Pytorch Tutorial
文章目录
- Pytorch Tutorial
- Chapter 2. Autograd
- 1. Review Matrix Calculus
- 1.1 Definition向量对向量求导
- 1.2 Definition标量对向量求导
- 1.3 Definition标量对矩阵求导
- 2.关于autograd的说明
- 3. grad的计算
- 3.1 Manual手动计算
- 3.2 backward()自动计算
- Reference
Chapter 2. Autograd
1. Review Matrix Calculus
1.1 Definition向量对向量求导
Define the derivative of a function mapping f : R n → R m f:\mathbb{R}^n\to\mathbb{R}^m f:Rn→Rm as the n × m n\times m n×m matrix of partial derivatives. That is, if x ∈ R n , f ( x ) ∈ R m x\in\mathbb{R}^n,f(x)\in\mathbb{R}^m x∈Rn,f(x)∈Rm, the derivative of f f f with respect to x x x is defined as
[ ∂ f ∂ x ] i j = ∂ f i ∂ x i \begin{bmatrix} \frac{\partial f}{\partial x} \end{bmatrix}_{ij} = \frac{\partial f_i}{\partial x_i} [∂x∂f]ij=∂xi∂fi
Let
x = [ x 1 x 2 ⋮ x n ] , f ( x ) = [ f 1 ( x ) f 2 ( x ) ⋮ f m ( x ) ] x = \begin{bmatrix} x_1 \\ x_2 \\ \vdots \\ x_n \end{bmatrix}, f(x) = \begin{bmatrix} f_1(x) \\ f_2(x) \\ \vdots \\ f_m(x) \end{bmatrix} x= x1x2⋮xn ,f(x)= f1(x)f2(x)⋮fm(x)
then we define the Jacobian Matrix
∂ f ∂ x = [ ∂ f 1 ∂ x 1 ∂ f 2 ∂ x 1 ⋯ ∂ f m ∂ x 1 ∂ f 1 ∂ x 2 ∂ f 2 ∂ x 2 ⋯ ∂ f m ∂ x 2 ⋮ ⋮ ⋱ ⋮ ∂ f 1 ∂ x n ∂ f 2 ∂ x n ⋯ ∂ f m ∂ x n ] \frac{\partial f}{\partial x} = \begin{bmatrix} \frac{\partial f_1}{\partial x_1} & \frac{\partial f_2}{\partial x_1} & \cdots & \frac{\partial f_m}{\partial x_1} \\ \frac{\partial f_1}{\partial x_2} & \frac{\partial f_2}{\partial x_2} & \cdots & \frac{\partial f_m}{\partial x_2} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial f_1}{\partial x_n} & \frac{\partial f_2}{\partial x_n} & \cdots & \frac{\partial f_m}{\partial x_n} \\ \end{bmatrix} ∂x∂f= ∂x1∂f1∂x2∂f1⋮∂xn∂f1∂x1∂f2∂x2∂f2⋮∂xn∂f2⋯⋯⋱⋯∂x1∂fm∂x2∂fm⋮∂xn∂fm
1.2 Definition标量对向量求导
If f f f is scalar, one has
∂ f ∂ x = [ ∂ f ∂ x 1 ∂ f ∂ x 2 ⋮ ∂ f ∂ x n ] \frac{\partial f}{\partial x} = \begin{bmatrix} \frac{\partial f}{\partial x_1} \\ \frac{\partial f}{\partial x_2} \\ \vdots \\ \frac{\partial f}{\partial x_n} \\ \end{bmatrix} ∂x∂f= ∂x1∂f∂x2∂f⋮∂xn∂f
这其实是一种分母布局
1.3 Definition标量对矩阵求导
Now we give some results on the derivative of scalar functions of a matrix. Let X = [ x i j ] X=[x_{ij}] X=[xij] be a matrix of order m × n m\times n m×n and let y = f ( X ) y=f(X) y=f(X) be a scalar function of X X X. The derivative of y y y with respect to X X X, denoted by ∂ y ∂ X \frac{\partial y}{\partial X} ∂X∂y, is defined as the following matrix of order m × n m\times n m×n,
G = ∂ y ∂ X = [ ∂ y ∂ x 11 ∂ y ∂ x 12 ⋯ ∂ y ∂ x 1 n ∂ y ∂ x 21 ∂ y ∂ x 22 ⋯ ∂ y ∂ x 2 n ⋮ ⋮ ⋱ ⋮ ∂ y ∂ x m 1 ∂ y ∂ x m 2 ⋯ ∂ y ∂ x m n ] = [ ∂ y ∂ x i j ] G = \frac{\partial y}{\partial X} = \begin{bmatrix} \frac{\partial y}{\partial x_{11}} & \frac{\partial y}{\partial x_{12}} & \cdots & \frac{\partial y}{\partial x_{1n}} \\ \frac{\partial y}{\partial x_{21}} & \frac{\partial y}{\partial x_{22}} & \cdots & \frac{\partial y}{\partial x_{2n}} \\ \vdots & \vdots & \ddots & \vdots& \\ \frac{\partial y}{\partial x_{m1}} & \frac{\partial y}{\partial x_{m2}} & \cdots & \frac{\partial y}{\partial x_{mn}} \end{bmatrix} = \Big[\frac{\partial y}{\partial x_{ij}} \Big] G=∂X∂y= ∂x11∂y∂x21∂y⋮∂xm1∂y∂x12∂y∂x22∂y⋮∂xm2∂y⋯⋯⋱⋯∂x1n∂y∂x2n∂y⋮∂xmn∂y =[∂xij∂y]
2.关于autograd的说明
torch.Tensor 是包的核心类。如果将其属性 tensor.requires_grad 设置为 True,则会开始跟踪针对 tensor 的所有操作。完成计算后,您可以调用 tensor.backward() 来自动计算所有梯度。该张量的梯度将累积到 tensor.grad 属性中。
要停止 tensor 历史记录的跟踪,您可以调用 tensor.detach(),它将其与计算历史记录分离,并防止将来的计算被跟踪。
要停止跟踪历史记录(和使用内存),您还可以将代码块使用 with torch.no_grad(): 包装起来。在评估模型时,这是特别有用,因为模型在训练阶段具有 requires_grad = True 的可训练参数有利于调参,但在评估阶段我们不需要梯度。
还有一个类对于 autograd 实现非常重要那就是 Function。Tensor 和 Function 互相连接并构建一个非循环图,它保存整个完整的计算过程的历史信息。每个张量都有一个 tensor.grad_fn 属性保存着创建了张量的 Function 的引用,(如果用户自己创建张量,则 grad_fn=None)。
如果你想计算导数,你可以调用 tensor.backward()。如果 Tensor 是标量(即它包含一个元素数据),则不需要指定任何参数backward(),但是如果它有更多元素,则需要指定一个gradient 参数来指定张量的形状。
最后的计算结果保存在tensor.grad属性里
- 使用
tensor.requires_grad在初始化时,设置跟踪梯度
import torch
import numpy as np
x = torch.ones(2,2, requires_grad=True)
print(x)
结果如下
tensor([[1., 1.],[1., 1.]], requires_grad=True)
- 设置了跟踪梯度的tensor,将会出现
tensor.grad_fn的属性,用于记录上次计算的Function
y = torch.add(x, 1)
print(y)
print(y.grad_fn)
结果如下
tensor([[2., 2.],[2., 2.]], grad_fn=<AddBackward0>)
<AddBackward0 object at 0x0000020D723EBE80>
tensor.requires_grad_(True / False)会改变张量的 requires_grad 标记。 如果没有提供相应的参数输入的标记默认为 False。
a = torch.randn(2,2)
a = (a * 3) / (a-1)
print(a)
a.requires_grad_(True)
print(a)
a = a + 1
print(a)
tensor([[ 0.0646, -46.3478],[ 5.6683, -0.8896]])
tensor([[ 0.0646, -46.3478],[ 5.6683, -0.8896]], requires_grad=True)
tensor([[ 1.0646, -45.3478],[ 6.6683, 0.1104]], grad_fn=<AddBackward0>)
3. grad的计算
3.1 Manual手动计算
- 可以使用函数
torch.autograd.grad()来手动计算梯度,详细可参考此处

例如计算 y = x 1 2 + x 2 2 + x 1 x 2 y = x_1^2 + x_2^2 + x_1x_2 y=x12+x22+x1x2的梯度
x1 = torch.tensor(3., requires_grad=True)
x2 = torch.tensor(1., requires_grad=True)
y = x1**2+x2**2+x1*x2# 求一阶导数
# torch.autograd.grad(y, x1,retain_graph=True, create_graph=True)
x1_1 = torch.autograd.grad(y, x1, retain_graph=True, create_graph=True)[0]
x2_1 = torch.autograd.grad(y, x2, retain_graph=True, create_graph=True)[0]
print(x1_1,x2_1)# 求二阶混合偏导数
x1_11 = torch.autograd.grad(x1_1, x1)[0]
x1_12 = torch.autograd.grad(x1_1, x2)[0]
x2_21 = torch.autograd.grad(x2_1, x1)[0]
x2_22 = torch.autograd.grad(x2_1, x2)[0]
print(x1_11,x1_12,x2_21,x2_22)
结果如下
tensor(7., grad_fn=<AddBackward0>) tensor(5., grad_fn=<AddBackward0>)
tensor(2.) tensor(1.) tensor(1.) tensor(2.)
3.2 backward()自动计算
当输出是标量scalar函数时
考虑如下的计算问题
x = torch.ones(2,2, requires_grad=True)
y = x + 2
print(y)
z = y * y * 3
out = z.mean()
print(z, out) #输出out是一个标量
out.backward()
print(x.grad)
输出是
tensor([[3., 3.],[3., 3.]], grad_fn=<AddBackward0>)
tensor([[27., 27.],[27., 27.]], grad_fn=<MulBackward0>) tensor(27., grad_fn=<MeanBackward0>)
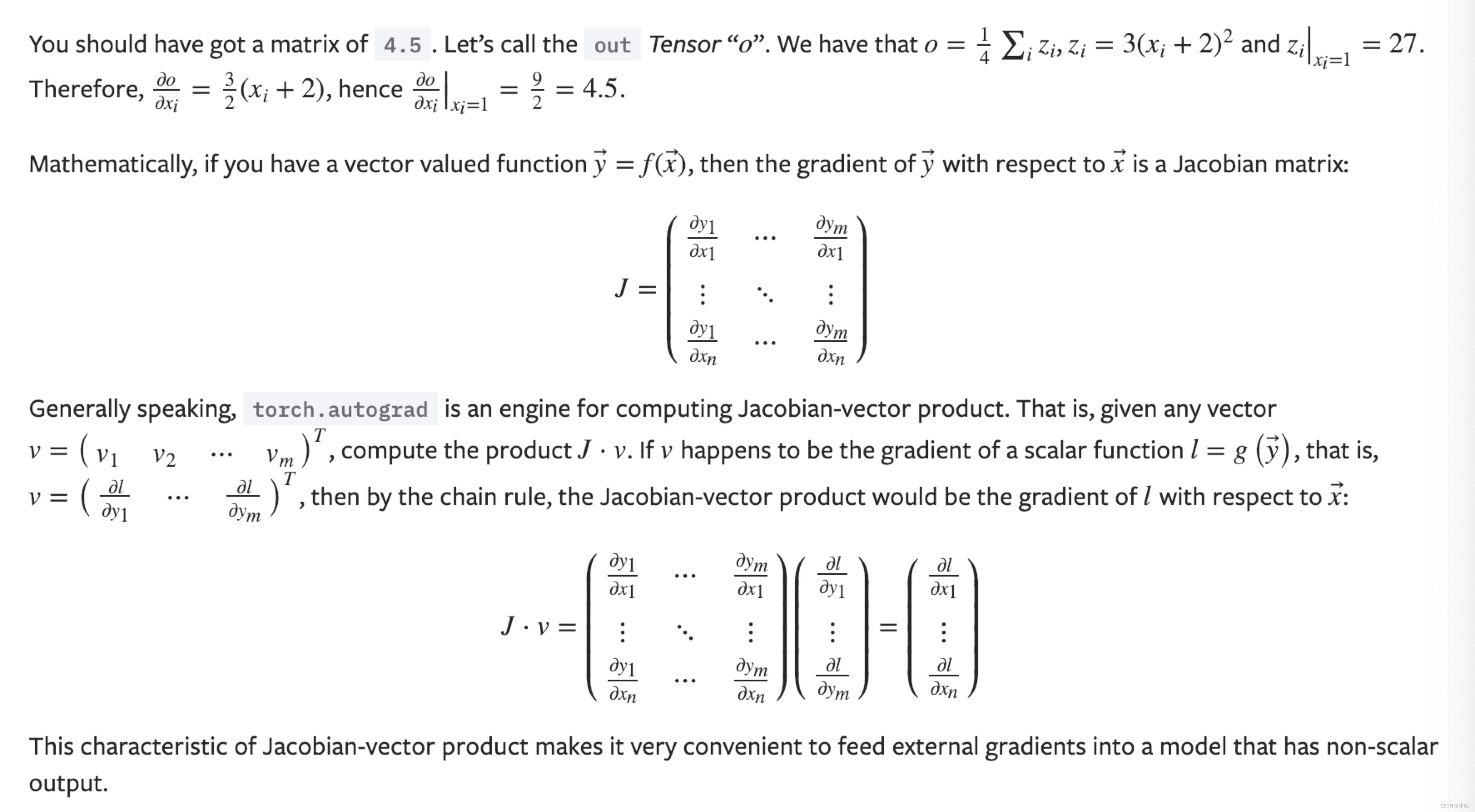
tensor([[4.5000, 4.5000],[4.5000, 4.5000]])
X = [ x 1 x 2 x 3 x 4 ] = [ 1 1 1 1 ] X =\begin{bmatrix} x_1 & x_2 \\ x_3 & x_4 \end{bmatrix} = \begin{bmatrix} 1 & 1 \\ 1 & 1 \end{bmatrix} X=[x1x3x2x4]=[1111]
中间变量是
Z = [ z 1 z 2 z 3 z 4 ] = [ 3 ( x 1 + 2 ) 2 3 ( x 1 + 2 ) 2 3 ( x 1 + 2 ) 2 3 ( x 1 + 2 ) 2 ] Z =\begin{bmatrix} z_1 & z_2 \\ z_3 & z_4 \end{bmatrix} = \begin{bmatrix} 3(x_1+2)^2 & 3(x_1+2)^2 \\ 3(x_1+2)^2 & 3(x_1+2)^2 \end{bmatrix} Z=[z1z3z2z4]=[3(x1+2)23(x1+2)23(x1+2)23(x1+2)2]
最后获得是输出是
out = 1 4 ∑ i = 1 z i = 1 4 ( z 1 + z 2 + z 3 + z 4 ) = 1 4 ( 3 ( x 1 + 2 ) 2 + 3 ( x 2 + 2 ) 2 + 3 ( x 3 + 2 ) 2 + 3 ( x 4 + 2 ) 2 ) = f ( x ) \begin{aligned} \text{out} & = \frac{1}{4}\sum_{i=1} z_i = \frac{1}{4}(z_1+z_2+z_3+z_4) \\ & = \frac{1}{4}(3(x_1+2)^2+3(x_2+2)^2+3(x_3+2)^2+3(x_4+2)^2) \\ & = f(\mathrm{x}) \end{aligned} out=41i=1∑zi=41(z1+z2+z3+z4)=41(3(x1+2)2+3(x2+2)2+3(x3+2)2+3(x4+2)2)=f(x)
其中将矩阵 X X X和矩阵 Z Z Z中的所有元素拼接为向量
x = [ x 1 , x 2 , x 3 , x 4 ] T z = [ z 1 , z 2 , z 3 , z 4 ] T \mathrm{x} = [x_1,x_2,x_3,x_4]^T \\ \mathrm{z} = [z_1,z_2,z_3,z_4]^T x=[x1,x2,x3,x4]Tz=[z1,z2,z3,z4]T
我们利用矩阵求导的链式法则
∂ f ∂ x = f ( x ) ∂ x = ∂ z ∂ x ∂ f ( x ) ∂ z \frac{\partial f}{\partial \mathrm{x}} = \frac{f(\mathrm{x})}{\partial \mathrm{x}} = \frac{\partial \mathrm{z}}{\partial \mathrm{x}} \frac{\partial f(\mathrm{x})}{\partial \mathrm{z}} ∂x∂f=∂xf(x)=∂x∂z∂z∂f(x)
再利用标量函数对矩阵导数的定义,则有
∂ f ∂ x = [ ∂ z 1 ∂ x 1 ∂ z 2 ∂ x 1 ∂ z 3 ∂ x 1 ∂ z 4 ∂ x 1 ∂ z 1 ∂ x 2 ∂ z 2 ∂ x 2 ∂ z 3 ∂ x 2 ∂ z 4 ∂ x 2 ∂ z 1 ∂ x 3 ∂ z 2 ∂ x 3 ∂ z 3 ∂ x 3 ∂ z 4 ∂ x 3 ∂ z 1 ∂ x 4 ∂ z 2 ∂ x 4 ∂ z 3 ∂ x 4 ∂ z 4 ∂ x 4 ] [ ∂ f ∂ z 1 ∂ f ∂ z 2 ∂ f ∂ z 3 ∂ f ∂ z 4 ] = [ 6 ( x 1 + 2 ) 0 0 0 0 6 ( x 2 + 2 ) 0 0 0 0 6 ( x 3 + 2 ) 0 0 0 0 6 ( x 4 + 2 ) ] [ 1 4 1 4 1 4 1 4 ] = [ 4.5 4.5 4.5 4.5 ] \frac{\partial f}{\partial \mathrm{x}} = \begin{bmatrix} \frac{\partial z_1}{\partial x_1} & \frac{\partial z_2}{\partial x_1} & \frac{\partial z_3}{\partial x_1} & \frac{\partial z_4}{\partial x_1} \\ \frac{\partial z_1}{\partial x_2} & \frac{\partial z_2}{\partial x_2} & \frac{\partial z_3}{\partial x_2} & \frac{\partial z_4}{\partial x_2} \\ \frac{\partial z_1}{\partial x_3} & \frac{\partial z_2}{\partial x_3} & \frac{\partial z_3}{\partial x_3} & \frac{\partial z_4}{\partial x_3} \\ \frac{\partial z_1}{\partial x_4} & \frac{\partial z_2}{\partial x_4} & \frac{\partial z_3}{\partial x_4} & \frac{\partial z_4}{\partial x_4} \end{bmatrix} \begin{bmatrix} \frac{\partial f}{\partial z_1} \\ \frac{\partial f}{\partial z_2} \\ \frac{\partial f}{\partial z_3} \\ \frac{\partial f}{\partial z_4} \end{bmatrix}= \begin{bmatrix} 6(x_1+2) & 0 & 0 & 0 \\ 0 & 6(x_2+2) & 0 & 0 \\ 0 & 0 & 6(x_3+2) & 0 \\ 0 & 0 & 0 & 6(x_4+2) \end{bmatrix} \begin{bmatrix} \frac{1}{4} \\ \frac{1}{4} \\ \frac{1}{4} \\ \frac{1}{4} \end{bmatrix} = \begin{bmatrix} 4.5 \\ 4.5 \\ 4.5 \\ 4.5 \\ \end{bmatrix} ∂x∂f= ∂x1∂z1∂x2∂z1∂x3∂z1∂x4∂z1∂x1∂z2∂x2∂z2∂x3∂z2∂x4∂z2∂x1∂z3∂x2∂z3∂x3∂z3∂x4∂z3∂x1∂z4∂x2∂z4∂x3∂z4∂x4∂z4 ∂z1∂f∂z2∂f∂z3∂f∂z4∂f = 6(x1+2)00006(x2+2)00006(x3+2)00006(x4+2) 41414141 = 4.54.54.54.5
所以最后获得关于的矩阵 X X X的导数为
∂ f ∂ X = [ ∂ f ∂ x 1 ∂ f ∂ x 2 ∂ f ∂ x 3 ∂ f ∂ x 4 ] = [ 4.5 4.5 4.5 4.5 ] \frac{\partial f}{\partial X} = \begin{bmatrix} \frac{\partial f}{\partial x_1} & \frac{\partial f}{\partial x_2} \\ \frac{\partial f}{\partial x_3} & \frac{\partial f}{\partial x_4} \end{bmatrix} = \begin{bmatrix} 4.5 & 4.5 \\ 4.5 & 4.5 \\ \end{bmatrix} ∂X∂f=[∂x1∂f∂x3∂f∂x2∂f∂x4∂f]=[4.54.54.54.5]
当输出是张量tensor函数时
x = torch.tensor([[1.0, 2, 3],[4, 5, 6],[7, 8, 9]], requires_grad=True)
w = torch.tensor([[1.0, 2, 3],[4, 5, 6]], requires_grad=True)y = torch.matmul(x,w.T)
print(y)
print(torch.ones_like(y))
y.backward(gradient = torch.ones_like(y))
print(x.grad)
输出是
tensor([[ 14., 32.],[ 32., 77.],[ 50., 122.]], grad_fn=<MmBackward0>)
tensor([[1., 1.],[1., 1.],[1., 1.]])
tensor([[5., 7., 9.],[5., 7., 9.],[5., 7., 9.]])
Y = X W T [ y 11 y 21 y 12 y 22 y 13 y 23 ] = [ x 11 x 12 x 13 x 21 x 22 x 23 x 31 x 32 x 33 ] [ w 11 w 21 w 12 w 22 w 13 w 23 ] [ y 11 y 21 y 12 y 22 y 13 y 23 ] = [ ( x 11 w 11 + x 12 w 12 + x 13 w 13 ) ( x 11 w 21 + x 12 w 22 + x 13 w 23 ) ( x 21 w 11 + x 22 w 12 + x 23 w 13 ) ( x 21 w 21 + x 22 w 22 + x 23 w 23 ) ( x 31 w 11 + x 32 w 12 + x 33 w 13 ) ( x 31 w 21 + x 32 w 22 + x 33 w 23 ) ] Y = XW^T \\ \begin{bmatrix} y_{11} & y_{21} \\ y_{12} & y_{22} \\ y_{13} & y_{23} \\ \end{bmatrix} = \begin{bmatrix} x_{11} & x_{12} & x_{13} \\ x_{21} & x_{22} & x_{23} \\ x_{31} & x_{32} & x_{33} \\ \end{bmatrix} \begin{bmatrix} w_{11} & w_{21} \\ w_{12} & w_{22} \\ w_{13} & w_{23} \\ \end{bmatrix} \\ \begin{bmatrix} y_{11} & y_{21} \\ y_{12} & y_{22} \\ y_{13} & y_{23} \\ \end{bmatrix} = \begin{bmatrix} (x_{11}w_{11} + x_{12}w_{12} + x_{13}w_{13}) & (x_{11}w_{21} + x_{12}w_{22} + x_{13}w_{23}) \\ (x_{21}w_{11} + x_{22}w_{12} + x_{23}w_{13}) & (x_{21}w_{21} + x_{22}w_{22} + x_{23}w_{23}) \\ (x_{31}w_{11} + x_{32}w_{12} + x_{33}w_{13}) & (x_{31}w_{21} + x_{32}w_{22} + x_{33}w_{23}) \\ \end{bmatrix} Y=XWT y11y12y13y21y22y23 = x11x21x31x12x22x32x13x23x33 w11w12w13w21w22w23 y11y12y13y21y22y23 = (x11w11+x12w12+x13w13)(x21w11+x22w12+x23w13)(x31w11+x32w12+x33w13)(x11w21+x12w22+x13w23)(x21w21+x22w22+x23w23)(x31w21+x32w22+x33w23)
gradient=torch.ones_like(y)用于指定矩阵 Y Y Y中每一项的权重都为1,由矩阵 Y Y Y中元素加权得到的scalar函数为
f ( x , w ) = 1 × y 11 + 1 × y 12 + 1 × y 13 + 1 × y 21 + 1 × y 22 + 1 × y 23 , x = [ x 11 , x 12 , x 13 , x 21 , x 22 , x 23 , x 31 , x 32 , x 33 ] T w = [ w 11 , w 12 , w 13 , w 21 , w 22 , w 23 , w 31 , w 32 , w 33 ] T \begin{aligned} f(\mathrm{x},\mathrm{w}) & = 1\times y_{11}+1\times y_{12}+1\times y_{13}+1\times y_{21}+1\times y_{22}+1\times y_{23}, \\ & \mathrm{x} = [x_{11}, x_{12}, x_{13}, x_{21}, x_{22}, x_{23}, x_{31}, x_{32}, x_{33}]^T \\ & \mathrm{w} = [w_{11}, w_{12}, w_{13}, w_{21}, w_{22}, w_{23}, w_{31}, w_{32}, w_{33}]^T \end{aligned} f(x,w)=1×y11+1×y12+1×y13+1×y21+1×y22+1×y23,x=[x11,x12,x13,x21,x22,x23,x31,x32,x33]Tw=[w11,w12,w13,w21,w22,w23,w31,w32,w33]T
这里不包括复合求导,可以直接计算
∂ f ∂ x = [ ∂ f ∂ x 11 , ∂ f ∂ x 12 , ∂ f ∂ x 13 , ∂ f ∂ x 21 , ∂ f ∂ x 22 , ∂ f ∂ x 23 , ∂ f ∂ x 31 , ∂ f ∂ x 32 , ∂ f ∂ x 33 ] T ∂ f ∂ x = [ w 11 + w 21 , w 12 + w 22 , w 13 + w 23 , w 11 + w 21 , w 12 + w 22 , w 13 + w 23 , w 11 + w 21 , w 12 + w 22 , w 13 + w 23 ] T = [ 5 , 7 , 9 , 5 , 7 , 9 , 5 , 7 , 9 ] T \begin{aligned} \frac{\partial f}{\partial \mathrm{x}} & = \Big[\frac{\partial f}{\partial x_{11}}, \frac{\partial f}{\partial x_{12}}, \frac{\partial f}{\partial x_{13}}, \frac{\partial f}{\partial x_{21}}, \frac{\partial f}{\partial x_{22}}, \frac{\partial f}{\partial x_{23}}, \frac{\partial f}{\partial x_{31}}, \frac{\partial f}{\partial x_{32}}, \frac{\partial f}{\partial x_{33}} \Big]^T \\ \frac{\partial f}{\partial \mathrm{x}} & = \Big[ w_{11} + w_{21}, w_{12} + w_{22}, w_{13} + w_{23}, w_{11} + w_{21}, w_{12} + w_{22}, w_{13} + w_{23}, w_{11} + w_{21}, w_{12} + w_{22}, w_{13} + w_{23} \Big]^T \\ & = [5, 7, 9, 5, 7, 9, 5, 7, 9]^T \end{aligned} ∂x∂f∂x∂f=[∂x11∂f,∂x12∂f,∂x13∂f,∂x21∂f,∂x22∂f,∂x23∂f,∂x31∂f,∂x32∂f,∂x33∂f]T=[w11+w21,w12+w22,w13+w23,w11+w21,w12+w22,w13+w23,w11+w21,w12+w22,w13+w23]T=[5,7,9,5,7,9,5,7,9]T
再写成矩阵的形式则有
∂ f ∂ X = [ 5 7 9 5 7 9 5 7 9 ] \frac{\partial f}{\partial X} = \begin{bmatrix} 5 & 7 & 9 \\ 5 & 7 & 9 \\ 5 & 7 & 9 \\ \end{bmatrix} ∂X∂f= 555777999
再考虑一个更一般求二阶导的情况
x = torch.ones(3, requires_grad=True)
print(x)
y = x * 2
print(y)
z = y * 2
print(z)
v = torch.tensor([0.1, 1.0, 0.0001], dtype=torch.float)
z.backward(gradient=v)
print(x.grad)
结果如下
tensor([1., 1., 1.], requires_grad=True)
tensor([2., 2., 2.], grad_fn=<MulBackward0>)
tensor([4., 4., 4.], grad_fn=<MulBackward0>)
tensor([4.0000e-01, 4.0000e+00, 4.0000e-04])
其中
x = [ x 1 , x 2 , x 3 ] T = [ 1 , 1 , 1 ] T y = 2 x = [ y 1 , y 2 , y 3 ] T = [ 2 , 2 , 2 ] T z = 2 y = [ z 1 , z 2 , z 3 ] T = [ 4 , 4 , 4 ] T \begin{aligned} \mathrm{x} & = [x_1,x_2,x_3]^T = [1,1,1]^T \\ \mathrm{y} = 2\mathrm{x} & = [y_1,y_2,y_3]^T = [2,2,2]^T \\ \mathrm{z} = 2\mathrm{y} & = [z_1,z_2,z_3]^T = [4,4,4]^T \end{aligned} xy=2xz=2y=[x1,x2,x3]T=[1,1,1]T=[y1,y2,y3]T=[2,2,2]T=[z1,z2,z3]T=[4,4,4]T
若考虑gradient=torch.tensor([a1,a2,a3], dtype=torch.folat),那么最终加权得到的scalar函数为
f = a 1 z 1 + a 2 z 2 + a 3 z 3 f = a_1 z_1 + a_2 z_2 + a_3 z_3 f=a1z1+a2z2+a3z3
那么对 x \mathrm{x} x求偏导则有
∂ f ∂ x = ∂ y ∂ x ∂ f ∂ y = [ ∂ y 1 ∂ x 1 ∂ y 2 ∂ x 1 ∂ y 3 ∂ x 1 ∂ y 1 ∂ x 2 ∂ y 2 ∂ x 2 ∂ y 3 ∂ x 2 ∂ y 1 ∂ x 3 ∂ y 2 ∂ x 3 ∂ y 3 ∂ x 3 ] [ ∂ f ∂ y 1 ∂ f ∂ y 2 ∂ f ∂ y 3 ] = [ 2 2 2 ] [ 2 a 1 2 a 2 2 a 3 ] = [ 4 a 1 , 4 a 2 , 4 a 3 ] T \begin{aligned} \frac{\partial f}{\partial \mathrm{x}} & = \frac{\partial \mathrm{y}}{\partial \mathrm{x}} \frac{\partial f}{\partial \mathrm{y}} \\ & = \begin{bmatrix} \frac{\partial y_1}{\partial x_1} & \frac{\partial y_2}{\partial x_1} & \frac{\partial y_3}{\partial x_1} \\ \frac{\partial y_1}{\partial x_2} & \frac{\partial y_2}{\partial x_2} & \frac{\partial y_3}{\partial x_2} \\ \frac{\partial y_1}{\partial x_3} & \frac{\partial y_2}{\partial x_3} & \frac{\partial y_3}{\partial x_3} \\ \end{bmatrix} \begin{bmatrix} \frac{\partial f}{\partial y_1} \\ \frac{\partial f}{\partial y_2} \\ \frac{\partial f}{\partial y_3} \\ \end{bmatrix} \\ & = \begin{bmatrix} 2 & & \\ & 2 & \\ & & 2 \end{bmatrix} \begin{bmatrix} 2 a_1 \\ 2 a_2 \\ 2 a_3 \\ \end{bmatrix} \\ & = [4a_1, 4a_2, 4a_3]^T \end{aligned} ∂x∂f=∂x∂y∂y∂f= ∂x1∂y1∂x2∂y1∂x3∂y1∂x1∂y2∂x2∂y2∂x3∂y2∂x1∂y3∂x2∂y3∂x3∂y3 ∂y1∂f∂y2∂f∂y3∂f = 222 2a12a22a3 =[4a1,4a2,4a3]T
一些启示
Reference
参考教程1
参考教程2