本文仅供学习使用
本文参考:
《机构运动微分几何学分析与综合》-王德伦、汪伟
《微分几何》吴大任
Ch02-3 平面机构离散运动鞍点综合
- 2.4 鞍滑点
- 2.4.1 鞍线与二副连架杆P-R
- 2.4.2 鞍线误差
- 2.4.3 三位置鞍线
- 2.4.4 四位置鞍线
- 2.4.5 多位置鞍线
- 2.4.6 滑点与鞍滑点
2.4 鞍滑点
在平面机构运动综合时,往往期望用二副杆P-R作为连架杆,而二副杆P-R对应的约束曲线为直线。寻求平面运动刚体上点,使其离散轨迹与直线的差异尽可能小,以便综合出连架杆P-R,是平面离散运动几何学研究的另一重要内容。在三到四个离散位置时,经典理论已经表明运动刚体上有滑点圆和滑点存在,而对于多位置运动刚体上点及其离散轨迹与直线比较,尚在讨论之中。本节以最大误差最小准则评价离散曲线逼近直线的性质,进而讨论运动刚体上点的离散轨迹与直线的差异,建立鞍点规划模型,寻求离散运动刚体上的鞍滑点。
2.4.1 鞍线与二副连架杆P-R
对于刚体运动平面上一点在固定坐标系{Of;i⃗f,j⃗f}\{{{O}_{f}};{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}{Of;if,jf}中的离散轨迹点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)}评价直线与{RP(i)}\{R_{P}^{(i)}\}{RP(i)}的接近程度,需用直线拟合,可依据直线的曲率为零的不变量性质,不涉及直线位置,采用类似2.3节鞍圆拟合的定义和定理,有∶
定义2.3 依据被拟合离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)}的性质并按最大法向拟合误差为最小原则得到唯一的拟合直线,称为鞍点意义下的自适应拟合直线,简称鞍线,对应的最大法向拟合误差称为鞍线误差。
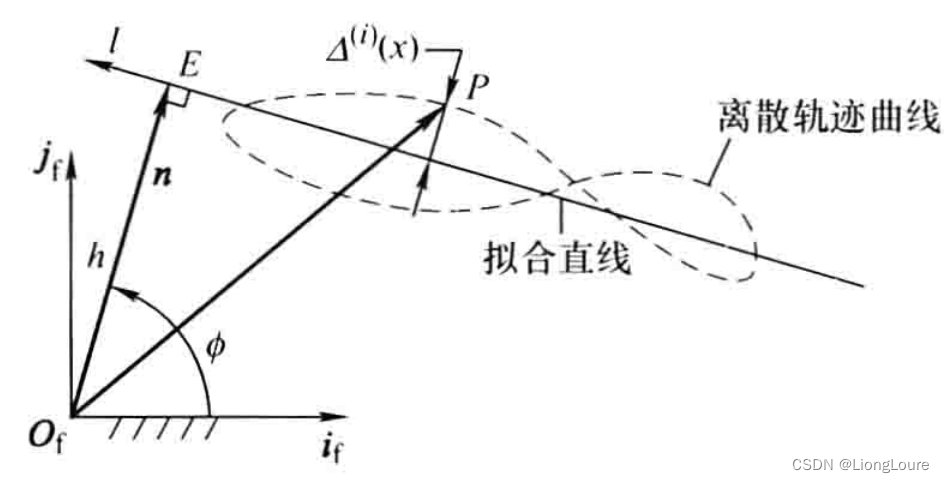
运动刚体Σ∗\Sigma *Σ∗上的点PPP在固定坐标系{Of;i⃗f,j⃗f}\{{{O}_{f}};{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}{Of;if,jf}中的离散轨迹点集 {RP(i)}\{R_{P}^{(i)}\}{RP(i)},将其矢量方程按最大拟合误差最小原则用直线进行自适应拟合,自固定坐标系坐标原点Of{{O}_{f}}Of作直线的垂线,取垂足EEE为参考点,其矢径为R⃗E=(hcosϕ,hsinϕ)T{\vec R_E} = {(h\cos \phi ,h\sin \phi )^T}RE=(hcosϕ,hsinϕ)T,其中hhh与ϕ\phiϕ分别为垂线的长度以及方向角,而直线的单位方向矢量为l⃗=(−sinϕ,cosϕ)T\vec l = {( - \sin \phi ,\cos \phi )^T}l=(−sinϕ,cosϕ)T,如上图所示。
建立鞍线拟合的误差模型为∶
{Δpr=minxmax1≤i≤n{Δ(i)(x)}=minxmax1≤i≤n{∣xP(i)cosϕ+yP(i)sinϕ−h∣}s.t.h∈[0,+∞),ϕ∈[0,2π)x=(h,ϕ)T\left\{ \begin{matrix} {{\Delta }_{pr}}=\underset{x}{\mathop{\min }}\,\underset{1\le i\le n}{\mathop{\max }}\,\{{{\Delta }^{(i)}}(x)\}=\underset{x}{\mathop{\min }}\,\underset{1\le i\le n}{\mathop{\max }}\,\{\left| x_{P}^{(i)}\cos \phi +y_{P}^{(i)}\sin \phi -h \right|\} \\ \begin{matrix} s.t. & h\in [0,+\infty ),\phi \in [0,2\pi ) \\ \end{matrix} \\ x={{(h,\phi )}^{T}} \\ \end{matrix} \right.⎩⎪⎨⎪⎧Δpr=xmin1≤i≤nmax{Δ(i)(x)}=xmin1≤i≤nmax{∣∣∣xP(i)cosϕ+yP(i)sinϕ−h∣∣∣}s.t.h∈[0,+∞),ϕ∈[0,2π)x=(h,ϕ)T
Δ(i)(x)=R⃗P(i)⋅R⃗E∣R⃗E∣−∣R⃗E∣{{\Delta }^{(i)}}(x)=\vec{R}_{P}^{(i)}\cdot \frac{{{{\vec{R}}}_{E}}}{\left| {{{\vec{R}}}_{E}} \right|}-\left| {{{\vec{R}}}_{E}} \right|Δ(i)(x)=RP(i)⋅∣RE∣RE−∣∣∣RE∣∣∣
式中,nnn为已知离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)}中离散点的个数,{Δ(i)(x)}={∣xP(i)cosϕ+yP(i)sinϕ−h∣}\{{{\Delta }^{(i)}}(x)\}=\{\left| x_{P}^{(i)}\cos \phi +y_{P}^{(i)}\sin \phi -h \right|\}{Δ(i)(x)}={∣∣∣xP(i)cosϕ+yP(i)sinϕ−h∣∣∣}为 {RP(i)}\{R_{P}^{(i)}\}{RP(i)}中的点与浮动拟合直线的误差集合,Δpr{{\Delta }_{pr}}Δpr为目标函数的输出值,即鞍线误差。优化变量x=(h,ϕ)Tx={{(h,\phi )}^{T}}x=(h,ϕ)T为刚体平面上任意直线的参数。该优化模型同样是一个离散函数鞍点规划问题,并直接应用MATLAB软件优化工具箱中的fminimax函数进行求解,其具体参数设置将在后续算例中进行介绍。同鞍圆一样,为简便得到初始值,采用最小二乘意义下直线拟合离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)},计算出初始值。对于给定的离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)},用直线R⃗L=R⃗E+λl⃗{{{\vec{R}}}_{L}}={{{\vec{R}}}_{E}}+\lambda \vec{l}RL=RE+λl去逼近时,今残差为:
ei=∣xP(i)cosϕ+yP(i)sinϕ−h∣{{e}_{i}}=\left| x_{P}^{(i)}\cos \phi +y_{P}^{(i)}\sin \phi -h \right|ei=∣∣∣xP(i)cosϕ+yP(i)sinϕ−h∣∣∣
则可得残差的平方和为∶
F=∑i=1nei2=∑i=1n(xP(i)cosϕ+yP(i)sinϕ−h)2F=\sum\limits_{i=1}^{n}{{{e}_{i}}^{2}}=\sum\limits_{i=1}^{n}{{{(x_{P}^{(i)}\cos \phi +y_{P}^{(i)}\sin \phi -h)}^{2}}}F=i=1∑nei2=i=1∑n(xP(i)cosϕ+yP(i)sinϕ−h)2
将上式分别对参数ϕ\phiϕ和hhh求导并令其为零,可得∶
{∂F∂ϕ=2∑i=1n(xP(i)cosϕ+yP(i)sinϕ−h)⋅(−xP(i)sinϕ+yP(i)cosϕ)=0∂F∂h=−2∑i=1n(xP(i)cosϕ+yP(i)sinϕ−h)=0\left\{ \begin{matrix} \frac{\partial F}{\partial \phi }=2\sum\limits_{i=1}^{n}{(x_{P}^{(i)}\cos \phi +y_{P}^{(i)}\sin \phi -h)}\cdot (-x_{P}^{(i)}\sin \phi +y_{P}^{(i)}\cos \phi )=0 \\ \frac{\partial F}{\partial h}=-2\sum\limits_{i=1}^{n}{(x_{P}^{(i)}\cos \phi +y_{P}^{(i)}\sin \phi -h)}=0 \\ \end{matrix} \right.⎩⎪⎨⎪⎧∂ϕ∂F=2i=1∑n(xP(i)cosϕ+yP(i)sinϕ−h)⋅(−xP(i)sinϕ+yP(i)cosϕ)=0∂h∂F=−2i=1∑n(xP(i)cosϕ+yP(i)sinϕ−h)=0
由上式可得到最小二乘意义下的直线的参数ϕ\phiϕ和hhh∶
{cotϕ=−n∑i=1nxP(i)yP(i)−∑i=1nxP(i)∑i=1nyP(i)n∑i=1n(xP(i))2−(∑i=1nxP(i))2h=sinϕ⋅n∑i=1n(xP(i))2∑i=1nyP(i)−∑i=1nxP(i)∑i=1nxP(i)yP(i)n∑i=1n(xP(i))2−(∑i=1nxP(i))2\left\{ \begin{matrix} \cot \phi =-\frac{n\sum\limits_{i=1}^{n}{x_{P}^{(i)}y_{P}^{(i)}}-\sum\limits_{i=1}^{n}{x_{P}^{(i)}}\sum\limits_{i=1}^{n}{y_{P}^{(i)}}}{n\sum\limits_{i=1}^{n}{{{(x_{P}^{(i)})}^{2}}}-{{(\sum\limits_{i=1}^{n}{x_{P}^{(i)}})}^{2}}} \\ h=\sin \phi \cdot \frac{n\sum\limits_{i=1}^{n}{{{(x_{P}^{(i)})}^{2}}}\sum\limits_{i=1}^{n}{y_{P}^{(i)}}-\sum\limits_{i=1}^{n}{x_{P}^{(i)}}\sum\limits_{i=1}^{n}{x_{P}^{(i)}y_{P}^{(i)}}}{n\sum\limits_{i=1}^{n}{{{(x_{P}^{(i)})}^{2}}}-{{(\sum\limits_{i=1}^{n}{x_{P}^{(i)}})}^{2}}} \\ \end{matrix} \right.⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧cotϕ=−ni=1∑n(xP(i))2−(i=1∑nxP(i))2ni=1∑nxP(i)yP(i)−i=1∑nxP(i)i=1∑nyP(i)h=sinϕ⋅ni=1∑n(xP(i))2−(i=1∑nxP(i))2ni=1∑n(xP(i))2i=1∑nyP(i)−i=1∑nxP(i)i=1∑nxP(i)yP(i)
对于给定离散运动(xOmf(i),yOmf(i),γ(i))(x_{Omf}^{(i)},y_{Omf}^{(i)},{{\gamma }^{(i)}})(xOmf(i),yOmf(i),γ(i))的刚体上任意点PPP,其在固定坐标系{Of;i⃗f,j⃗f}\{{{O}_{f}};{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}{Of;if,jf}中的离散轨迹可计算得出,根据鞍线的定义以及误差模型,直接采用MATLAB软件优化工具箱中的fminimax函数,采用类似鞍圆拟合的参数设置进行求解,同样可以将基于离散点集 {RP(i)}\{R_{P}^{(i)}\}{RP(i)}的鞍线拟合编制成子函数(AprF),该子函数的输入为离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)}中各点的坐标,输出为鞍线的直线参数(h,ϕ)(h,\phi )(h,ϕ)以及鞍线误差Δpr{{\Delta }_{pr}}Δpr,形成鞍线子程序AprF。
2.4.2 鞍线误差
为讨论平面曲线鞍线拟合的误差性质,假定运动平面上点在固定坐标系中的轨迹ΓP{{\Gamma }_{P}}ΓP,为连续曲线,在定义2.3中按最大法向拟合误差最小为原则确定了唯一的鞍线LLL,其拟合误差对于曲线ΓP{{\Gamma }_{P}}ΓP上所有点而言是最大误差(全局最大值),而对于所有拟合直线参数h∈(0,+∞),ϕ∈[0,2π)h\in (0,+\infty ),\phi \in [0,2\pi )h∈(0,+∞),ϕ∈[0,2π)而言,该最大误差值又是最小的。如上图所示,鞍线LLL的矢量方程为R⃗L=R⃗E+λl⃗{{{\vec{R}}}_{L}}={{{\vec{R}}}_{E}}+\lambda \vec{l}RL=RE+λl,那么,鞍线LLL的单位法矢n⃗{\vec{n}}n与其单位矢量l⃗{\vec{l}}l正交,曲线ΓP{{\Gamma }_{P}}ΓP与鞍线的法向距离为误差Δ\DeltaΔ,曲线ΓP{{\Gamma }_{P}}ΓP上PPP点的矢径R⃗P{{{\vec{R}}}_{P}}RP,可由鞍线的矢量方程以及法向误差Δ\DeltaΔ表示为∶
R⃗P=R⃗E+λl⃗+Δn⃗{{{\vec{R}}}_{P}}={{{\vec{R}}}_{E}}+\lambda \vec{l}+\Delta \vec{n}RP=RE+λl+Δn
由上式得到鞍线LLL与曲线ΓP{{\Gamma }_{P}}ΓP之间的法向误差为∶
Δ=(R⃗P−R⃗E)⋅n⃗\Delta =({{{\vec{R}}}_{P}}-{{{\vec{R}}}_{E}})\cdot \vec{n}Δ=(RP−RE)⋅n
对于鞍线LLL,参考点R⃗E{{{\vec{R}}}_{E}}RE和法向单位矢量n⃗{\vec{n}}n均为常矢量,将误差表达式对曲线ΓP{{\Gamma }_{P}}ΓP的弧长sss求导,有∶
dΔds=dR⃗Pds⋅n⃗\frac{d\Delta }{ds}=\frac{d{{{\vec{R}}}_{P}}}{ds}\cdot \vec{n}dsdΔ=dsdRP⋅n
在曲线ΓP{{\Gamma }_{P}}ΓP上PPP点处误差Δ\DeltaΔ取得极值的条件为dΔds=0\frac{d\Delta }{ds}=0dsdΔ=0,由上式可得∶
dR⃗Pds⋅n⃗=0\frac{d{{{\vec{R}}}_{P}}}{ds}\cdot \vec{n}=0dsdRP⋅n=0
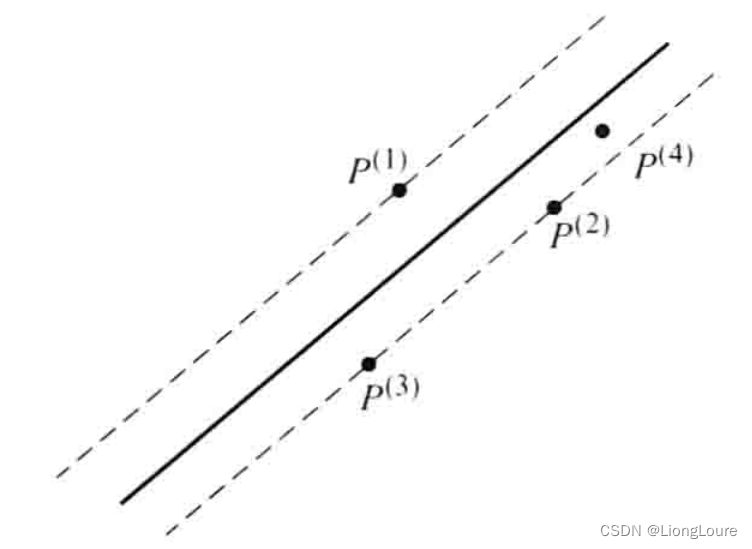
上式说明曲线ΓP{{\Gamma }_{P}}ΓP上PPP点的切线dR⃗Pds\frac{d{{{\vec{R}}}_{P}}}{ds}dsdRP与鞍线的法线n⃗{\vec{n}}n正交,此时曲线ΓP{{\Gamma }_{P}}ΓP上PPP点法线与鞍线的法线重合。而曲线ΓP{{\Gamma }_{P}}ΓP上可能存在有多点处的法线与鞍线垂直,这些点的误差取得极值,但不一定是最大值,如下图所示的点P(k+1),P(k+2){{P}^{(k+1)}},{{P}^{(k+2)}}P(k+1),P(k+2)和P(k+3){{P}^{(k+3)}}P(k+3)
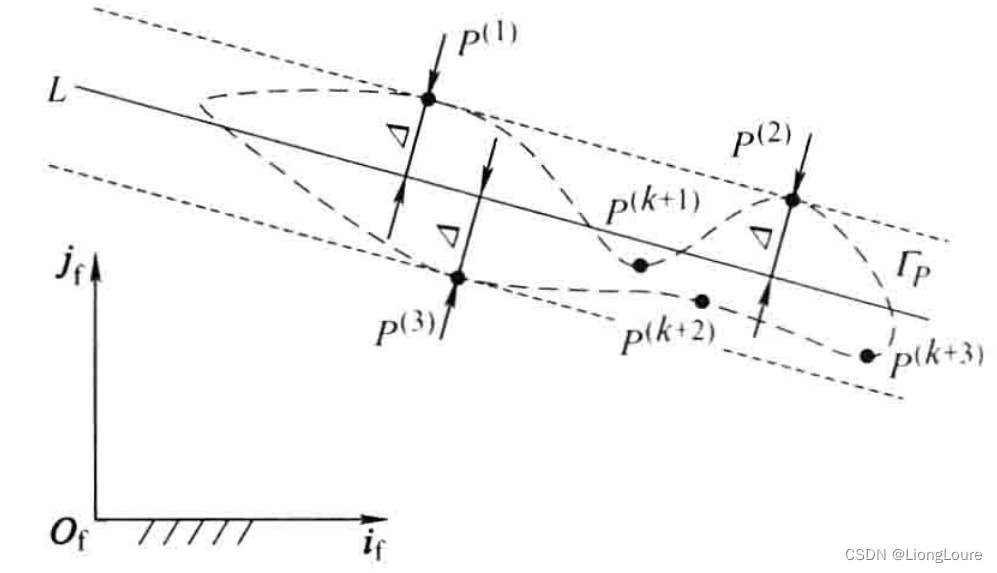
对于给定曲线ΓP{{\Gamma }_{P}}ΓP其上各点的(R⃗P,dR⃗Pds×k⃗)({{{\vec{R}}}_{P}},\frac{d{{{\vec{R}}}_{P}}}{ds}\times \vec{k})(RP,dsdRP×k)已知,若确定其鞍线,至少需要有三个点使得上式成立。由法向误差求得其相应的法向误差并判断是否为最大值,从而解出鞍线的两个参数(h,ϕ)(h,\phi )(h,ϕ)和误差Δ\DeltaΔ,多于三点则为冗余情况。采用两条平行直线包容被拟合曲线,上图所示两条虚线直线,依据鞍点规划模型,两平行直线与被包容曲线的三个切点即为最大误差点。鞍点规划理论已经证明至少有三个点的误差取得相等且为最大值,并分布在鞍线LLL的两侧。
由此可见,以鞍点规划(最大误差最小)模型评价一条曲线与直线的近似程度由该曲线上三个特征点体现,称为鞍线拟合特征点,分布在直线两侧,并且具有相同误差值,也就是由这三个鞍线拟合特征点确定了鞍线的方向和位置。当鞍线误差趋于零时,被拟合曲线趋近于直线。其他点的误差未计入评价,但可能会影响鞍线拟合极值的选取。
当被拟合曲线为运动刚体上点的离散轨迹点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)}时,连续曲线上的鞍线拟合特征点由离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)}中产生。由于曲线不再连续,曲线上任意点与鞍线的误差Δ(i){{\Delta }^{(i)}}Δ(i)表达式改写为∶
Δ(i)=(R⃗P(i)−R⃗E)⋅n⃗,R⃗P(i)=[M(i)]⋅R⃗Pm{{\Delta }^{(i)}}=(\vec{R}_{P}^{(i)}-{{{\vec{R}}}_{E}})\cdot \vec{n},\vec{R}_{P}^{(i)}=[{{M}^{(i)}}]\cdot {{{\vec{R}}}_{Pm}}Δ(i)=(RP(i)−RE)⋅n,RP(i)=[M(i)]⋅RPm
而鞍线误差为其中的最大值,其计算公式为∶
Δpr=max{∣Δ(i)∣}=max{∣xP(i)cosϕ+yP(i)sinϕ−h∣}{{\Delta }_{pr}}=\max \{\left| {{\Delta }^{(i)}} \right|\}=\max \{\left| x_{P}^{(i)}\cos \phi +y_{P}^{(i)}\sin \phi -h \right|\}Δpr=max{∣∣∣Δ(i)∣∣∣}=max{∣∣∣xP(i)cosϕ+yP(i)sinϕ−h∣∣∣}
换言之,极值点条件由上式通过数值计算和比较来确定。由此可知,离散运动刚体上一点PPP在固定平面坐标系中产生一离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)},在{RP(i)}\{R_{P}^{(i)}\}{RP(i)}中由三个鞍线拟合特征点确定出唯一鞍线,这三个鞍线拟合特征点所对应的运动刚体位置,称为鞍线拟合特征位置。显然,鞍点规划模型建立了离散运动、刚体上点及其离散轨迹(鞍线拟合特征点)、鞍线(位置)和鞍线误差相互对应关系,为讨论离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)}与直线比较的整体几何性质提供了依据。
2.4.3 三位置鞍线
当运动刚体在固定坐标系中仅有三个离散位置时,编号为1、2、3,运动刚体上任意点PPP在固定坐标系中仅产生含有三个离散点P(1){{P}^{(1)}}P(1),P(2){{P}^{(2)}}P(2)和P(3){{P}^{(3)}}P(3)的离散点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)},i=1,2,3i=1,2,3i=1,2,3。依据鞍线拟合模型,调用鞍线子程序AprF,得到各自对应的鞍线,称为三位置鞍线。三个离散点都是鞍线拟合特征点,分布在鞍线两侧,其误差Δ\DeltaΔ为相同的最大值,三个位置自然也是鞍线拟合位置。
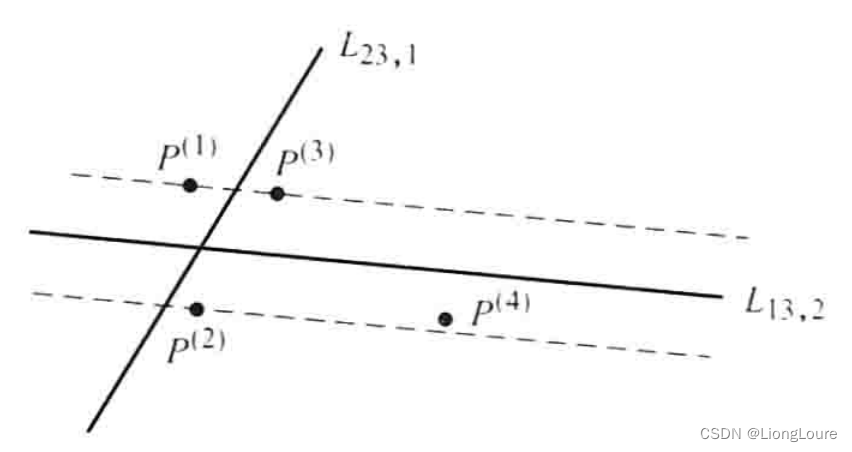
对于三位置离散轨迹{RP(i)}\{R_{P}^{(i)}\}{RP(i)},i=1,2,3i=1,2,3i=1,2,3,依据鞍点规划理论,三位置鞍线误差为最大拟合误差(极大值)最小,而且拟合特征点P(1){{P}^{(1)}}P(1),P(2){{P}^{(2)}}P(2)和P(3){{P}^{(3)}}P(3)分布在鞍线的两侧。令三个拟合特征点处的误差相等(实现两侧分布),使得最大拟合误差取得极小值(不一定是最小值)。如下图所示,直线L12,3{{L}_{12,3}}L12,3,L23,1{{L}_{23,1}}L23,1和L13,2{{L}_{13,2}}L13,2,称为三位置分布线,依据鞍点规划模型(最大误差最小),取三个三位置分布线误差最小者为三位置鞍线,即L23,1{{L}_{23,1}}L23,1。为便于后文的离散运动几何学分析,在此推导三位置分布线误差的代数方程。
对于三位置分布线L12,3{{L}_{12,3}}L12,3,其下标为位置编号,表明特征点P(1){{P}^{(1)}}P(1)和P(2){{P}^{(2)}}P(2)位于分布线L12,3{{L}_{12,3}}L12,3一侧,而点P(3){{P}^{(3)}}P(3)位于分布线L12,3{{L}_{12,3}}L12,3另一侧,则过点P(1){{P}^{(1)}}P(1)和P(2){{P}^{(2)}}P(2)的直线方程为∶
(xP(2)−xP(1))y−(yP(2)−yP(1))x+yP(2)xP(1)−xP(2)yP(1)=0(x_{P}^{(2)}-x_{P}^{(1)})y-(y_{P}^{(2)}-y_{P}^{(1)})x+y_{P}^{(2)}x_{P}^{(1)}-x_{P}^{(2)}y_{P}^{(1)}=0(xP(2)−xP(1))y−(yP(2)−yP(1))x+yP(2)xP(1)−xP(2)yP(1)=0
P(3){{P}^{(3)}}P(3)到直线P(1)P(2)‾\overline{{{P}^{(1)}}{{P}^{(2)}}}P(1)P(2)的距离为:
d=∣(xP(2)−xP(1))yP(3)−(yP(2)−yP(1))xP(3)+yP(2)xP(1)−xP(2)yP(1)∣(xP(2)−xP(1))2+(yP(2)−yP(1))2d=\frac{\left| (x_{P}^{(2)}-x_{P}^{(1)})y_{P}^{(3)}-(y_{P}^{(2)}-y_{P}^{(1)})x_{P}^{(3)}+y_{P}^{(2)}x_{P}^{(1)}-x_{P}^{(2)}y_{P}^{(1)} \right|}{\sqrt{{{(x_{P}^{(2)}-x_{P}^{(1)})}^{2}}+{{(y_{P}^{(2)}-y_{P}^{(1)})}^{2}}}}d=(xP(2)−xP(1))2+(yP(2)−yP(1))2∣∣∣(xP(2)−xP(1))yP(3)−(yP(2)−yP(1))xP(3)+yP(2)xP(1)−xP(2)yP(1)∣∣∣
三个点P(1){{P}^{(1)}}P(1),P(2){{P}^{(2)}}P(2)和P(3){{P}^{(3)}}P(3)到分布线L12,3{{L}_{12,3}}L12,3的距离相等,从而分布线拟合误差Δ12,3{{\Delta }_{12,3}}Δ12,3 为∶
Δ12,3=∣(xP(2)−xP(1))yP(3)−(yP(2)−yP(1))xP(3)+yP(2)xP(1)−xP(2)yP(1)∣2(xP(2)−xP(1))2+(yP(2)−yP(1))2{{\Delta }_{12,3}}=\frac{\left| (x_{P}^{(2)}-x_{P}^{(1)})y_{P}^{(3)}-(y_{P}^{(2)}-y_{P}^{(1)})x_{P}^{(3)}+y_{P}^{(2)}x_{P}^{(1)}-x_{P}^{(2)}y_{P}^{(1)} \right|}{2\sqrt{{{(x_{P}^{(2)}-x_{P}^{(1)})}^{2}}+{{(y_{P}^{(2)}-y_{P}^{(1)})}^{2}}}}Δ12,3=2(xP(2)−xP(1))2+(yP(2)−yP(1))2∣∣∣(xP(2)−xP(1))yP(3)−(yP(2)−yP(1))xP(3)+yP(2)xP(1)−xP(2)yP(1)∣∣∣
对于运动刚体上点PPP的坐标xPm,yPm{{x}_{Pm}},{{y}_{Pm}}xPm,yPm,可得到固定坐标系中点P(1){{P}^{(1)}}P(1),P(2){{P}^{(2)}}P(2)和P(3){{P}^{(3)}}P(3)的坐标,将其代入上式,可得关于xPm,yPm,Δ12,3{{x}_{Pm}},{{y}_{Pm}},{{\Delta }_{12,3}}xPm,yPm,Δ12,3的四次代数方程∶
4(a1xPm2+a1yPm2+a2xPm+a3yPm+a4)Δ12,32−(a5xPm2+a5yPm2+a6xPm+a7yPm+a8)=04({{a}_{1}}{{x}_{Pm}}^{2}+{{a}_{1}}{{y}_{Pm}}^{2}+{{a}_{2}}{{x}_{Pm}}+{{a}_{3}}{{y}_{Pm}}+{{a}_{4}}){{\Delta }_{12,3}}^{2}-({{a}_{5}}{{x}_{Pm}}^{2}+{{a}_{5}}{{y}_{Pm}}^{2}+{{a}_{6}}{{x}_{Pm}}+{{a}_{7}}{{y}_{Pm}}+{{a}_{8}})=04(a1xPm2+a1yPm2+a2xPm+a3yPm+a4)Δ12,32−(a5xPm2+a5yPm2+a6xPm+a7yPm+a8)=0
式中,ai,i=1,2,...,8{{a}_{i}},i=1,2,...,8ai,i=1,2,...,8为系数,可由离散位置参数(xOmf(i),yOmf(i),γ(i)),i=1,2,3(x_{Omf}^{(i)},y_{Omf}^{(i)},{{\gamma }^{(i)}}),i=1,2,3(xOmf(i),yOmf(i),γ(i)),i=1,2,3得到。同理,可得分布线L23,1{{L}_{23,1}}L23,1,及其误差Δ23,1{{\Delta }_{23,1}}Δ23,1和分布线L13,2{{L}_{13,2}}L13,2及其误差Δ13,2{{\Delta }_{13,2}}Δ13,2。三个离散点P(1){{P}^{(1)}}P(1),P(2){{P}^{(2)}}P(2)和P(3){{P}^{(3)}}P(3)的鞍线误差Δ123{{\Delta }_{123}}Δ123为三个分布线误差Δ12,3{{\Delta }_{12,3}}Δ12,3,Δ23,1{{\Delta }_{23,1}}Δ23,1,Δ13,2{{\Delta }_{13,2}}Δ13,2中的最小值,即:
Δ123=min(Δ12,3,Δ13,2,Δ23,1){{\Delta }_{123}}=\min ({{\Delta }_{12,3}},{{\Delta }_{13,2}},{{\Delta }_{23,1}})Δ123=min(Δ12,3,Δ13,2,Δ23,1)
鞍线误差Δ123{{\Delta }_{123}}Δ123 也可直接表示为:
Δ123=∣∣∣Δ23,1+Δ13,2∣2−∣Δ23,1−Δ13,2∣2∣+Δ12,3∣2−∣∣∣Δ23,1+Δ13,2∣2−∣Δ23,1−Δ13,2∣2∣−Δ12,3∣2{{\Delta }_{123}}=\frac{\left| \left| \frac{\left| {{\Delta }_{23,1}}+{{\Delta }_{13,2}} \right|}{2}-\frac{\left| {{\Delta }_{23,1}}-{{\Delta }_{13,2}} \right|}{2} \right|+{{\Delta }_{12,3}} \right|}{2}-\frac{\left| \left| \frac{\left| {{\Delta }_{23,1}}+{{\Delta }_{13,2}} \right|}{2}-\frac{\left| {{\Delta }_{23,1}}-{{\Delta }_{13,2}} \right|}{2} \right|-{{\Delta }_{12,3}} \right|}{2}Δ123=2∣∣∣∣∣∣2∣Δ23,1+Δ13,2∣−2∣Δ23,1−Δ13,2∣∣∣∣+Δ12,3∣∣∣−2∣∣∣∣∣∣2∣Δ23,1+Δ13,2∣−2∣Δ23,1−Δ13,2∣∣∣∣−Δ12,3∣∣∣
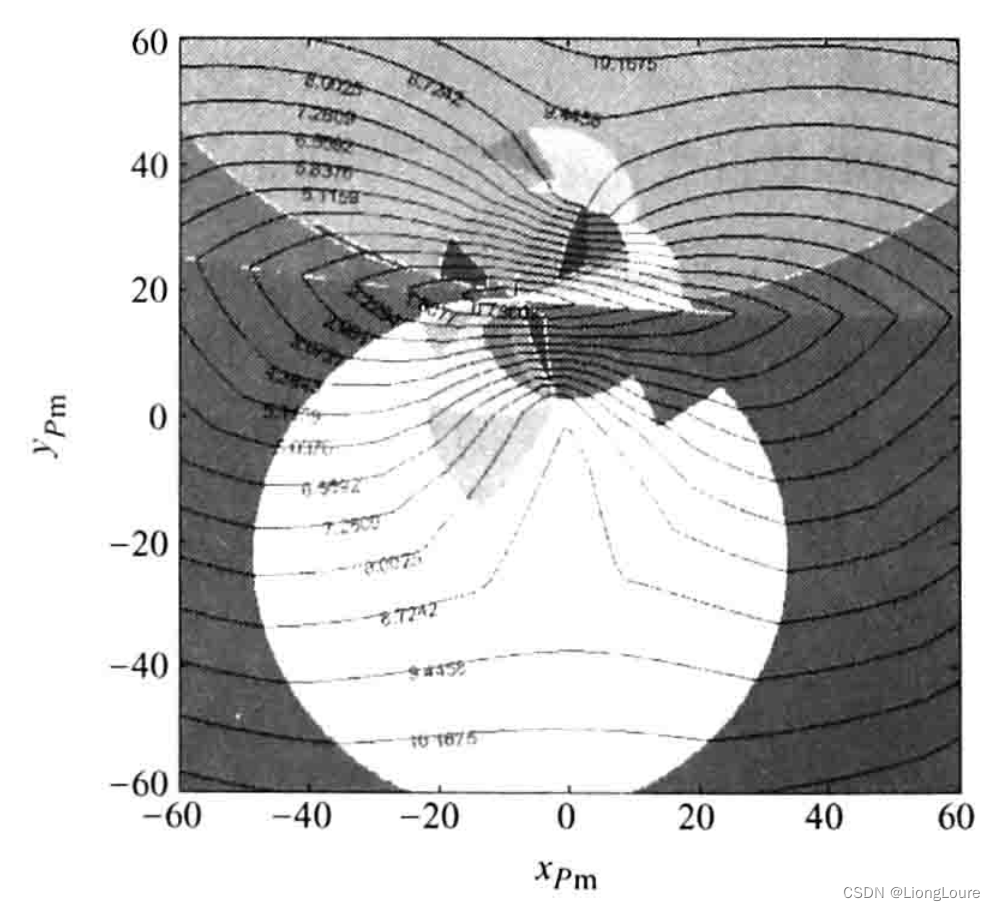
那么,运动刚体上任意点P的离散轨迹点集{RP(i)}\{R_{P}^{(i)}\}{RP(i)},i=1,2,3i=1,2,3i=1,2,3对应鞍线L123{{L}_{123}}L123及鞍线误差Δ123{{\Delta }_{123}}Δ123。对于给定三位置的运动刚体上所有点,都有对应各自的鞍线及其误差,可构造出三位置运动刚体上点-鞍线误差曲面,具有相同鞍线误差值的点采用曲线连接成为等高线,如下图所示。该图的离散运动刚体三个位置数据来源于表2.1中的前三组位置参数。
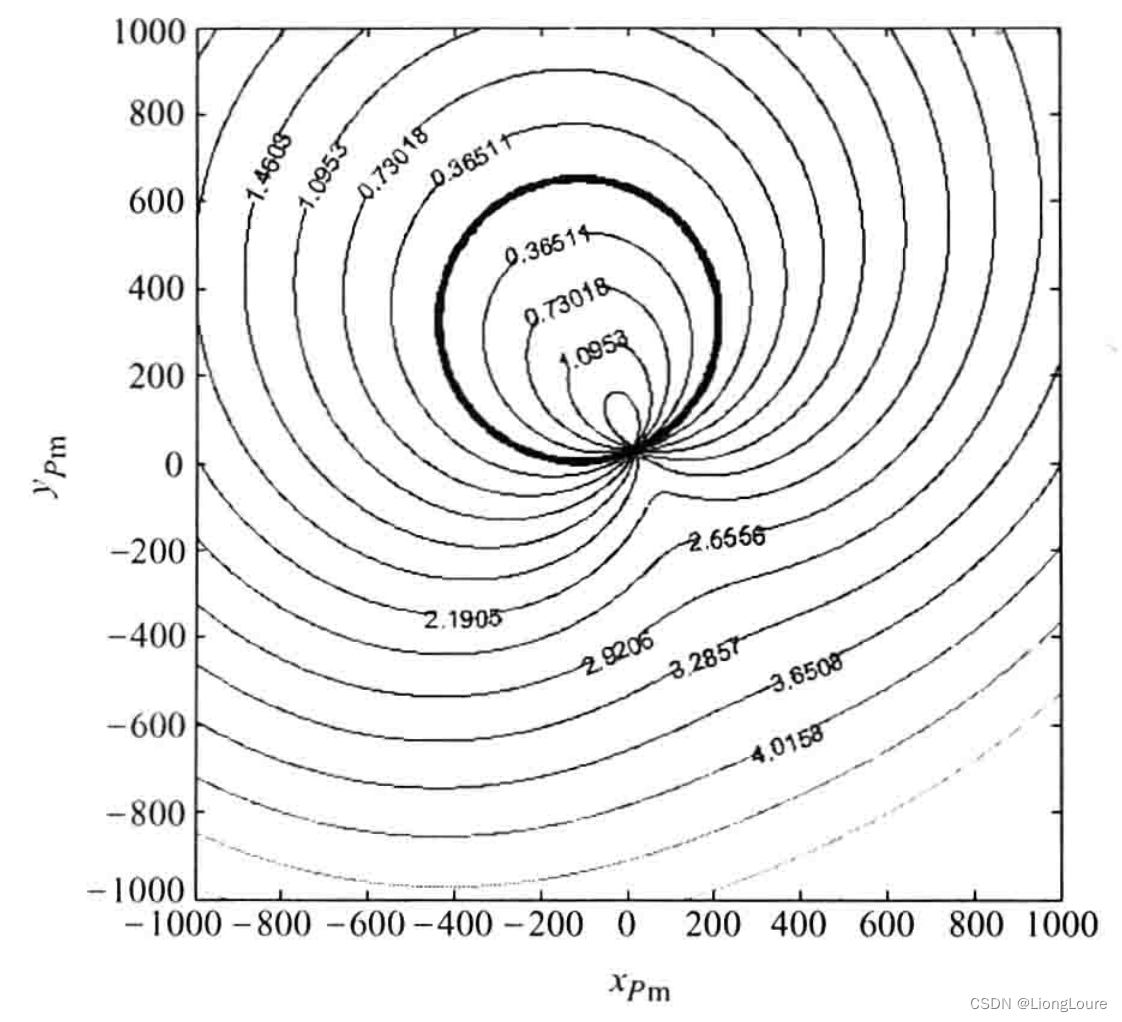
当运动刚体上点对应的鞍线误差值为零时,这些点便为滑点,由给定三位置运动刚体上的滑点构成的滑点曲线恰为圆,如上图中的粗实线所示。
2.4.4 四位置鞍线
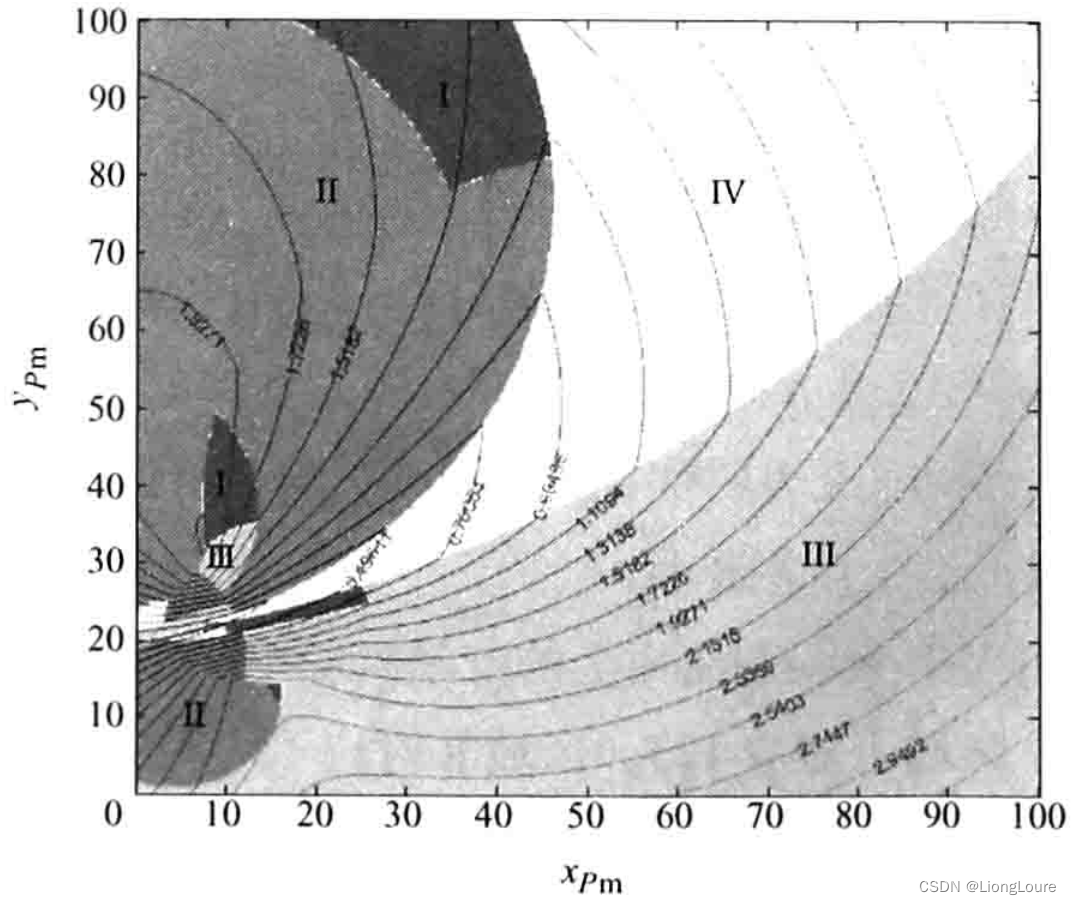
给定刚体四个离散位置,序号1、2、3、4,见表2.1中的前四个位置。运动刚体上任意点PPP在固定坐标系中产生对应的四个离散点分别为P(1){{P}^{(1)}}P(1)、P(2){{P}^{(2)}}P(2)、P(3){{P}^{(3)}}P(3)和P(4){{P}^{(4)}}P(4),依据鞍线拟合模型,调用鞍线子程序AprF,得到各自对应的鞍线,称为四位置鞍线,其误差为Δ1234{{\Delta }_{1234}}Δ1234。作出四位置鞍线误差曲面与等高线,如下图所示。
如前所述,运动刚体上任意点在固定坐标系中的离散点集对应的四位置鞍线也只有三个拟合特征点。即四位置鞍线由对应的三个拟合特征点确定,属于该三个拟合特征点对应的三个分布线之一,或者说给定运动刚体四位置,好比在上述三位置基础上增加第四个位置。现在讨论新增加的第四个位置与前三个位置在确定鞍线时的关系。
- 1)第四点P(4){{P}^{(4)}}P(4)不是离散轨迹的鞍线拟合特征点,对应位置不是拟合特征位置。
即点P(4){{P}^{(4)}}P(4)位于前三个点P(1){{P}^{(1)}}P(1)、P(2){{P}^{(2)}}P(2)、P(3){{P}^{(3)}}P(3)所确定的两平行直线包容区间内,如下图所示。
点P(4){{P}^{(4)}}P(4)对应的误差必小于前三个位置离散点P(1){{P}^{(1)}}P(1)、P(2){{P}^{(2)}}P(2)、P(3){{P}^{(3)}}P(3)的三位置鞍线误差Δ123{{\Delta }_{123}}Δ123,此时Δ1234{{\Delta }_{1234}}Δ1234=Δ123{{\Delta }_{123}}Δ123。那么,对于运动刚体上具有同样性质(Δ1234{{\Delta }_{1234}}Δ1234=Δ123{{\Delta }_{123}}Δ123)的点,分布在运动刚体上某些区域,如上图中所示的区域I,即为123位置点区域。
此区域中还有另一种情况,四位置鞍线由P(1){{P}^{(1)}}P(1)、P(2){{P}^{(2)}}P(2)、P(3){{P}^{(3)}}P(3)所确定,但并不是该三位置的鞍线,如下图所示。该三位置鞍线为分布线L23,1{{L}_{23,1}}L23,1,是三个分布线中误差最小的,Δ1234{{\Delta }_{1234}}Δ1234=Δ123{{\Delta }_{123}}Δ123;而四位置鞍线为分布线L13,2{{L}_{13,2}}L13,2,属于另一分布线,对应分布情况P(1)P(3)−P(2){{P}^{(1)}}{{P}^{(3)}}-{{P}^{(2)}}P(1)P(3)−P(2)。即此时该四位置鞍线Δ1234{{\Delta }_{1234}}Δ1234为三个分布线中的一个Δ13,2{{\Delta }_{13,2}}Δ13,2,不一定是三位置分布线误差最小的。
- 2)第四点P(4){{P}^{(4)}}P(4)是离散轨迹的鞍线拟合特征点,对应位置是拟合特征位置。
由第四个位置和前三个位置中的两个构成三个拟合特征位置,共有三种可能组合情况∶124124124、134134134和234234234。对于三位置运动刚体上所有点,和前面三位置123123123一样,可得到对应鞍线及鞍线误差,并可构造三位置运动刚体上点-鞍线误差的四次代数曲面。在四位置运动刚体上一点PPP处,轨迹上四点的鞍线误差必为最小误差,对应拟合特征位置组合三种情况,每种情况下有三个分布线,如三位置124124124,存在三个分布线误差Δ12,4{{\Delta }_{12,4}}Δ12,4、Δ14,2{{\Delta }_{14,2}}Δ14,2和Δ24,1{{\Delta }_{24,1}}Δ24,1。所以,三种位置组合共有9条分布线,哪种情况才有可能成为四位置鞍线误差,需要从四个离散轨迹点P(1)∼P(4){{P}^{(1)}}\sim{{P}^{(4)}}P(1)∼P(4)全局来看,其鞍线误差应满足最大误差最小。
如四位置鞍线误差曲面与等高线图中所示四位置鞍线误差曲面上的若干区域中,每个区域对应着鞍线拟合特征位置的不同组合,例如,区域I对应123123123,区域II对应124124124,区域Ⅲ对应134134134,区域Ⅳ对应234234234。在这四个区域中,每个区域内刚体上点对应不同三位置组合。由于离散运动刚体上的点是连续的,从区域I(123)变化到区域Ⅱ(124)时,边界上点同样应该具有两个区域的特性,其离散轨迹点(四个点)都是拟合特征点(鞍线误差),以便形成与相邻区域对应的鞍线及其误差以适应相邻区域过渡。 例如,两区域界限点,对应误差相等的两条鞍线(鞍线定义只有一条),或鞍线有两个解,即两条误差相同的分布线。将相邻区域的鞍线误差曲面方程联立,如Δ123{{\Delta }_{123}}Δ123=Δ124{{\Delta }_{124}}Δ124,由分布线拟合误差和鞍线误差可解得边界方程。一般情况下,边界曲线为六次代数曲线。三个或四个区域边界曲线的交点,则有三个或四个鞍线,并且误差都相等,表明此点对应多条鞍线(误差相同、方位不同)。特殊地,边界点对应的多个鞍线重合(同一条分布线)时,边界曲线退化为圆曲线,鞍线误差曲面二阶连续(相切地过渡),否则相交。
如前所述,四位置的鞍线误差曲面由四个三位置分布线误差曲面的分片组合,而每片都属于四次代数曲面,存在多个峰谷。从整体上比较四位置与三位置的鞍线误差曲面,三位置存在一条误差为零的等高线——滑点曲线,为一圆,相当于河谷;而四位置的等高线则没有,仅有一个鞍线误差为零的谷底点,即滑点(四点共线,误差为零),相当于把河流变成河床,露出一潭水的河谷。
2.4.5 多位置鞍线
由上述讨论可知,四位置运动刚体上点在固定坐标系中的离散轨迹对应鞍线及其误差是由相关三位置确定的,并由三位置鞍线误差曲面分片组合而成四位置鞍线误差曲面。对于多个离散位置,如十个位置,都可以被分解为相关三位置的组合。因此,给定再多位置的运动刚体,其离散点轨迹的鞍线及其误差性质都与四位置的类似,仅仅对应的三位置组合更多,按组合有Cn3C_{n}^{3}Cn3个,在运动刚体上对应的三位置点区域也只是更多些而已,无需再述。下图所示为表2.1中给定十个离散位置运动刚体上鞍线误差曲面等高线图,以不同灰度颜色表示不同三位置区域。
对于运动刚体的多个离散位置,其上任意点对应鞍线及其误差,以最大误差相同条件联系三个拟合位置,每个位置都对应着运动平面上的三位置点区域,位置数越多,三位置点区域越小,鞍线误差趋于极限,即轨迹曲线整体接近直线的程度——鞍线误差下界。当运动刚体的位置数目趋于无穷——无限接近位置时,运动刚体上点的轨迹趋于连续曲线。如2.2节所述,曲线与直线的接近程度仍然由三个拟合特征点确定,对应运动刚体三个拟合位置。运动刚体上的点连续变化,其轨迹曲线均对应三个拟合特征点。
2.4.6 滑点与鞍滑点
通过上述三、四位置和多位置离散轨迹的鞍线拟合和误差分析可知,多位置运动刚体上点对应的鞍线误差曲面为四次代数曲面的分片组合,即运动刚体上各个点的鞍线误差大小不同,是点的坐标的非线性函数。类比鞍圆点的定义,有∶
定义2.4 对于给定的平面运动,当运动平面上一点在其邻域内相对其他点而言,该点在固定坐标系中的轨迹对应的鞍线误差取得极小值,称该点为运动平面上的二次鞍点意义下的滑点,简称鞍滑点,相应的鞍线误差称为鞍滑点误差。
特殊地,若鞍线误差为零,则鞍滑点为滑点。由于运动刚体上点的连续性,对应离散轨迹的几何形状与尺度的连续变化,其对应鞍线误差曲面是四次代数曲面的分片组合,是运动刚体上点坐标(xPm,yPm)({{x}_{Pm}},{{y}_{Pm}})(xPm,yPm)(或者(rPm,θPm)({{r}_{Pm}},{{\theta }_{Pm}})(rPm,θPm))的非线性函数,因而存在极值,所以有∶
定理2.2 非退化的平面运动刚体上一定存在鞍滑点(近似滑点)。
鞍滑点(近似滑点)具有和鞍圆点(近似圆点)相类似的性质,同样属于二次极小意义,区别在于其轨迹对应于鞍线,鞍滑点的优化模型为∶
{δpr=minΔpr(z)z=(xPm,yPm)T\left\{ \begin{matrix} {{\delta }_{pr}}=\min {{\Delta }_{pr}}(z) \\ z={{({{x}_{Pm}},{{y}_{Pm}})}^{T}} \\ \end{matrix} \right.{δpr=minΔpr(z)z=(xPm,yPm)T
该优化模型的目标函数是以运动刚体上点坐标z=(xPm,yPm)Tz={{({{x}_{Pm}},{{y}_{Pm}})}^{T}}z=(xPm,yPm)T为优化变量的鞍线误差Δpr(z){{\Delta }_{pr}}(z)Δpr(z),鞍线误差可调用优化模型得到。该优化模型是一个无约束优化问题,在本书算例中则直接采用MATLAB软件优化工具箱中的fmincon函数进行求解。由于刚体运动的性质确定了其上各点的运动轨迹,而且各点的轨迹大小和形状各异,与直线的接近程度随运动刚体上点的位置不同而变化,鞍滑点优化模型的目标函数属于非线性函数。因此,鞍滑点优化模型需要在不同的凸区域布置初始点。简单的办法是在搜索区域内生成较多初始值,如随机数十倍初始点,分别从每个初始点出发进行优化搜索,可收敛到运动刚体上的鞍滑点。
依据鞍滑点的优化模型,对刚体平面上一定范围内进行鞍滑点的优化搜索。本书中直接采用MATLAB软件优化工具箱中的fmincon函数进行求解,fmincon函数的设置参考鞍圆点设置,可以形成运动刚体上无约束条件下鞍滑点优化搜索的标准程序模块,其 输入为已知刚体的离散位置参数,输出为刚体上鞍滑点参数及其鞍线误差,形成鞍滑点子程序AprP。
由此可见,对于讨论平面运动刚体上点与离散运动及其轨迹几何性质(与直线比较)的离散运动几何学问题,定义2.3给出了离散轨迹与直线的差异比较统一度量标准,即最大法向误差,准确反映了各点轨迹与直线的近似程度,具有可比性;定义2.4界定了其轨迹具有特殊几何特征的运动刚体上的点;定理2.2阐明了问题解的存在性,从而为鞍点规划有效迭代算法的收敛性提供了理论依据。
一般情况下,运动平面上各点的轨迹形状是连续变化的,所对应的鞍线误差曲面为四次代数曲面分片组合,从而为点位置坐标的非线性函数,因而在运动平面上存在一个或多个鞍滑点,这些鞍滑点所对应的鞍线误差也不相同(局部最优),可以从中选出误差较小的点。如果要求综合曲柄滑块四杆机构,需要在运动平面上所有点中寻求一个鞍圆点和一个鞍滑点。当然,运动平面上鞍圆点与鞍滑点所对应的误差大小依赖于平面运动的性质,如曲柄滑块机构无法实现的给定平面运动,鞍圆点和鞍滑点是运动平面上局部最接近圆和直线的,或者说局部意义上最近似复演给定运动,但总可以找到。同样,作者期望利用运动刚体点对应鞍线误差曲面的代数性质,从理论上研究全局范围内鞍滑点的存在性和个数,为优化综合提供理论依据。
将三、四到多个离散位置对应的滑点圆、滑点到鞍滑点联系起来,分别对应鞍线误差曲面及其等高线,形成多峰谷的误差曲面,而从滑点或鞍滑点对应误差曲面上的谷底点,可以窥见出刚体有限分离位置运动几何学的某些规律,如鞍线误差曲面随刚体位置(数)的关系,相应的滑点圆、滑点到鞍滑点的演变规律等,也许是揭示刚体运动几何学的新视角。
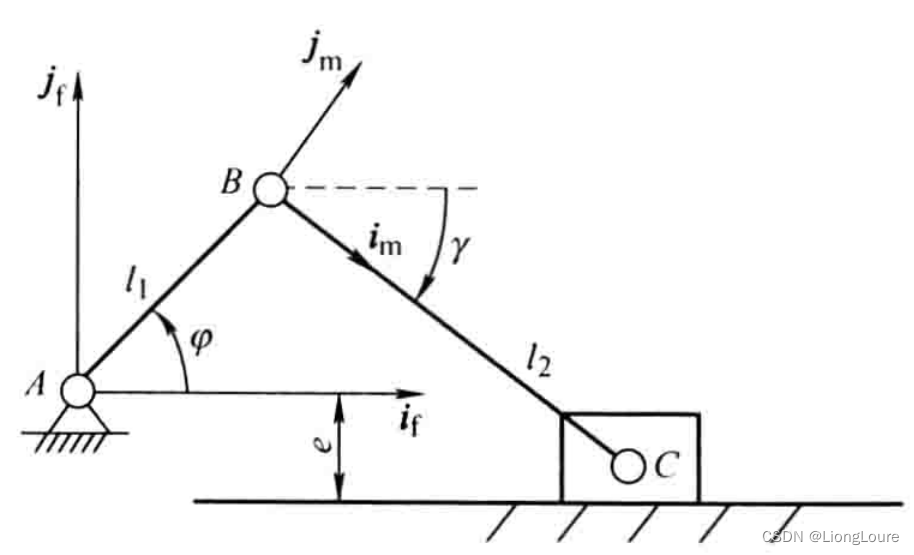
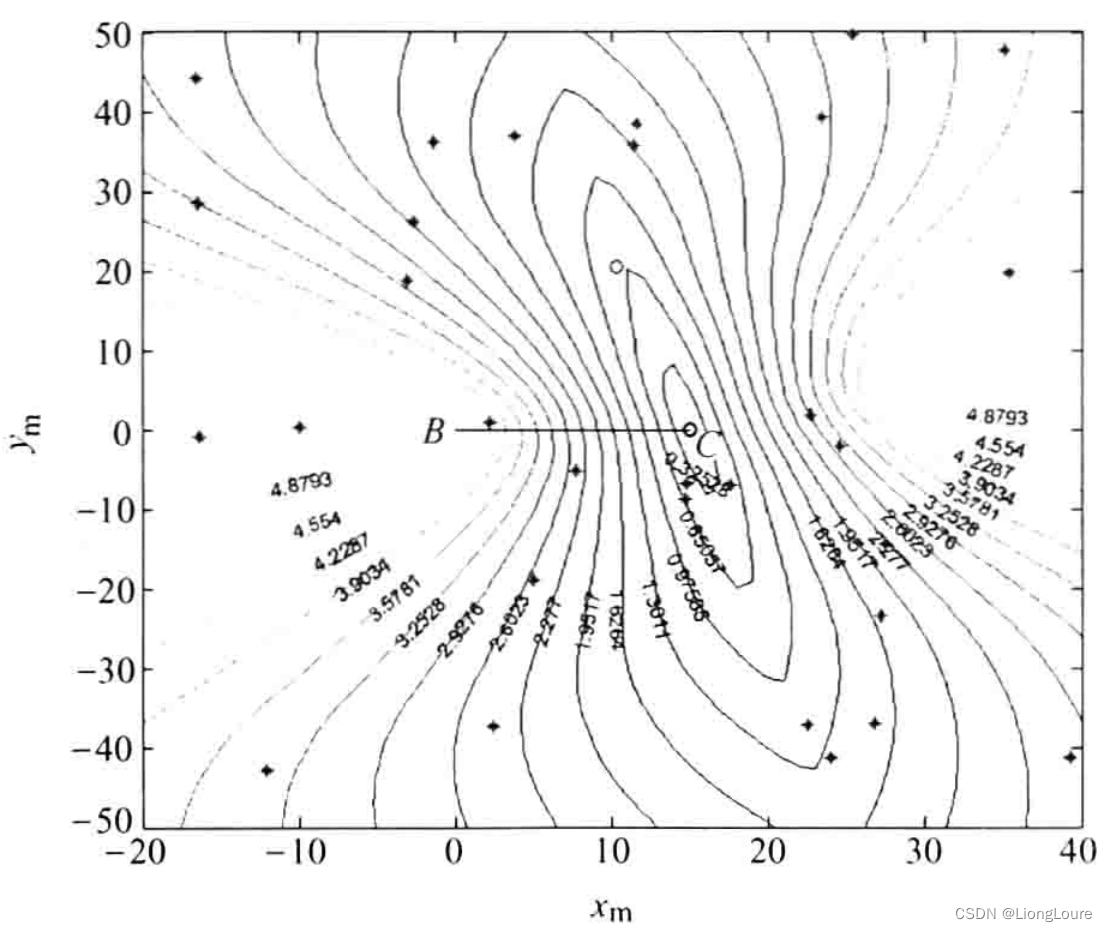
例2-4 曲柄滑块机构连杆平面上鞍线误差曲面。
曲柄滑块机构如下图所示,其尺寸参数为∶l1=5,l2=15,e=2.5{{l}_{1}}=5,{{l}_{2}}=15,e=2.5l1=5,l2=15,e=2.5,在连杆BCBCBC与机架上分别建立运动坐标系{B;i⃗m,j⃗m}\{B;{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}{B;im,jm}与固定坐标系{A;i⃗f,j⃗f}\{A;{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}{A;if,jf},将原动件ABABAB的转角φ∈[0,2π]\varphi \in [0,2\pi ]φ∈[0,2π]以5∘5{}^\circ5∘为间隔离散化,可以得到该曲柄滑块机构的一组离散输入角度φ(i),i=1,..,72{{\varphi }^{(i)}},i=1,..,72φ(i),i=1,..,72,通过连杆机构的位移方程求解,可得到连杆BCBCBC相对于机架ADADAD的离散运动位置(xB(i),yB(i),γB(i)),i=1,..,72(x_{B}^{(i)},y_{B}^{(i)},\gamma _{B}^{(i)}),i=1,..,72(xB(i),yB(i),γB(i)),i=1,..,72。
为形象描述鞍滑点等概念和相关优化搜索算法的收敛性,在连杆平面上区域xm∈[−20,40],ym∈[−50,50]{{x}_{m}}\in [-20,40],{{y}_{m}}\in [-50,50]xm∈[−20,40],ym∈[−50,50]内,两坐标方向均取步长1,得到6161个点,对于每点的离散轨迹曲线,调用鞍线子程序AprF,得到对应鞍线误差。和鞍圆误差曲面一样,绘出连杆平面上点-鞍线误差曲面,如下图所示。
将连杆平面上误差相同的点采用光滑连接形成等高线图,如下图所示。图中点C(15,0)C(15,0)C(15,0)的鞍线误差为5.3291×10−15\text{5}\text{.3291}\times \text{1}{{\text{0}}^{-\text{15}}}5.3291×10−15,对应连杆平面上的铰链点。
在该曲柄滑块机构的连杆平面上,随机生成的30个初始点(用“*”表示),调用鞍滑点子程序AprP进行优化搜索,29个收敛于铰链点CCC,如上图所示,每个初始点平均迭代32步,平均优化时间3.725s。

例2-5 给定的平面运动刚体的十个离散位置(见
表2.1),试求平面运动刚体上的鞍滑点。
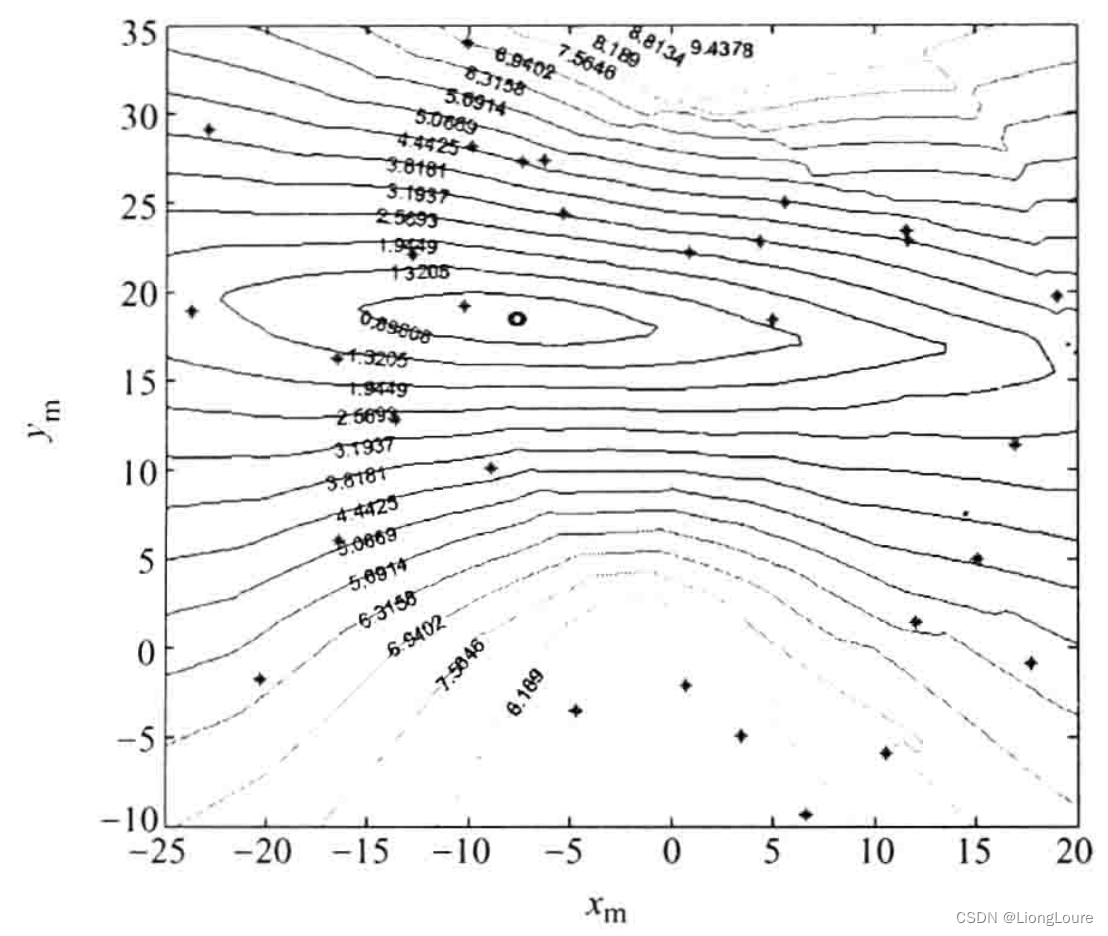
调用鞍滑点子程序AprP,在刚体平面(xm∈[−25,20],ym∈[−10,35]{{x}_{m}}\in [-25,20],{{y}_{m}}\in [-10,35]xm∈[−25,20],ym∈[−10,35])范围内进行鞍滑点的优化搜索。为直观阐述,同样构造十位置运动刚体上点-鞍线误差曲面,其等高线图如下图所示。该误差曲面只有一个谷底,目前其他若干算例也都只有一个谷底。
对随机生成的30个初始点(用“*”表示)进行优化搜索,如下图所示,均收敛于谷底(−7.5887,18.4669)(-7.5887,18.4669)(−7.5887,18.4669),对应的鞍线参数为ϕ=1.5710,h=23.3564\phi =1.5710,h=\text{23}\text{.3564}ϕ=1.5710,h=23.3564,鞍线误差为0.056591。每个初始点平均迭代32步,平均优化时间为3.8822s。
对于三位置和四位置运动刚体上点对应的鞍线、鞍线误差,在2.4.3节和2.4.4节已经阐述。而对于给定四位置运动刚体上的鞍滑点,将在后文连杆机构运动综合的具体算例中给出。