androidstudio的模拟器看效果,真机测试可以配合豌豆荚使用。
运行代码时有警告, 且提示Launching 'app' on No Devices.
Error while waiting for device: Timed out after 300seconds waiting for emulator to come online.
虚拟设备有问题,重新安装了一下,还是有警告,但是不影响使用

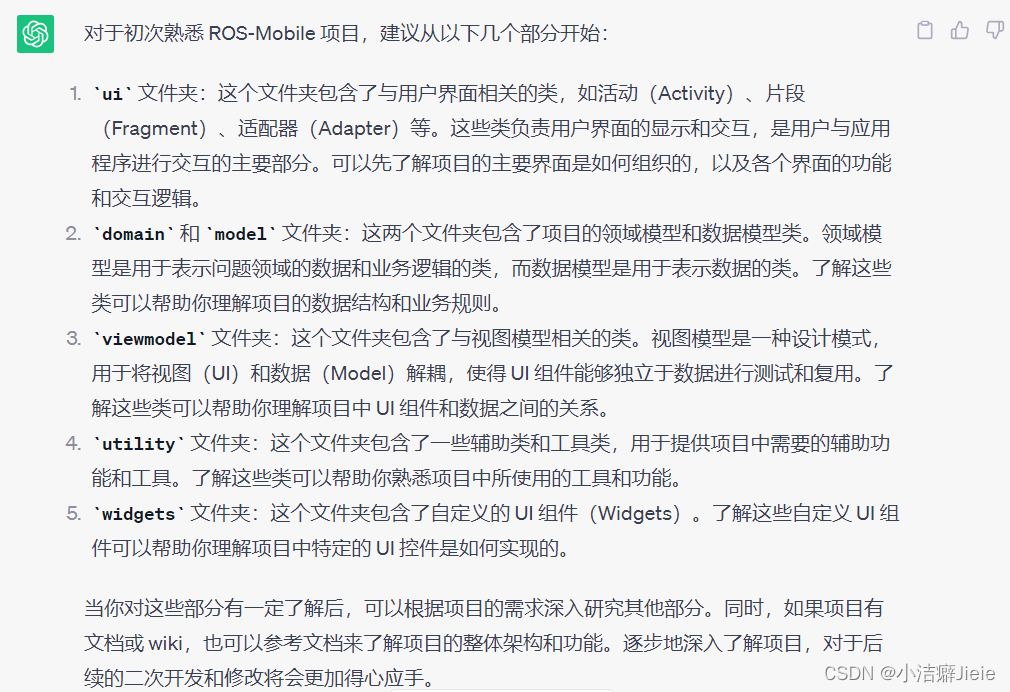
gpt的建议是按照上述顺序看代码






![R语言无法调用stats.dll的问题解决方案[补充]](https://img-blog.csdnimg.cn/img_convert/4f03963b6716440cf661480ad574ce37.png)