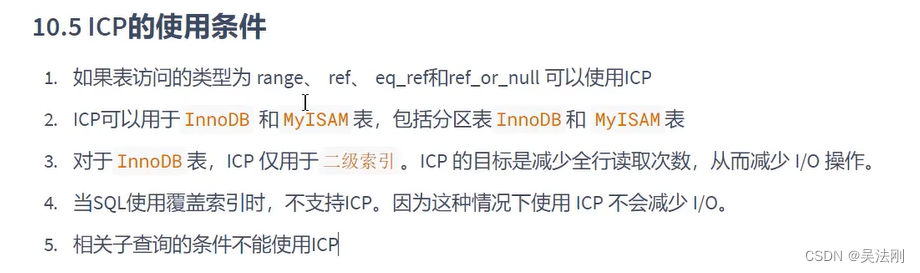
本章节介绍的静态地基激光扫描系统指的是那些在一个固定位置的位置上对周边场景地物特征进行扫描的设备。该类型设备的扫描测量机制是,通过激光测距仪进行斜距测量,与此同时通过水平和竖直两个方向上同步运动的角度编码器来记录角度变化值(如图3.1所示)。在大多数情况下,在扫描开始之前,用户可以设置两个方向的角度增量,包括方位角和垂直旋转角度步长。通常,角度步长设置为相同的值,以此保证扫描仪在以仪器为中心的极坐标系统的点云数据具有相等的空间采样。这些角度和距离的同步测量通常是确定的扫描模式,通过高度自动化的形式执行,测量频率能够达到1000Hz或更高。就像在第一章讨论的那昂,激光测距系统利用脉冲式和相位式两种测距方式。
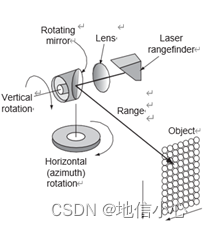
FIGURE 3.1
The range and the horizontal and vertical angular rotations that are measured toward objects in the terrain using a terrestrial laser scanner. (Drawn by M. Shand.)
然而在这个介绍性讨论当中,还存在一系列的短距离激光扫描仪,基于其他的扫描原理,其测距范围仅为数米,精度值可达到几分之一毫米。针对这些应用于超短距离、超高精度的扫描设备的原理及技术,在Blais(2004)的文献中有详细全面的回顾介绍。此类型设备广泛应用于计量、工业领域及逆向工程;应用在人体测量和医药研究领域;以及博物馆工作人员和考古学家对发掘物的测量和记录。这类设备的一个代表性例子是Konica Minolta VIVID 型号激光扫描仪,该系统基于光学三角测量技术(结构光测量),目标或物体被激光条纹扫描,其反射图像由数码相机同时记录。这种仪器的最大测量范围仅为2.5米。在本章节对这些超短距离激光扫描仪不做介绍, 因为本章节重点介绍的是地形测量和测绘应用。
3.2.1Overall Classification 总体分类
在已发表的关于静态地面或地面激光扫描仪的文献中广泛采用的主要分类是区分使用脉冲测距或飞行时间(TOF)测量原理的仪器和采用相位测量技术的仪器 - 如第1章所述。在静态地面激光扫描仪的特定背景下,可以说相位差法以非常高的速率和高精度产生一系列连续的距离测量,但仅限于几十米的距离。而基于脉冲的TOF方法允许测量数百米的更长距离,尽管与相位测量方法相比,速率要低得多,精度也略低(尽管完全可以接受)。在未来使用多脉冲技术将提高TOF方法的较低速率。然而,这种基于用于测距技术的简单分类没有考虑用于确保地面和地物覆盖所需要的的角度扫描动作。因此,必须进行二次分类,既要考虑扫描机制,也要考虑在地面上产生的模式或覆盖范围。

这里采用的分类是Staiger(2003)引入的分类,它区分了三种类型的静态地面或地面激光扫描仪 - (i)全景型扫描仪;(三) 混合扫描仪;以及(iii)相机型扫描仪(图3.2)。
- 在这三类中的第一类中,全景型扫描仪进行距离和角度测量,在水平面上提供完整的360°角度覆盖,激光扫描射束在垂直平面上通常至少覆盖180°,与水平面成直角,从而提供半球覆盖。然而,更大的270°或更大的垂直视场(FOV)并不少见,这意味着可以实现对仪器水平面以下地面的大量覆盖。事实上,在许多仪器上覆盖整个球体的唯一间隙或空隙是由扫描仪仪器的底座及其支撑三脚架产生的。虽然这种全景扫描模式在地形测绘中非常有用,但在测量复杂的工业设施、大型采石场和露天矿以及城市地区建筑物的外墙时,甚至在大厅、教堂、房间等室内,这种类型的扫描仪更可取,甚至是只能用这一类型设备。
- 属于第二类混合扫描仪的仪器是那些扫描动作不受限制的仪器,这些仪器围绕一个旋转轴 - 通常是仪器绕其垂直轴旋转产生的方位方向上的水平扫描运动。然而,围绕仪器水平轴的垂直角度扫描仰角移动受到限制,通常限制在50°–60°。这反映了为地形测绘目的而进行的中远程激光扫描中常见的情况,在这些扫描中,不需要像建筑物内那样以陡峭的角度测量头顶或陡峭角度的物体。
- 第三类的相机型扫描仪在更有限的角度范围内和相当特定的FOV内进行距离和角度测量。典型的可能是对周围环境的系统扫描 40°×40°角视场上的面积与摄影测量相机大致相同。
与机载激光扫描仪一样,可以根据静态地面激光扫描仪的使用范围或距离设想第三级或第三级分类。可以区分的第一组包括那些仅限于100米短距离的激光扫描仪,实际上有些激光扫描仪被限制在50-60米的距离内。它们主要包括那些采用相位测量原理的仪器,当然也有一些使用脉冲(TOF)测距原理的仪器应用在短距离测量上。通常,这些仪器的在测距范围上的限制会被它们非常高的精度优势所抵消——通常达到几毫米。第二组几乎完全基于使用TOF距离测量的脉冲测距,可以在中范围内测量最大值为150至350 m,精度略有降低。而第三个远程组,同样使用脉冲测距技术,可以测量更长的距离 - 在Optech ILRIS-3D仪器的情况下可达1公里或更长。然而,范围的增益通常伴随着测量距离精度和脉冲重复率的降低 - 尽管这仍然适合应用,并且对于这些仪器的用户来说是可接受的。
3.2.2Short-Range Laser Scanners 短距离激光扫描仪
上述两种主要测量原理——脉冲测距和相位测量——都用于那些在短距离内测量的地面激光扫描仪,通常最大范围为50至100米。可以看出,该组中包含的所有仪器都属于全景扫描仪类别。这使得它们既可以在建筑物内的室内使用,也可以在室外使用,其操作特性使其非常适合用于需要测量短距离和高垂直角度的城市地区的测量和制图。
3.2.2.1Short-Range Scanners Using Phase Measurement 使用相位测量方式的短距离扫描仪
这类扫描仪最著名的两家制造商是Zoller + Fröhlich(Z + F)和Faro,这两家公司都位于德国。第三家供应商是总部位于美国的Basis Software Inc.。
Z+F的Imager 5006型号地基激光扫描仪与之前的5003型号非常类似,都有一个伺服电机和一个角度编码器,二者围绕仪器的垂直轴作用于设备的水平面,驱动和记录方位角角度变化。通常安装在三脚架上,以便精确地设置在确定的地面标记位置上。在垂直方向上的扫描运动是通过一个轻质的、快速旋转镜实现的,该旋转镜安置在设备的两个水平耳轴之上,这两个水平耳轴由两个垂直方向上的支柱支撑。水平方向上的扫描方位角覆盖了360°,旋转棱镜在竖直方向上的扫描覆盖了310°,厂商宣称的水平和竖直方向上的角度精度达到了±0.007°,这相当于在 50 m距离上,垂直于激光方向的平面中两个方向的测量点的精度可以达到±6 mm。

FIGURE 3.3
The Z + F Imager 5003 phase-based high-speed laser scanner. (From Zoller + Fröhlich. With permission.)
垂直方向最大的扫描频率为50Hz,通常典型的运行频率是25赫兹。本系统使用的LARA激光测距仪采用的是Class 3R级别的连续波激光,波长为780nm的近红外激光。在早期的5003型号上,有两种版本,分别是25.2m和53.5m。当前的 Imager 5006 型号的最大射程为 79 m。制造商引用的距离精度在 25 m 的范围内为 ±6.5 mm。苏黎世联邦理工学院的Schulz 和Ingensand(2004)对Imager 5003的距离和角度测量精度进行了详细测量。扫描仪的测量范围和角度数据的处理是使用Z + F光形建模软件进行的。除了测量与地面物体的距离和角度外,Z + F成像仪扫描仪还可以测量从这些物体反射的信号强度。可以生成物体的灰度反射图像。数据存储在仪器的内部硬盘上,也可以通过以太网接口传输到笔记本电脑。用于操作仪器的集成控制面板位于仪器的一个垂直标准之一的侧面。该仪器也可以使用无线接口和连接从PDA远程控制。成像仪扫描仪每秒可提供超过 500000 个测量点,但在正常操作中,速率可能略低。

FIGURE 3.4
The Leica Geosystems HDS6000 laser scanner which has the same performance as the Z + F Imager 5006. (From Leica Geosystems.)
徕卡测量系统公司以HDS4500激光扫描仪的名字来销售Z+F imager 5003型设备。其中HDS是“高清测量”的首字母缩写。二者测距参数完全一致。与之类似的Z+F的5006型号设备与徕卡的HDS6000型号扫描仪相对应。
3.2.2.1.2Faro
总部位于北美的FARO公司,产品生产涉及范围包含便携式的基于计算机的测量设备,例如激光追踪仪、量规、测量机械臂等,这些产品广泛应用于工业领域。该公司的地基激光扫描仪是从IQvolution 公司的产品发展而来,IQvolution公司是一家德国斯图加特的公司,2005年FARO将其收购。IQvolution公司的激光扫描仪型号名称为IQsun 880,被FARO收购之后,该型号产品被重新命名为了LS 880,从那时开始,又有两款新型号的短距离扫描型号问世,分别是LS 420和LS840。这三个型号的设备的基础设计、构造以及操作都非常类似,除此之外,他们都采用了Class 3R的连续波测量技术。采用的都是波长785纳米的近红外半导体激光器。

FIGURE 3.5
The Faro LS 420 laser scanner that measures its ranges employing phase differences. (From Faro.)
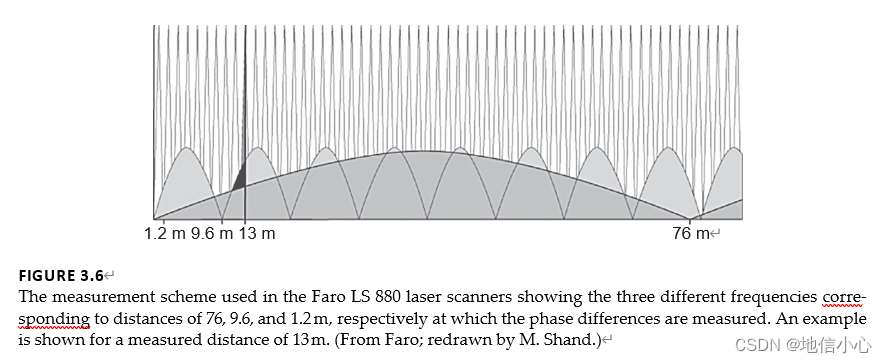
图3.5展示的LS420设备是三款型号当中最短测距的一款,最大测距只能达到20m,其激光发射功率为20mW。LS840和LS880设备的发射功率分别为10mW和20mW,测距分别可以达到40m和76m的距离。关于相位是测量技术,以LS880为例,输出的激光束被分割并调制振幅(Split and amplitude modulated),以三种不同的波长工作,分别为76、9.6和1.2m ,如图3.6所示。这允许根据其分辨率值将测量范围确定为 0.6 mm。在10 m的距离处,测量范围的声称精度为±3毫米。与TOF或脉冲测距方法相比,使用相位测量技术的明显优势是其测量速度。LS 880型号,激光测距仪可以以高达每秒120,000点的速度测量距离。
在所有三种型号中,激光测距仪都安装在水平面上,并与仪器的水平(耳轴)轴对齐。来自激光器的输出光束进入连续旋转镜(电机驱动)的中心,该镜子通过90°的固定角度使其偏转,以产生激光束的垂直轮廓扫描,在垂直平面上提供320°的角度覆盖。这使其属于全景扫描仪的类别。然后将从被测物体返回的每个反射信号与对应的输出信号进行比较,以测量相位差,从而确定测量范围。除此之外,击中物体的每个脉冲的返回信号强度也可以测量到9bit level。360° 方位角扫描使用电机实现,电机的电源来自 24 V DC 电池组。测量的范围、强度和角度数据可以直接记录在仪器的内部硬盘上,也可以通过以太网接口远程记录到外部笔记本电脑。测量数据的处理是使用Faro Scene软件进行的。2008年3月,在SPAR 2008大会上,Faro扫描器的不同型号的改进版本以“Photon”的名义推出,现在称为“Photon 20”和“Photon 80”。
3.2.2.1.3Basis Software Inc.
Basis软件公司位于Redmond,Washington。该公司用于测绘应用的主要激光扫描仪产品是Surphaser(如图3.7),这又是一款全景型扫描仪,该公司同样也新生产应用于工业的近距离测量激光扫描仪,本文此处不做介绍。Surphaser 有两种型号:最大范围为 22.5 m 的 25HS(半球扫描仪)和扩展范围为 38.5 m 的 25HSX。Surphaser仪器的基本设计和结构与上述Faro扫描仪有些相似,因为它们都采用了激光二极管测距仪,仪器的水平轴到位于电机驱动轴末端的连续旋转镜发射连续的激光辐射束。

FIGURE 3.7
The Surphaser 25HS laser scanner produced by Basis Software. (From Basis Software.)
FIGURE 3.8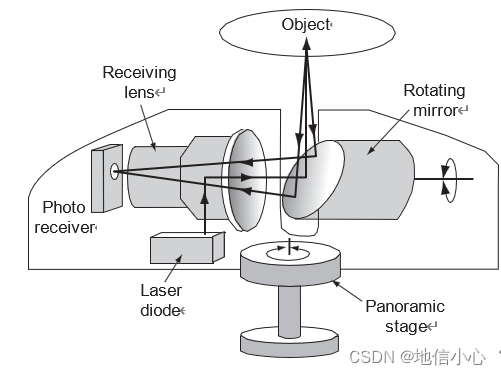
Diagram showing the design and the main features of the Surphaser laser scanner. (From Basis Software; redrawn by M. Shand.)
这种扫描机制将光束通过直角旋转,以在垂直平面上产生所需的扫描运动,从而提供 270° 的角度覆盖(图 3.8)。接收透镜将从被测物体返回的反射信号聚焦到充当接收器的光电二极管上,从而可以连续测量相位差和强度值。(The receiving lens focuses the reflected radiation from the object on to the photodiode that acts as the receiver allowing the continuous measurement of the phase differences and the intensity values.)
激光测距系统的最大测距速率是190000点每秒,但是实际应用中通常不会达到这么高。半导体激光二极管被用以15mW的能量发射可见光红光边缘的波长690nm的激光。水平面上的360°角度扫描是通过仪器上部的旋转实现的,该旋转由位于仪器下部(固定)部分的步进电机和齿轮箱以方位角驱动,可以安装到标准的Wild/Leica三脚架上。系统采用标准的18/24V直流电源。测量数据通过 FireWire 接口传输,记录在笔记本电脑上。
2007 年 11 月,Trimble 一款FX扫描仪,其实就是Basis software的Surphaser 的OEM版本,FX 扫描仪与 Trimble 的 FX 控制器软件结合使用,而 Trimble 的场景管理器软件用于定位扫描仪。测量数据可以在 Trimble 的 LASERGen 应用软件套件中使用。
3.2.2.2Short-Range Scanners Using Pulse Ranging
使用脉冲式测量技术的短距离扫描仪
采用脉冲式测量技术的短距离扫描仪厂商只有一个公司——Callidus,这是一家德国萨克森的公司。该公司采用基于TOF的脉冲测量技术开发短距离测量激光扫描仪。该公司自1996年开始就以此技术生产短距离激光扫描仪,最初,它的扫描仪仪器简称为Callidus 1.1。后来它被重新命名为Callidus 3D激光扫描仪,因此,该产品也被天宝公司销售。现在它被称为Callidus CP 3200扫描仪(图3.9a)。
此处应该指出的是,Callidus公司还制造了其他超短距离激光扫描仪,设计用于在室内(例如工厂或博物馆)的非常短的距离内测量相对较小的物体。这些设备有CT900和CT180等,这些设备采用的是激光三角测量的方法,被测物体从30cm到1.5m不等。因此这类产品在本文中不再进一步介绍,因为本文主要涉及的扫描仪主要是应用于地形扫描。CP3200型号设备是一款全景性扫描仪,能够提供水平方向360°的扫描(图3.9c),在水平面上通过伺服电机驱动,可以设置0.0625°到1°之间的不同扫描步长。竖直方向上的旋转扫描镜关联在一个角度编码器上,能够在竖直方向上进行280°的连续扫描(图3.9b)。角度步长间隔可在0.25度和1度之间选择,扫描频率可以达到77Hz。对于每个扫描步长位置,激光测距仪在垂直平面上测量适当的范围,CP3200扫描仪采用的半导体二极管激光器能够在905nm近红外波段上产生一个相当大的激光束(0.25°),可以根据不同的扫描物体选择不同的扫描范围从8m、32m到80m。仪器在50米范围内可达到的精度为±5毫米,水平和垂直角度分别为±0.005°和±0.009°。使用的典型测量速率为每秒 1750 点,但如果对每个点进行多次测量,该速率会降低。生成的数据使用Callidus自己的3D提取器软件进行处理。CP 3200还集成了软件控制的小画幅(768×576像素)CCD相机,具有可变焦距设置,可用于生成数字图像。Callidus 于 2007 年 9 月在莱比锡举行的 Intergeo 贸易展览会上推出了新的 CPW 8000 激光扫描仪(图 3.10)。该仪器结合了两种主要的测量方法——TOF脉冲测距和连续波相位测量。

该技术涉及使用脉冲测距方法进行基本的距离测量。然而,脉冲也以高频调制,这允许测量发射和接收脉冲之间的相位差。通过这种优雅的解决方案,无需尝试解决单相测量中固有的模糊性。取而代之的是,单相测量给出的距离的精细测量与脉冲测距测量给出的总距离值相结合,以提供高精度的最终范围值,在30 m的范围内±2 mm。最大的测量距离可达到80m。
685nm的红光波段的Class 3R激光被用于该激光测距系统。全景式扫描模式确保了完整的扫描范围,竖直方向上扫描范围可达到300°,最小的角度分辨率为0.002°。采用创新的双测量技术,可达到每秒钟50000点的测量速率,在两个方向上以0.02°的角度分辨率实现54分钟的扫描时间。
3.2.3Medium-Range Laser Scanners 中距离激光扫描仪
如上所述,这组扫描仪可以测量中等距离,最大值在150到350米之间。虽然大多数短程激光扫描仪制造商,如Faro,Callidus和Basic Software,对计量学有浓厚的兴趣,并且确实生产属于该领域的各种其他测量产品 - 但中程激光扫描仪制造商的情况却大不相同。在这一领域,这些扫描仪的几个主要系统供应商,如徕卡、Trimble和Topcon,是GPS接收器、全站仪和激光水平仪等测量仪器的主要制造商。这些公司制造和供应的中程地面激光扫描仪都基于脉冲测距技术。
Leica Geosystems
徕卡测量系统
徕卡进入地面或地面激光扫描仪领域是通过2001年1月收购Cyra Technologies Inc.公司实现的。此次收购与徕卡收购另一家相当独立且独立的美国公司Azimuth同时进行,这确保了其进入机载激光扫描领域 - 如第2章所述。Cyra公司最初于1993年在加利福尼亚州成立。它开发了Cyrax地面激光扫描仪器,最终于1998年进入市场。徕卡于2000年3月首次作为少数股东投资Cyra公司,一年后购买了该公司的其余股份。起初,Cyra公司保留了它的名字,作为徕卡测量系统的一个部门运营。然而,在2004年4月,它的名字正式改为徕卡测量系统HDS Inc.——HDS是“高清测量”的首字母缩写。由Cyra公司制造和销售的原始型号是Cyrax 2400。它的测距仪使用在光谱的绿色部分工作在l = 532 nm的2类半导体二极管激光器。这允许最大测量速度为每秒800点,最大范围为100米 - 尽管50米对于具有中等反射率的物体更真实。在 4 m 的距离内,规定的范围精度为 ±50 毫米。Cyrax 2400是一款相机型扫描仪,可以使用双镜光学扫描系统扫描40°×40°视场或窗口。扫描仪的主体位于一个简单的非电动平移和倾斜支架中,可以在方位角360°和垂直平面195°的角度范围内手动指向(图3.11)。 紧随其后的是改进的Cyrax 2500型号(后来称为Leica HDS2500),具有类似的规格(Sternberg 等人,2004)。Cyrax仪器随附了Cyclone软件。

2004年,流行的Cyrax型号被徕卡HDS3000取代,后者具有非常不同的设计。特别是以前的Cyrax仪器的相机式布局被双窗口设计所取代,该设计在方位角上提供360°的全全景覆盖,在垂直平面上提供270°的全全景覆盖。但是,这两个窗口不会同时使用;因此,可能需要两次单独的水平扫描来完成所需的覆盖范围,或者可以根据需要按顺序使用。HDS3000扫描仪使用伺服电机在垂直平面上旋转扫描镜和方位角驱动器,因此扫描速率比其Cyrax前代产品高得多。HDS3000中使用的测距仪基于3R类激光器,同样在规格的绿色部分(l = 532 nm)工作,最大工作范围为100 m,尽管可以实现高精度的正常操作范围为1至50 m。据称,在50米的范围内,测量距离的精度为±4毫米,而最大测量速率为每秒1800点。HDS3000扫描仪还安装了一台经过校准的高分辨率数字摄像机,该摄像机位于仪器内部。这生成的数字图像数据可以使用Cyclone软件叠加在扫描范围和角度数据上。
2006年,HDS3000被ScanStation取代(图3.12)。这保留了HDS3000全景型仪器的整体设计和构造。它的最大操作范围如何达到 300 m;最大测量速率为每秒4000点;并结合了许多附加功能,例如双轴补偿器,以允许使用该仪器进行常规测量操作,例如切除和横移。最近,在2007年7月,该系列的最新型号ScanStation 2问世。这具有与HDS3000和原始ScanStation相同的整体设计和外观。

ScanStation 2仪器具有新的激光测距仪和计时系统,使其能够以更高的速度进行距离测量 - 最大速率为每秒50000点 - 同时仍保持相同的最大范围300米,反射率为90%,与以前的ScanStation型号相同。最近(2007年),扫描站 2 仪器的生产已从加利福尼亚州圣拉蒙的工厂转移到瑞士海尔布鲁格的主要徕卡制造工厂。
3.2.3.1Trimble 天宝
Trimble 是测量仪器的另一家主要供应商,通过收购一家专门从事该领域的规模小得多的公司,进入了地面或地面激光扫描领域。2003 年 9 月,它通过收购位于法国丰特奈苏布瓦的 Mensi 公司来实现这一目标,该公司曾是激光测量技术的先驱开发商之一。该公司成立于1986年,设计和制造了许多短程激光扫描仪,特别是基于激光三角测量的S系列(包括S10和S25型号),主要用于工业设施内的计量应用。
2001年,Mensi公司推出了基于脉冲测距的GS 100仪器形式的远程激光扫描仪(图3.13)。这是混合型扫描仪的早期例子,使用轻型扫描镜在方位角上电动旋转360°,在垂直平面上旋转60°角。水平方向的角分辨率为0.0018°,垂直方向的角分辨率为0.0009°。GS 100 仪器还使用了基于波长在532 nm绿色波段的 2 类激光器的测距仪。用户可以控制激光聚焦,在50米处产生3毫米的非常小的光斑,以便进行非常精确的测量。或者,可以设置自动对焦模式,允许根据测量的距离自动重新聚焦激光光斑。该仪器每秒可测量多达 5000 个点,测量精度为 ±5 mm。数据处理是使用Mensi的RealWorks调查和内部开发的3Dipsos软件包进行的。
该系列的第二款型号称为GS 200(Kersten等人,2005)。它具有与GS 100相似的设计和角度覆盖范围,但使用了更复杂的接收器电路,使最大范围加倍至200米,并实现±2毫米的精度。它还具有一种Overscan技术,可以在最远350米的范围内捕获数据。此外,GS 200 与 GS100 一样,集成了经过校准的摄像机,具有变焦功能,安装在仪器内部。这产生了格式大小为 768 × 576 像素的彩色视频图像。视频图像可以镶嵌并覆盖在激光扫描仪产生的点云数据上。GS 200仪器也可以与GPS接收器或全站仪棱镜连接在一起,这些部件使用标准适配器安装在激光扫描仪的顶部。
该系列的最新型号是 Trimble GX 3D 扫描仪(图 3.14)。这些型号的规格与GS 200型号的规格非常相似 - 混合型结构,角度覆盖范围为360°×60°,测量速率为每秒5000点。但是该仪器经过重新设计,具有多重拍摄功能,以提高精度 - 绝对精度为±3至8毫米,具体取决于被测物体的范围和反射率。它还结合了零点指数误差的自动校准以及双轴补偿器,以纠正仪器的任何水平偏差。该装置还具有多边形扫描功能,允许装置的操作员定义一个不规则形状的盒子,仪器可以在这个范围内进行扫描和测量。该仪器还具有手持控制单元,可以远程操作。2007 年 10 月,Trimble 推出了采用 SureScan 技术的 GX Advanced 型号。这使用实时数据分析来“正则化(regularize)”被测量表面上的点密度。用户可以设置所需的网格间隔,算法会更改水平和垂直角度,以在测量表面上提供均匀的点密度。

自2007年3月以来,GX仪器的生产已从法国转移到位于瑞典首都斯德哥尔摩郊区丹德里德的前Spectra Precision工厂。Mechelke等人(2007)在论文中报告了采用TOF方法的最新Trimble GX和Leica ScanStation仪器与Z + F Imager 5006和使用相位测量技术的Faro LS 880扫描仪的比较测试。
3.2.3.2 Topcon 拓普康
另一家主要的测量仪器制造商Topcon宣布,它将在2008年初推出GLS1000型号进入地面激光扫描仪领域(图3.15)。已经发布的关于该仪器的初步信息是,除了方位角为360°的正常水平旋转外,它还将是一款垂直角度覆盖为70°的混合型仪器。该仪器基于脉冲的测距仪将配备1类激光,其对具有高反射率(90%)的物体的最大射程为330米,对具有低反射率(18%)的物体的最大射程为150米。最大测量速率引用为每秒 3000 点。GLS1000扫描仪将有一个集成的摄像头,并将在仪器侧面安装一个集成的控制面板。扫描仪测量的数据将记录存储卡上。
3.2.4 Long-Range Laser Scanners 长距离激光扫描仪
在这组激光扫描仪中,对高反射目标的最大测量范围已提高到500米以上;事实上,在某些情况下,它可以非常多。所有仪器都使用基于TOF测量原理的脉冲测距。其中两家主要供应商Optech和Riegl也是机载激光扫描仪的制造商,这些扫描仪的飞行高度与操作高度相似。

3.2.4.1Optech
Optech公司的产品包括激光测距和扫描设备,在许多不同的环境中运行 - 星载,机载和地面。在此背景下,智能激光测距成像系统(ILRIS)最初由Optech于1990年代后期为加拿大航天局(CSA)开发,作为用于机载航天器的组合测距和成像设备。在其原始形式中,作为ILRIS-100,它使用在规格的可见光(绿色)和红外部分工作的脉冲测距来扫描场景,并在高达500米的范围内同时生成距离,角度和强度数据。在处理后,这些数据被组合成一个范围和强度数据集,可以以灰度或颜色编码形式生成,大小为 2 k × 2 k 像素 (4 MB)。2000年6月,Optech推出了安装在三脚架上的ILRIS-3D版本的仪器(图3.16)。这是专门为地形和露天采矿应用开发的,另一方面是为工业应用,特别是工业厂房和设施的测量和建模而开发的。因此,该仪器的设计和制造从一开始就具有远程能力。使用1类激光测距仪在l = 1550 nm处发射红外线辐射,即使目标只有20%的反射率和350 m的射程,反射率非常低(4%)的目标,例如煤炭库存,它的最大射程为800 m,距离分辨率为1 cm。

使用两个内部偏转镜在40°×40°FOV上进行扫描时,可以达到每秒2000点的测量速率。测量数据写入闪存卡上,然后将其传输到PC进行后处理。红外接口允许使用掌上电脑进行设置和控制。ILRIS-3D仪器的主要外壳还包含一个小画幅数码相机,可提供640×480像素的图像。该相机还包括安装在仪器背面的LCD寻像器,可用于设置参数和显示捕获的数据。配件包括差分全球定位系统单元和姿态测量系统。2004年,大幅升级的ILRIS-3D仪器型号提供了更大的范围(超过1000 m到高反射目标);提高准确性;集成的基于CMOS的相机,可提供600万像素的图像;以及用于携带目的的集成手柄。如上所述,ILRIS-3D是一种相机型仪器,固定视场为40°×40°。为了覆盖更大的区域,Optech还推出了ILRIS-36D版本的仪器,其第一批样品于2005年5月发货。该仪器配备了电动平移和倾斜底座,使扫描仪能够覆盖 360° × 230° FOV(图 3.17)。为了实现这一点,电动基础单元以一系列由角度编码器测量的步骤移动ILRIS-3D的扫描仪单元,其视场为40°×40°。每个 40° × 40° 扫描面或窗口在其相邻面上重叠 5°。但是,在 2007 年 9 月,一项新的分析功能消除了使用多个扫描窗口进行这些重叠的需要。ILRIS-3D仪器仍在继续开发。2006 年 10 月,引入了两个新的可选功能。增强范围 (ER) 选项将范围进一步增加了 40%,用于露天采矿和大面积地形测量。

3.2.4.2Riegl
该公司制造了许多基于脉冲测距的远程激光扫描仪,这些扫描仪被命名为 LMS-Zxxx 系列。目前,该系列包括四种不同的型号——LMS-Z210ii、LMS-Z390i、LMS-Z420i 和 LMS-Z620,物体反射率为 80%时,最大测量范围分别为 650、400、1000 和 2000 m。它们都具有相似的设计特征。对于反射率较低的物体,四种仪器测量的范围要小得多——反射率值为 10% 时,分别为 200、100、350 和 650 m。制造商声称的距离测量精度为在50米距离上±4至15毫米。四个型号的 LMS-Zxxx 仪器都使用相同类型的激光发射系统,该系统具有连续旋转的多边形棱镜,该多边形棱镜放置在激光测距仪前面以产生基本的光学扫描——Riegl 的机载激光扫描系统也在使用。测距仪本身使用在光谱的近红外部分工作的 1 类激光器,波长为905 或 1550 nm。然而,对于地面系统,测距仪被放置在垂直位置朝上,而不是机载版本使用的水平位置(图3.18c)。脉冲通过旋转的光学多边形以适当的垂直角度指向地面及其物体。地面激光系统的垂直方向扫描角度范围为80°,通常为在水平面上方和下方提供±40°。对于所需的水平角旋转,仪器上部360° 旋转。这种 360° × 80° 的角度覆盖范围使仪器属于激光扫描仪的混合类别——如上文第 3.1.1 节中所定义。水平面内方位角的旋转步长(定义连续垂直扫描线之间的间隔)可以设置为不同的角间隔,例如,对于 LMS-Z420i 仪器,可以在 0.004° 和 0.075° 之间设置。使用这些 LMS-Zxxx 型号使用脉冲测距可以实现的最大测量速率在每秒 8,000 到 12,000 点之间,尽管在实际实践中通常会使用较低的速率。测量数据将通过仪器的内置以太网接口传输,并记录在笔记本电脑上。然后可以使用Riegl自己的RiSCAN Pro软件包进行处理。LMS-Zxxx 系列提供 GPS 同步选项,允许每组测量值都带有相对于 GPS 时间的时间戳。这允许将激光扫描仪与GPS/IMU系统集成,以提供动态扫描操作所需的位置和方向数据。
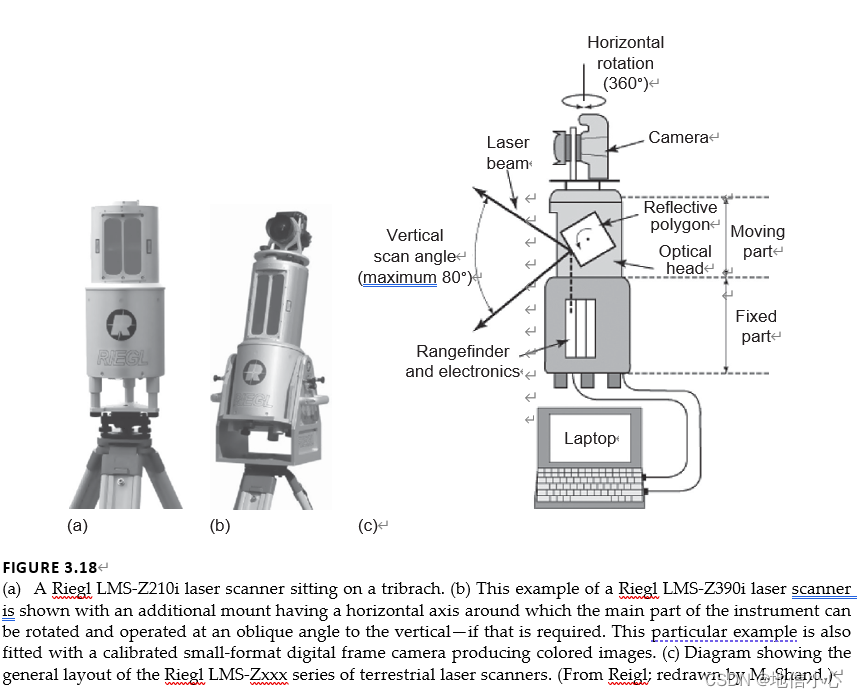
带有旋转光学多边形头的 Riegl 激光引擎可以安装在常规测量三棱柱,并使用三棱柱脚螺钉将其主轴设置为垂直位置(图 3.18a)。但是,这四个 LMS-Zxxx 型号都可以选择安装一个支架,带有两个垂直柱,可提供额外的旋转轴,使扫描仪引擎作为一个整体与垂直轴成斜角倾斜(图 3.18b)。各种型号还可以选装小画幅CCD数字帧相机,该相机位于主扫描仪引擎顶部的支架上(图3.18b和c)。目前,用户可以在尼康D70s或D100型号(提供6.1百万像素图像),D200型号(提供百万像素图像)或D300模型(提供12.3百万像素的图像)。如果需要更大画幅的图像,那么佳能EOS-1Ds Mark II相机及其16.7百万像素的帧图像作为替代方案。生成的彩色图像通过USB接口传输到笔记本电脑,在那里图像数据可以与激光扫描仪的点云融合。除了LMS-Zxxx系列扫描仪外,在过去的十年中,Riegl还制造了一系列远程激光轮廓测量系统。2008年,它推出了该系列的最新型号,称为LPM-321轮廓仪。这与LMS-Zxxx扫描仪的机械和光学设计非常不同,LMS-Zxxx扫描仪的激光测距仪单元安装在仪器的水平(耳轴)轴上,由单个支柱支撑(图3.19a)。

测距仪可以测量反射率为 80%的物体最大 6000 m 距离(不使用反射器),并且可以手动或自动模式测量轮廓。它还以与机载激光扫描仪相同的方式提供完整的波形数字化功能。在自动配接操作模式下,LPM-321 每秒可测量多达 1000 个点。该仪器有一个放大倍率高达 20´ 的瞄准望远镜,位于测距仪的顶部,并且可以在测距仪的侧面安装一个经过校准的数码相机(图 3.19b)。
3.2.4.3I-SiTE
I-SiTE公司成立于1999年,是位于南澳大利亚阿德莱德的Maptek公司的子公司。Maptek是Vulcan 3D地质建模软件的开发商,该软件广泛用于全球采矿业。I-SiTE公司是专门为支持和发展Maptek早期对激光扫描的兴趣和活动而成立的。用于地面激光扫描数据的I-SiTE Studio软件是该公司的早期产品,通常与Riegl地面激光扫描仪一起捆绑销售给用户。
然而,经过2或3年的发展,I-SiTE推出了自己的4400型激光扫描仪(图3.20)。这是一种混合型扫描仪,方位角为360°,垂直平面为80°角覆盖。所述角度精度为 ±0.04°。该仪器的测距仪基于 3R 类激光器,该激光器以 l = 905 nm 的功率发射脉冲,功率为 10 mW,并以每秒 4400 点的最大速率测量其范围。高反射表面的最大范围为 700 m。

当然,对于反射率为40%-50%的岩石和混凝土表面,该值会下降到600米,而在反射率为5%-10%的黑煤表面的情况下,该值将下降到150米。声称的射程精度在100米范围内为±5厘米。还可以测量和记录反射后返回信号的强度值。此外,I-SiTE 4400仪器还集成了一个数字全景线扫描仪,该扫描仪配备了尼康f = 20毫米镜头,可产生3700万像素的线图像,该图像在激光扫描/测距操作期间同时采集。测量数据通过以太网接口传输,记录在外部PC平板电脑上。使用I-SiTE Studio软件,校正后的图像会自动渲染到由范围和角度数据产生的3D表面上。该装置还配备了一个放大倍率为14×的观测望远镜,可用于对准和后视操作。该仪器的版本略有不同:(i) 4400LR 用于地形和露天采矿应用中遇到的较长范围;以及 (ii) 4400CR,用于警察和法医应用的近距离使用。
3.2.4.4Measurement Devices Ltd.
总部位于英国阿伯丁和约克,自1983年成立以来一直专门制造基于激光的测量系统。其产品包括用于林业、农业等的各种手持式激光测距仪;各种扇束激光系统,用于定位船舶并确保海上防撞;以及用于地下空腔和空隙内的激光扫描设备。在接近本章主题时,该公司还生产了采石场仪器,该仪器多年来已广泛用于世界各地的采石场和露天矿山,用于使用激光测距技术测量岩面的剖面。

该仪器的重新开发版本于2004年以LaserAce扫描仪的形式推出(图3.21),旨在以本节讨论的其他激光扫描仪的方式生成点云数据。LaserAce扫描器使用安装在仪器水平(耳轴)轴上的测距仪,由两个支柱或标准以经纬仪望远镜的方式支撑。测距仪利用 1 类半导体激光器在光谱的近红外部分以 l = 905 nm 发射其脉冲。这可以测量到中等反射目标的最大范围为700米,使用棱镜反射器测量最大范围为5公里,测量分辨率为1厘米,精度为±5厘米。该仪器可以使用安装在测距仪顶部的望远镜作为全站仪手动操作。或者,它可以使用其内置电机在自动(机器人)模式下作为激光扫描仪运行,在这种情况下,它可以以每秒 250 点的速度测量物体。使用水平和垂直角度编码器测量相应的角度。仪器提供的全角度覆盖范围为 360° × 135°。但是,操作员可以使用仪器的内置数字键盘通过事先对矩形或多边形的描述来测量特定区域。测量的范围和角度数据存储在标准的可互换闪存卡上。该仪器的定制版本面向MDL的传统采石和露天采矿市场,称为Quarryman Pro。这些仪器使用Psion PDA和Pocket PC计算机上的MDL记录器软件来记录测量数据,并使用公司的激光云查看器来处理数据。可以使用MDL的Face 3D建模器软件进行进一步处理以形成轮廓和截面以及计算体积。
3.2.4.5Trimble
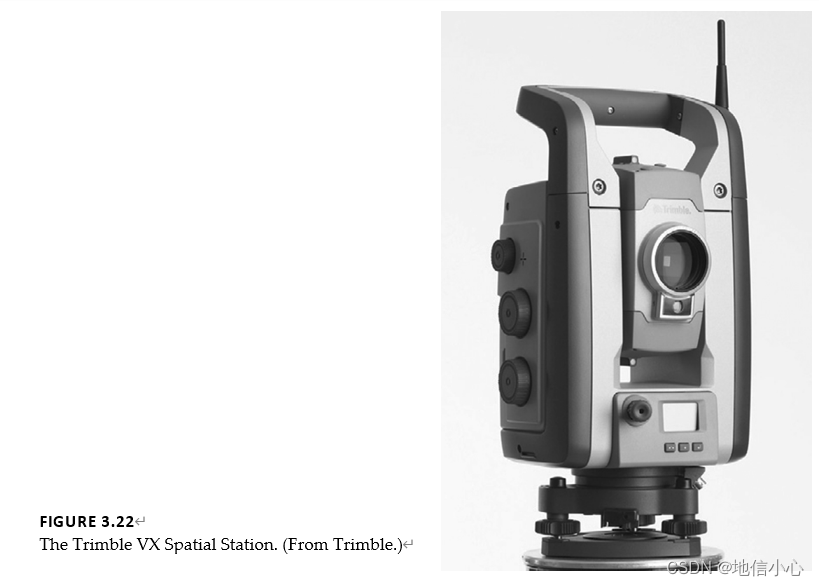
2007年6月,Trimble推出了VX空间站(图3.22)。该仪器的构造和运行概念与上文介绍到的该公司的GS和GX完全不同。 基本上,它可以被视为配备成像和扫描功能的自动(机器人)全站仪。该仪器配备了传统的测量员望远镜,而不是扫描镜。用于定位和横移的仪器的全站仪能力提供±1 s角精度和±3 mm距离精度,无棱镜的最大范围为300至800 m,单棱镜的最大范围为3 km。扫描以每秒 5-15 个测量点的速度进行,扫描范围可达 150 m。微型机载数码相机安装在望远镜的底部,其光轴与其平行。该校准摄像机可生成大小为 2048 × 1536 像素的 HDTV 图像,并且可以在仪器的可移动数据收集器单元上以最大 5 FPS 的速度以 JPEG 格式录制。显然,该仪器基本上是一个全站仪,旨在为测量员提供对有限区域或特定物体(如建筑物)的激光扫描和成像功能,而不是像 Trimble GS/GX 系列专门设计的那样对大面积或物体进行系统扫描。