1. 概述
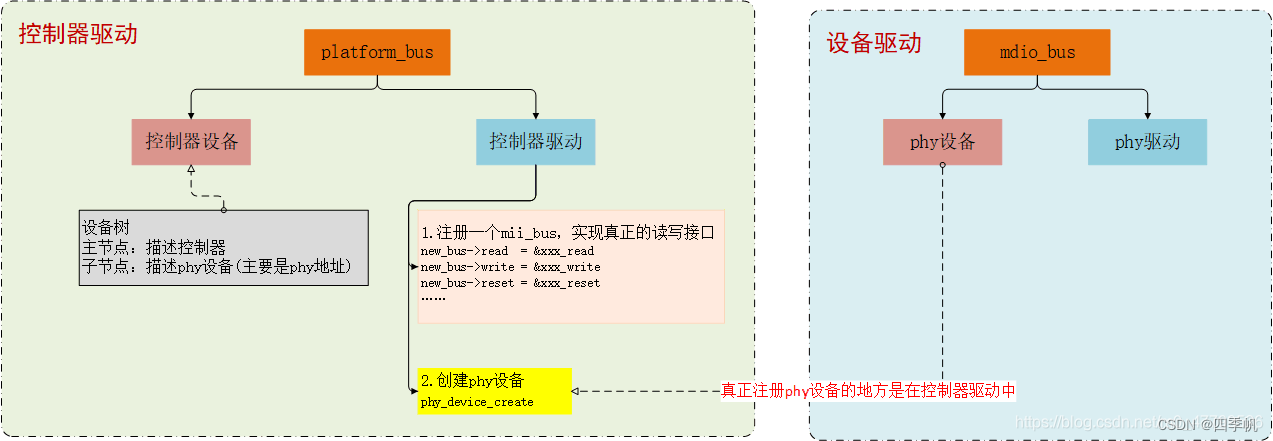
MAC控制器的驱动使用的是platform总线的连接方式,PHY设备驱动是基于device、driver、bus的连接方式。
其驱动涉及如下几个重要部分:
总线 - sturct mii_bus (mii stand for media independent interface)
设备 - struct phy_device
驱动 - struct phy_driver
phy设备不像i2c/spi有一个board_info函数进行设备的添加,而是直接读取phy中的寄存器<根据IEEE的规定,PHY芯片的前16个寄存器的内容必须是固定的>。
2. mdio_bus总线
2.1 总线注册的入口函数
# linux-4.9.225\drivers\net\phy\phy_device.c
static int __init phy_init(void)
{int rc;rc = mdio_bus_init(); //mdio_bus总线的注册if (rc)return rc;rc = phy_drivers_register(genphy_driver,ARRAY_SIZE(genphy_driver), THIS_MODULE); //通用PHY驱动if (rc)mdio_bus_exit();return rc;
}subsys_initcall(phy_init); subsys_initcall(phy_init) 这行的作用非常重要,这一行就决定了内核在启动的时候会调用该函数,注册完了之后紧接着又注册一个通用的PHY驱动。
2.2 总线注册函数— mdio_bus_init解析
# linux-4.9.225\drivers\net\phy\mdio_bus.c
static struct class mdio_bus_class = {.name = "mdio_bus",.dev_release = mdiobus_release,
};static int mdio_bus_match(struct device *dev, struct device_driver *drv)
{struct mdio_device *mdio = to_mdio_device(dev);if (of_driver_match_device(dev, drv))return 1;if (mdio->bus_match)return mdio->bus_match(dev, drv);return 0;
}struct bus_type mdio_bus_type = {.name = "mdio_bus", //总线名称.match = mdio_bus_match, //用来匹配总线上设备和驱动的函数.pm = MDIO_BUS_PM_OPS,
};
EXPORT_SYMBOL(mdio_bus_type);int __init mdio_bus_init(void)
{int ret;ret = class_register(&mdio_bus_class); //注册设备类 (在linux设备模型中,我再仔细讲这个类的概念)if (!ret) {ret = bus_register(&mdio_bus_type);//总线注册if (ret)class_unregister(&mdio_bus_class);}return ret;
}其中
(1) class_register(&mdio_bus_class)执行后会有以下设备类:
/sys/class/mdio_bus
(2)bus_register(&mdio_bus_type)执行后会有以下总线类型:
/sys/bus/mdio_bus
2.3 总线中的match函数解析
/*** mdio_bus_match - determine if given MDIO driver supports the given* MDIO device* @dev: target MDIO device* @drv: given MDIO driver** Description: Given a MDIO device, and a MDIO driver, return 1 if* the driver supports the device. Otherwise, return 0. This may* require calling the devices own match function, since different classes* of MDIO devices have different match criteria.*/
static int mdio_bus_match(struct device *dev, struct device_driver *drv)
{struct mdio_device *mdio = to_mdio_device(dev);if (of_driver_match_device(dev, drv))return 1;if (mdio->bus_match) //实现匹配的函数return mdio->bus_match(dev, drv);return 0;
}3. 设备驱动的注册
在phy_init函数中不仅注册了mdio_bus总线,还注册了一个通用的PHY驱动作为缺省的内核PHY驱动,但是如果PHY芯片的内部寄存器和802.3定义的并不一样或者需要特殊的功能配置以实现更强的功能,这就需要专有的驱动。
对于市场上存在的主流PHY品牌,一般在内核源码 drivers\net\phy目录下都有对应的驱动。本节主要以realtek RTL8211F为例,讲述PHY的驱动,代码如下:
# linux-4.9.225\drivers\net\phy\realtek.c
static struct phy_driver realtek_drvs[] = {......, {.phy_id = 0x001cc916,.name = "RTL8211F Gigabit Ethernet",.phy_id_mask = 0x001fffff,.features = PHY_GBIT_FEATURES,.flags = PHY_HAS_INTERRUPT,.config_aneg = &genphy_config_aneg,.config_init = &rtl8211f_config_init,.read_status = &genphy_read_status,.ack_interrupt = &rtl8211f_ack_interrupt,.config_intr = &rtl8211f_config_intr,.suspend = genphy_suspend,.resume = genphy_resume,},
};module_phy_driver(realtek_drvs); //注册PHY驱动static struct mdio_device_id __maybe_unused realtek_tbl[] = {{ 0x001cc912, 0x001fffff },{ 0x001cc914, 0x001fffff },{ 0x001cc915, 0x001fffff },{ 0x001cc916, 0x001fffff },{ }
};MODULE_DEVICE_TABLE(mdio, realtek_tbl);3.1 phy驱动的注册
同一品牌的PHY设备有多种不同的型号,内核为了支持一次可以注册多个型号的PHY的驱动,在include\linux\phy.h中提供了用于注册PHY驱动的宏module_phy_driver。该宏的定义如下:
# linux-4.9.225\include\linux\phy.h#define phy_module_driver(__phy_drivers, __count) \
static int __init phy_module_init(void) \
{ \return phy_drivers_register(__phy_drivers, __count, THIS_MODULE); \
} #define module_phy_driver(__phy_drivers) \phy_module_driver(__phy_drivers, ARRAY_SIZE(__phy_drivers))phy_driver_register定义如下(注意这里与老版本内核有一定的改动)
/*** phy_driver_register - register a phy_driver with the PHY layer* @new_driver: new phy_driver to register* @owner: module owning this PHY*/
int phy_driver_register(struct phy_driver *new_driver, struct module *owner)
{int retval;new_driver->mdiodrv.flags |= MDIO_DEVICE_IS_PHY;new_driver->mdiodrv.driver.name = new_driver->name;//驱动名称new_driver->mdiodrv.driver.bus = &mdio_bus_type; //驱动挂载的总线new_driver->mdiodrv.driver.probe = phy_probe; //PHY设备和驱动匹配后调用的probe函数 new_driver->mdiodrv.driver.remove = phy_remove;new_driver->mdiodrv.driver.owner = owner;retval = driver_register(&new_driver->mdiodrv.driver); //向linux设备模型框架中注册device_driver驱动if (retval) {pr_err("%s: Error %d in registering driver\n",new_driver->name, retval);return retval;}pr_debug("%s: Registered new driver\n", new_driver->name);return 0;
}int phy_drivers_register(struct phy_driver *new_driver, int n,struct module *owner)
{int i, ret = 0;for (i = 0; i < n; i++) {ret = phy_driver_register(new_driver + i, owner);//注册数组中所有的phy驱动if (ret) {while (i-- > 0)phy_driver_unregister(new_driver + i);break;}}return ret;
}3.2 MODULE_DEVICE_TABLE(mdio, realtek_tbl)解析
宏定义展开后如下:
#define MODULE_DEVICE_TABLE(mdio, realtek_tbl) \
extern const struct mdio_device_id __mod_mdio__realtek_tbl_device_table \__attribute__ ((unused, "realtek_tbl")))4. 设备驱动与控制器驱动之间的关系图