Apollo学习笔记
- 零、目录
- 一、高精地图的作用
- 1.1 相对于传统地图
- 二、高精地图介绍
- 2.1 高精地图构成
- 2.2 高精地图制作
- 2.2.1 地图采集
- 2.2.2 地图制作
- 2.2.3 地图标注工具
- 2.2.4 地图保存
- 三、Apollo高精度地图
- 3.1 高精地图目录结构
- 3.2 高精地图格式
- 3.3 Apollo高精地图API接口
- 四、实践案例
零、目录

一、高精地图的作用
1.1 相对于传统地图
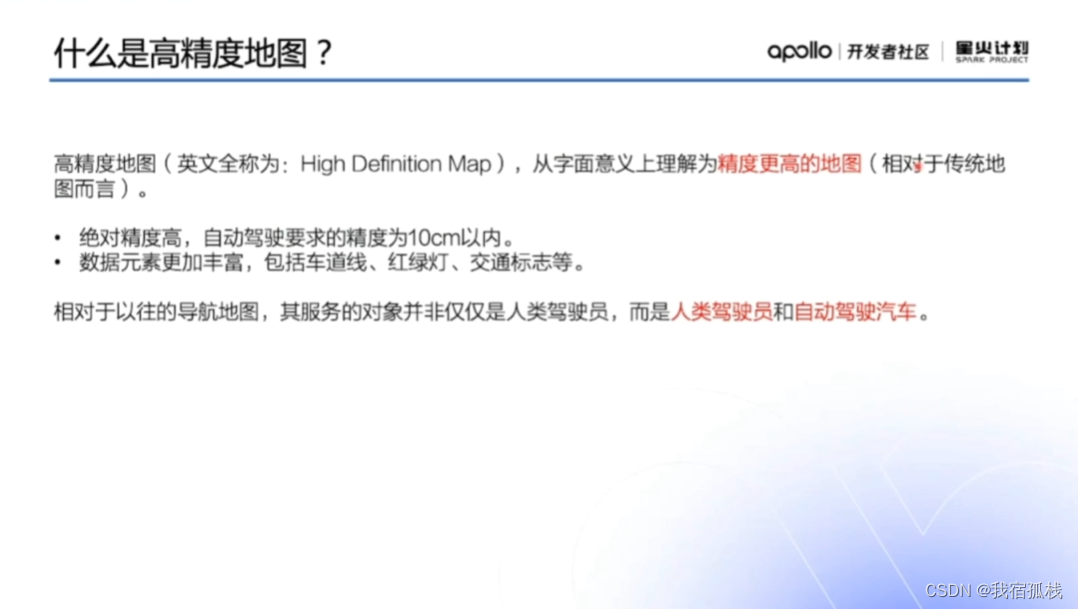
- 绝对精度高,自动驾驶要求精度为10cm以内
- 数据元素更为丰富。
- 服务对象为人类驾驶员和自动驾驶汽车(传统为人类驾驶员)
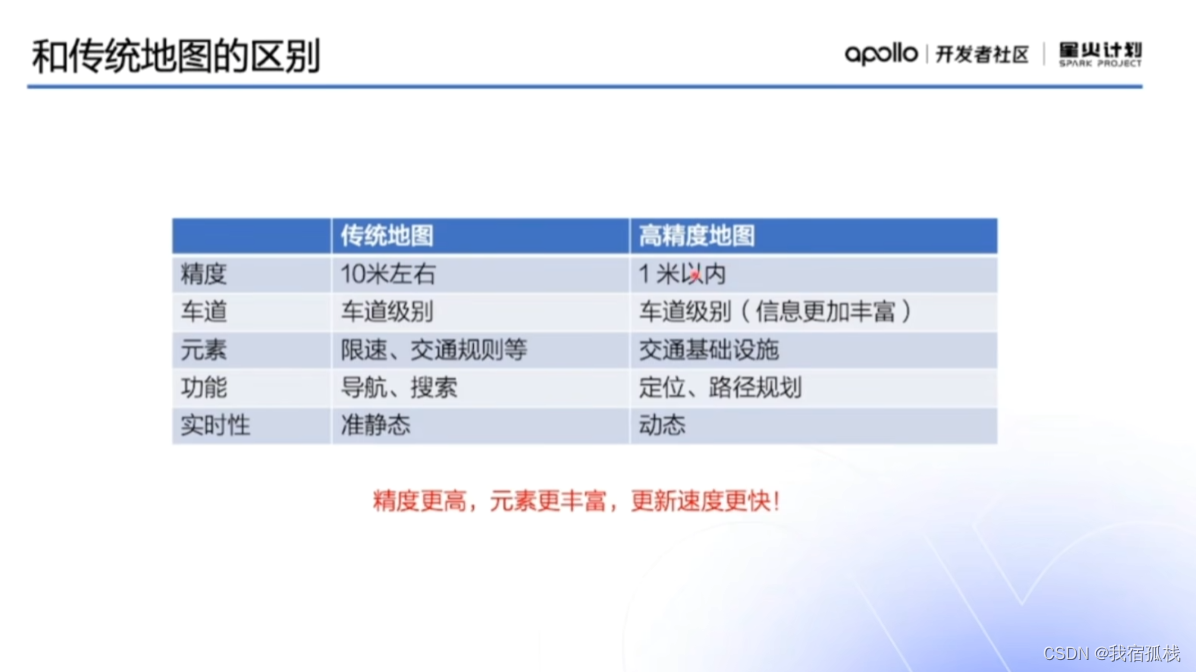
高精地图:车道级别——虚线、实线等
ROI:比如红绿灯,通过高精地图提供一块区域进行红绿灯检测,如此既可提高精度还可以简化计算。

本地云端均有发挥作用。
1、目前能做一个季度更新一次已属不易。
二、高精地图介绍
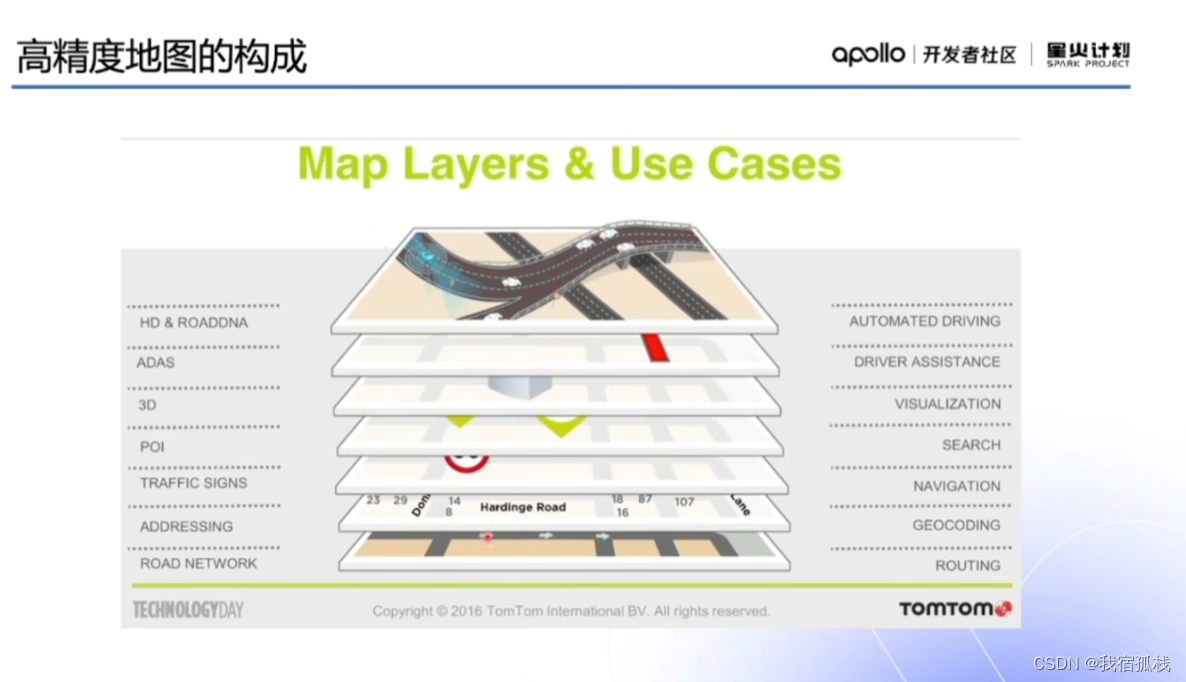
2.1 高精地图构成
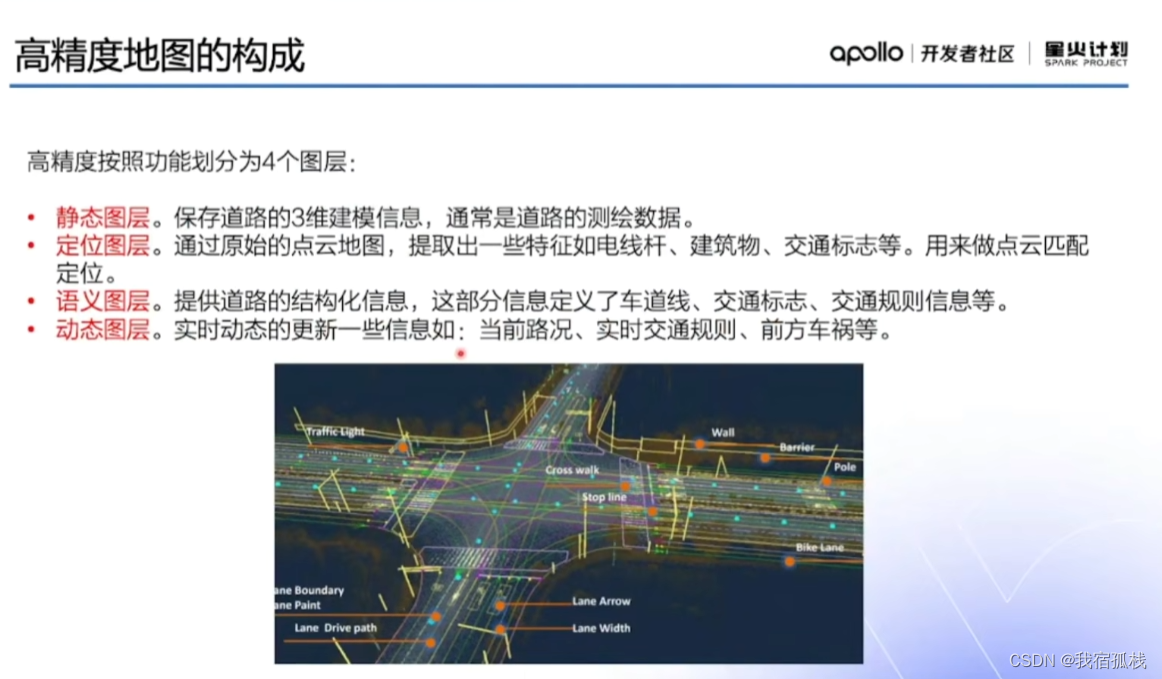
顺序:从下往上。
静态图层:树、路口等,
不同厂家对高精地图的图层描述或有增加或减少。比如如下国外的一个高精地图图层:
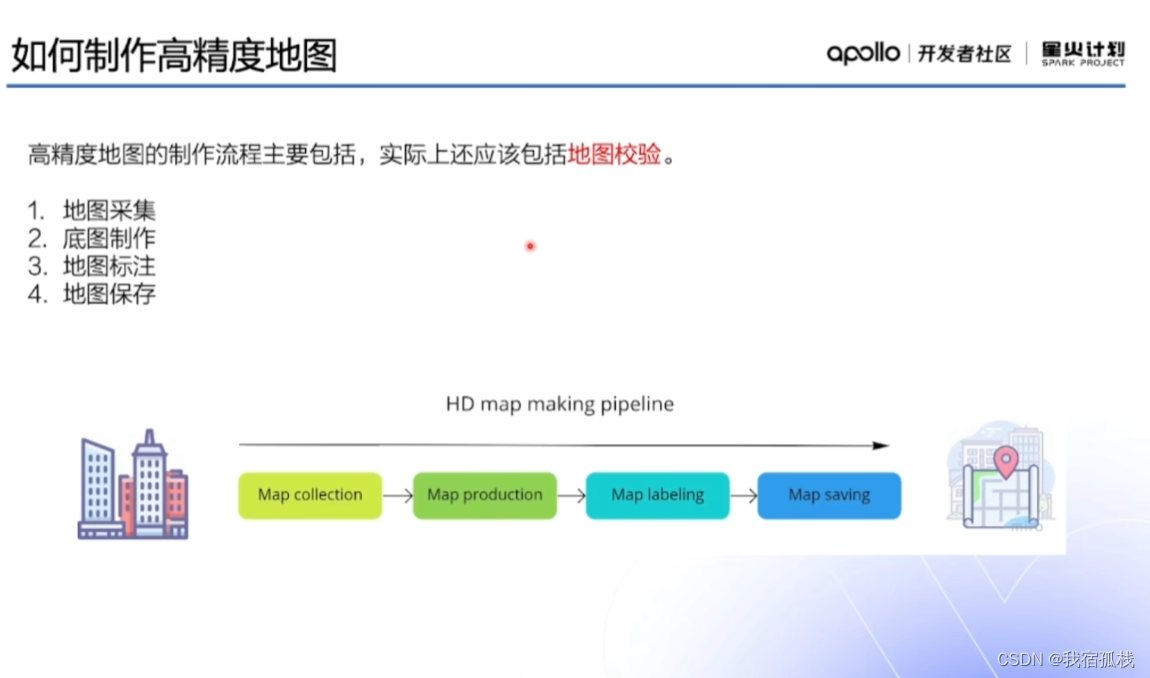
2.2 高精地图制作
2.2.1 地图采集
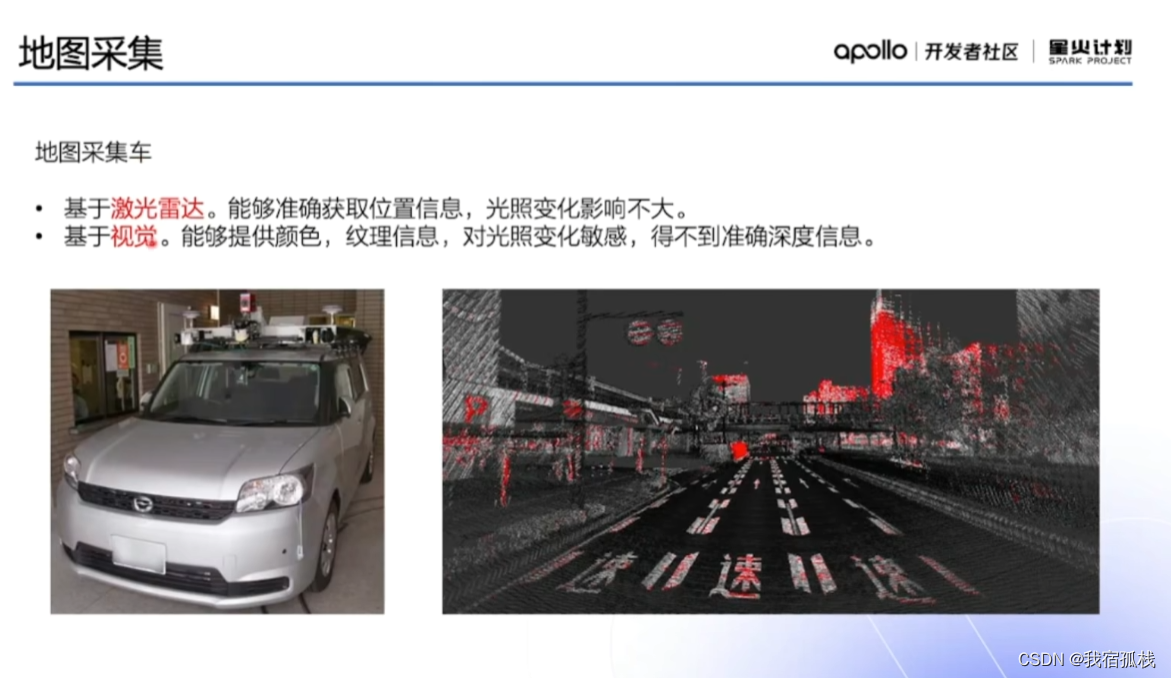
右图灰色红色为激光雷达建立的模型,纹理由视觉相机提供。
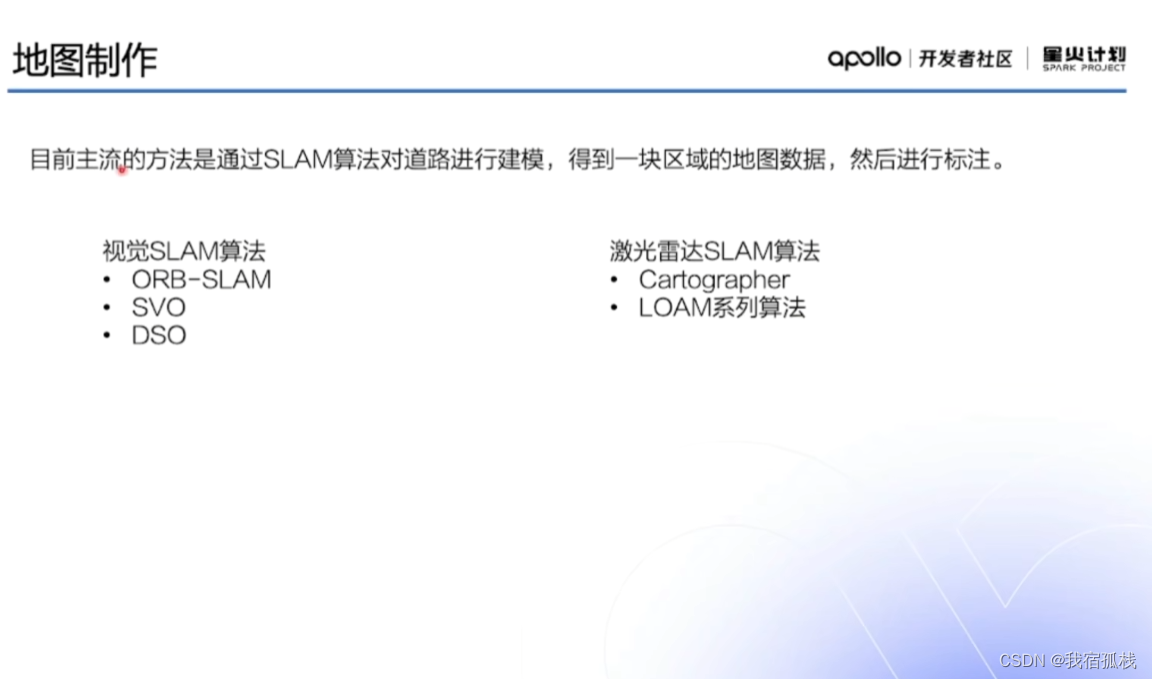
2.2.2 地图制作
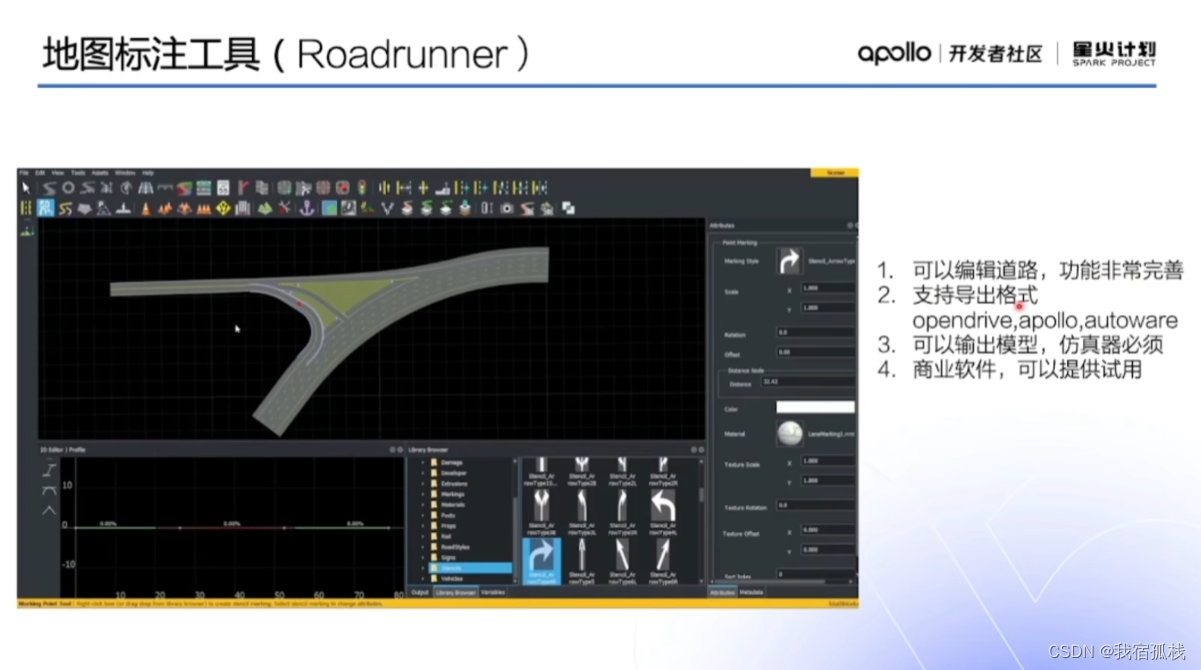
2.2.3 地图标注工具
Roadrunner:继承MATLAB,商业软件。
其余为开源软件。
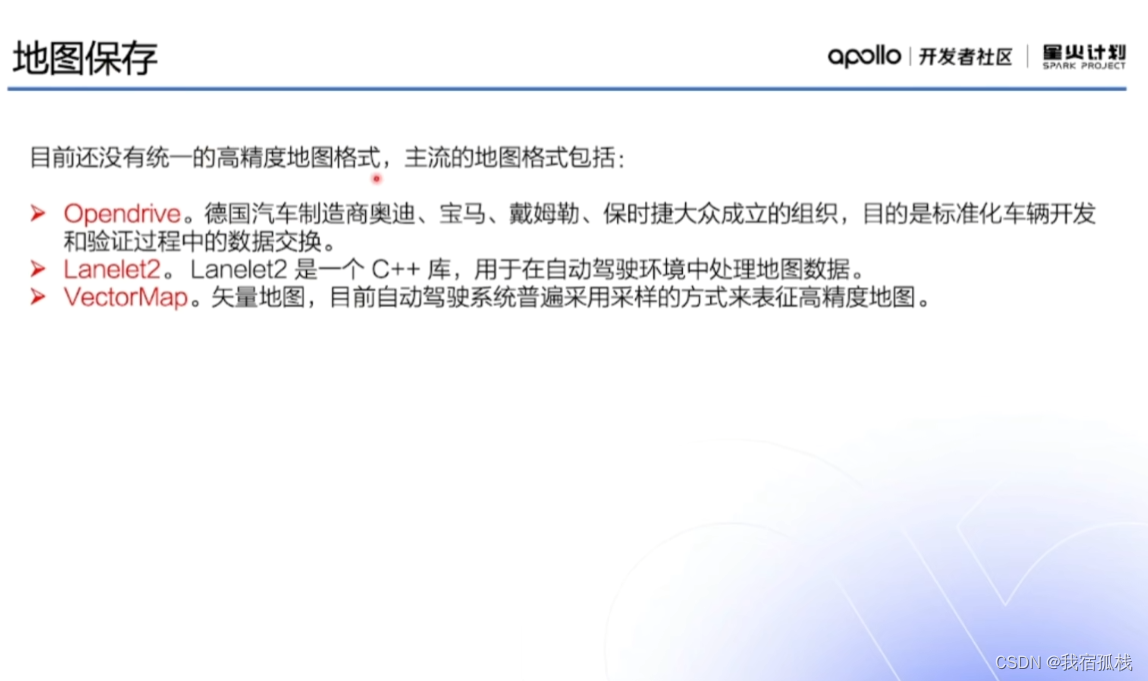
2.2.4 地图保存
三、Apollo高精度地图
如何在Apollo框架中使用高精地图。
3.1 高精地图目录结构
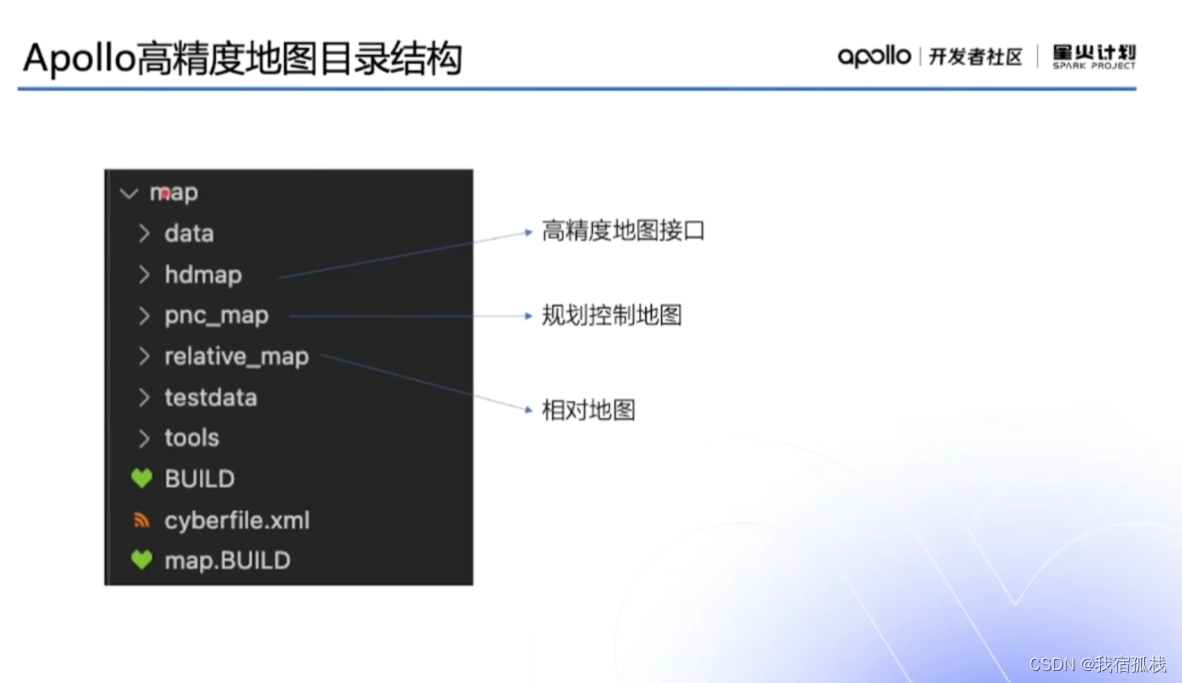
主要关注hdmap。

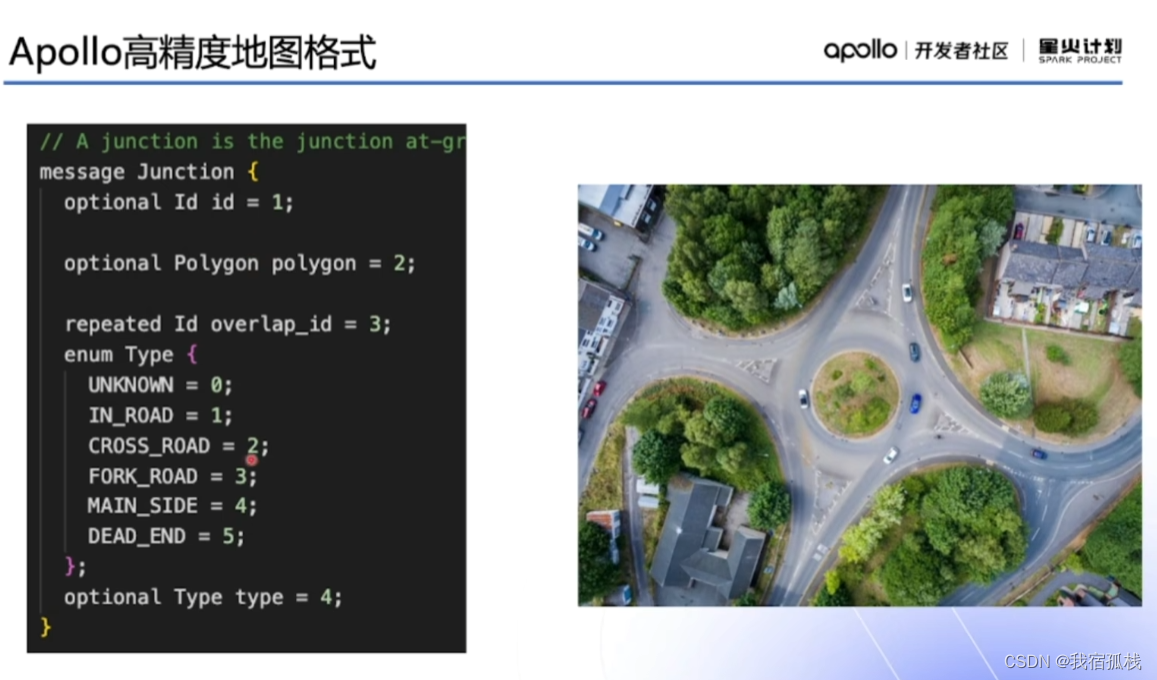
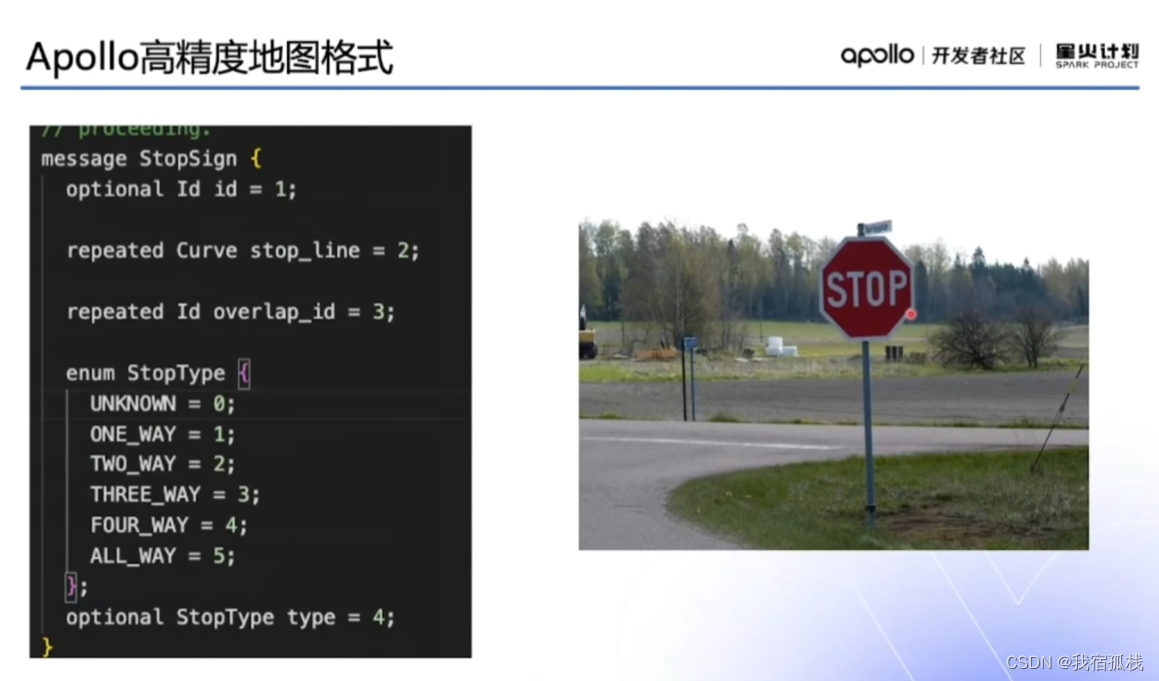
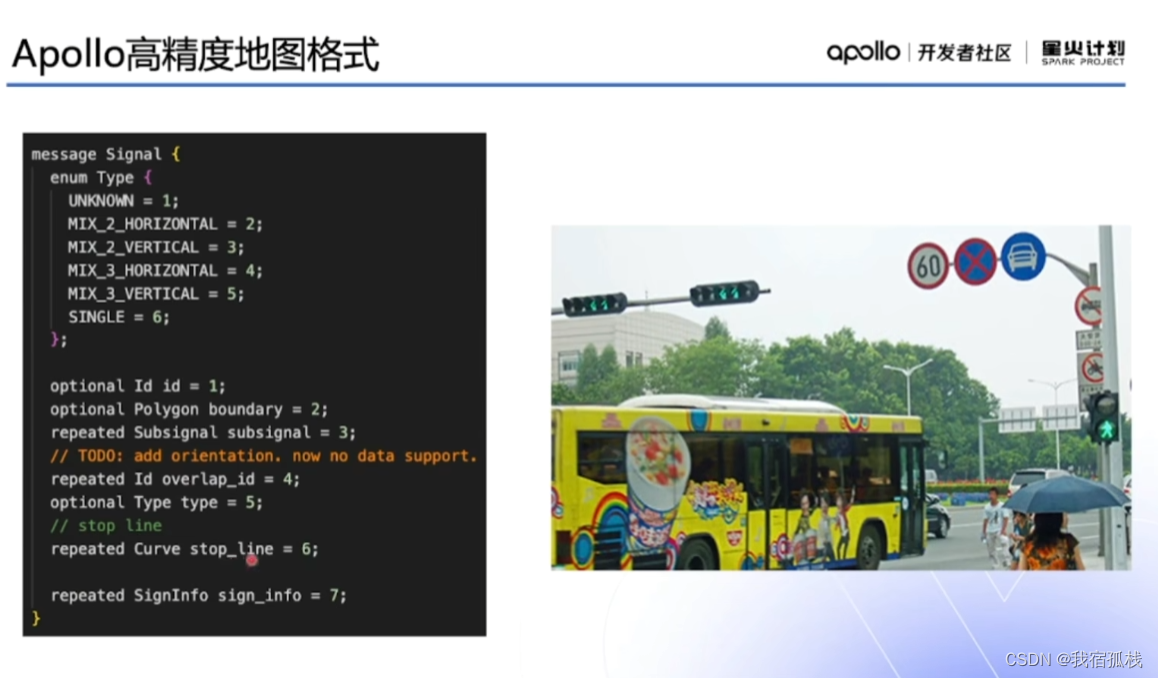
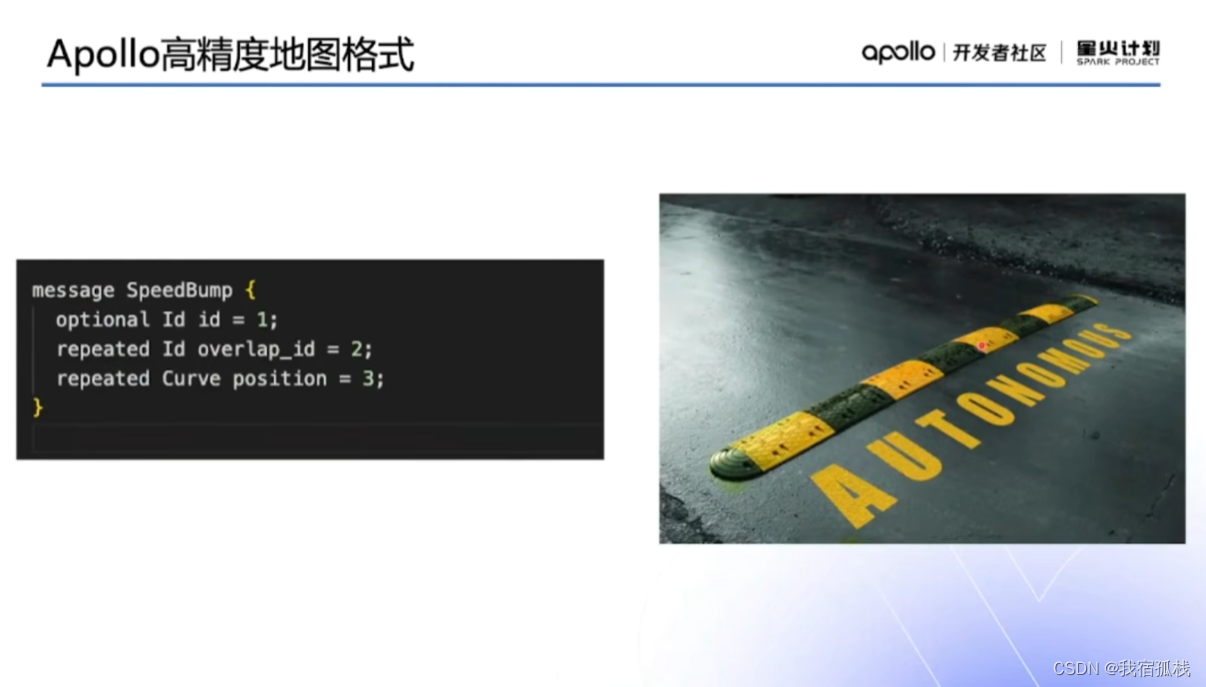
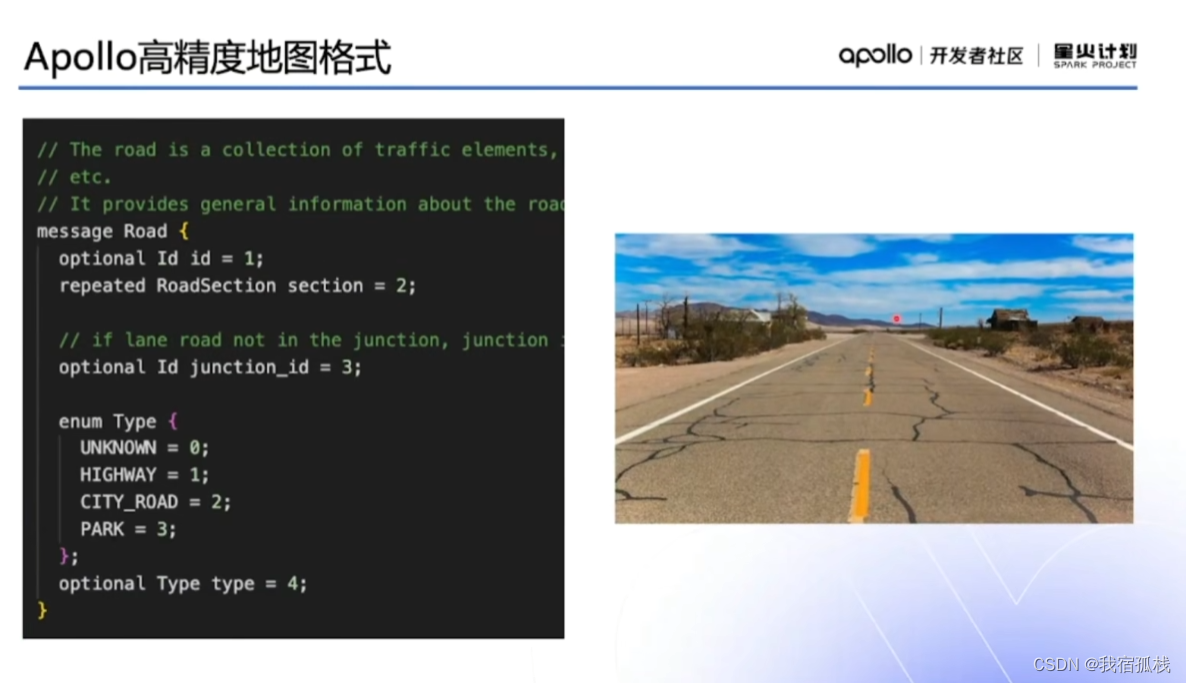
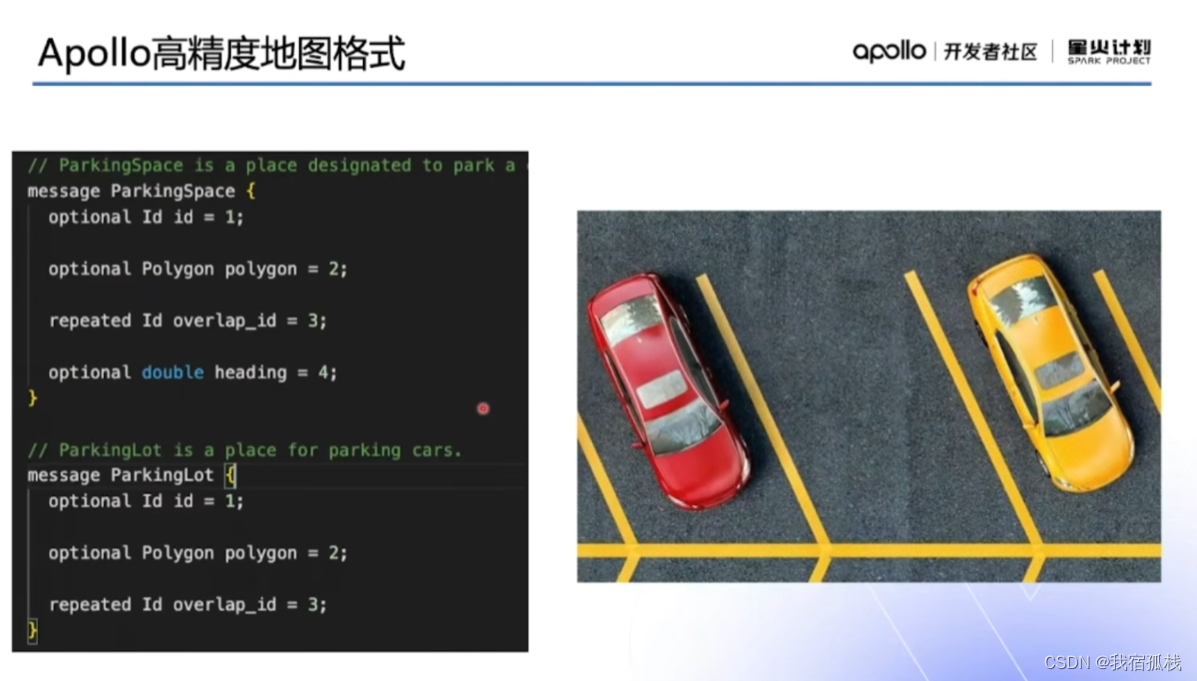
3.2 高精地图格式
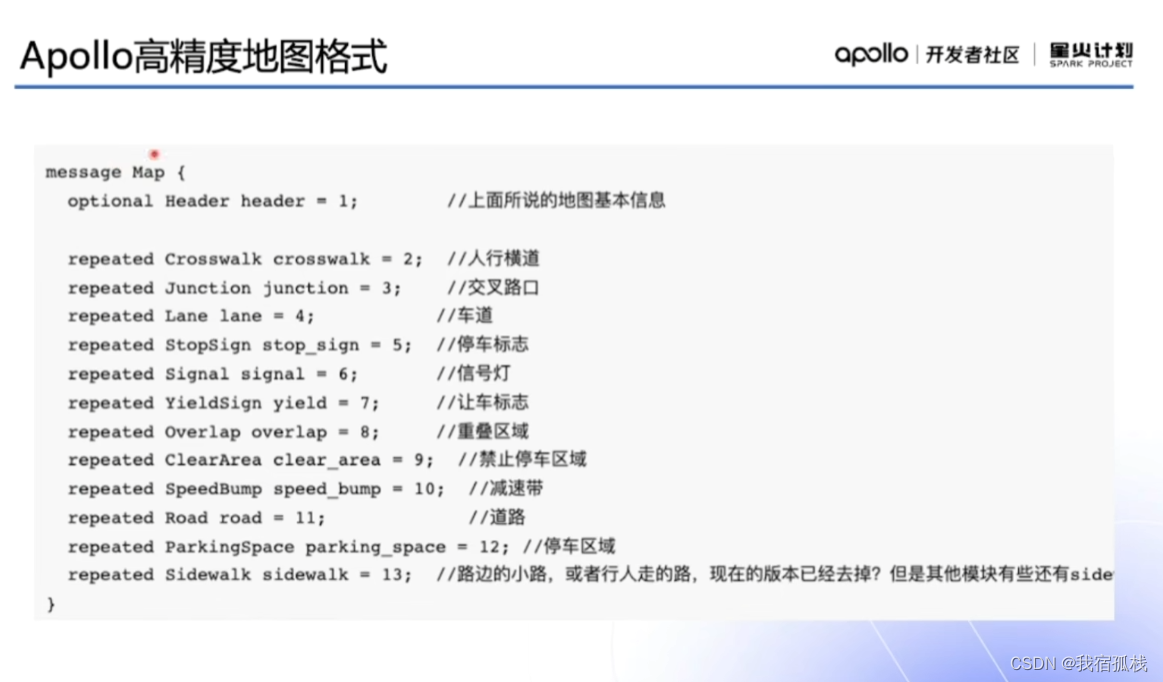
{}内为Map所包含元素。
Overlap:比如信号灯和车道如何关联,通过Overlap。
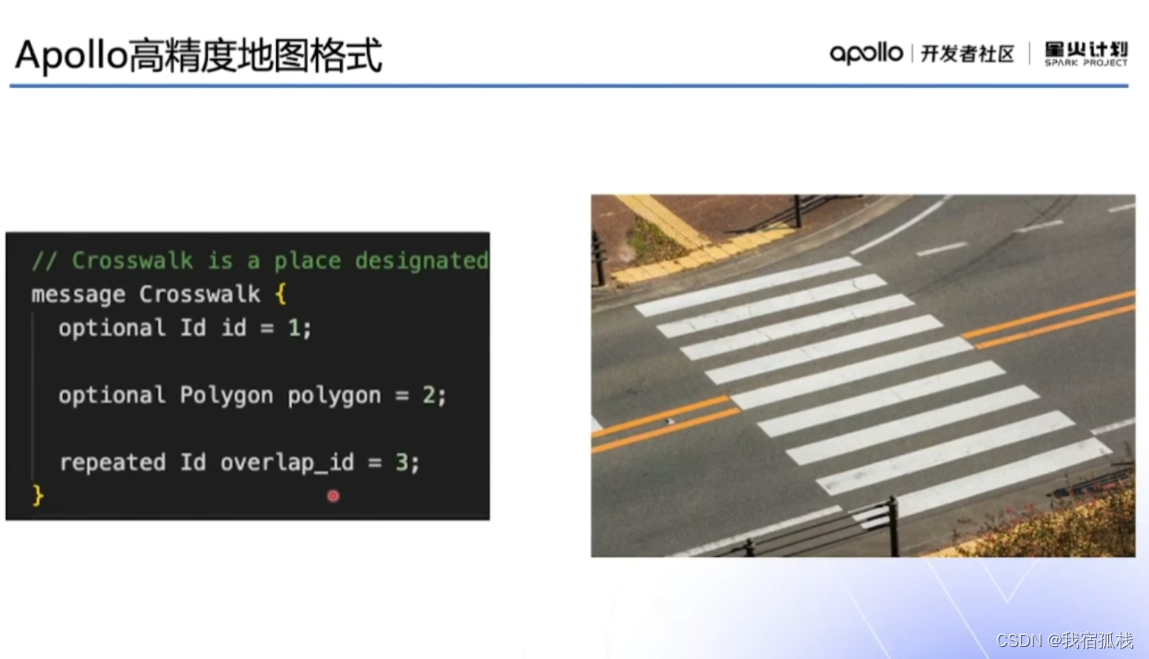
Polygon:形状,一般为长方形。



3.3 Apollo高精地图API接口

地图格式适配器:读取xml格式地图。

高精地图API可实现功能:
- 查找最近的路
- 找到当前需要关注的红绿灯
- 当前有哪些停车位、路口等,,
四、实践案例

针对问题1:可增加过滤算法,只关注感兴趣区域。


![[C++] 初接触 泛型编程—— C++ 模板分析](https://dxyt-july-image.oss-cn-beijing.aliyuncs.com/CSDN/image-20220630172403326.png)