算例路径: olaFlow\tutorials\baseWaveFlume
算例描述: 一个基础的二维波浪水槽
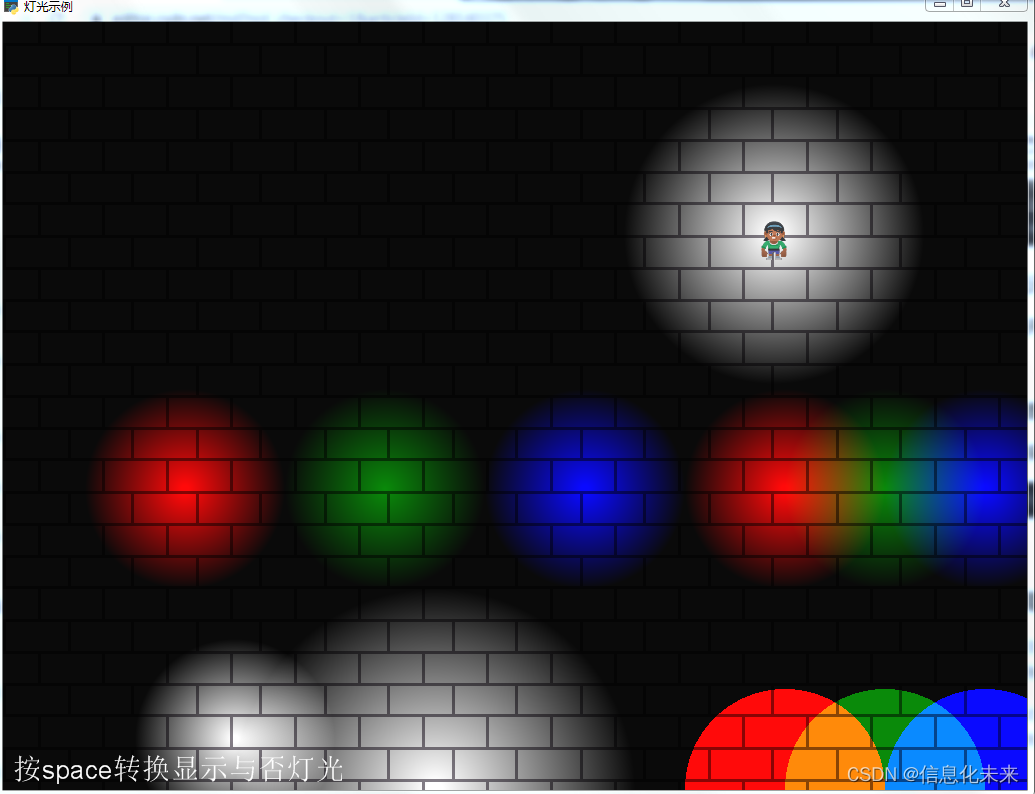
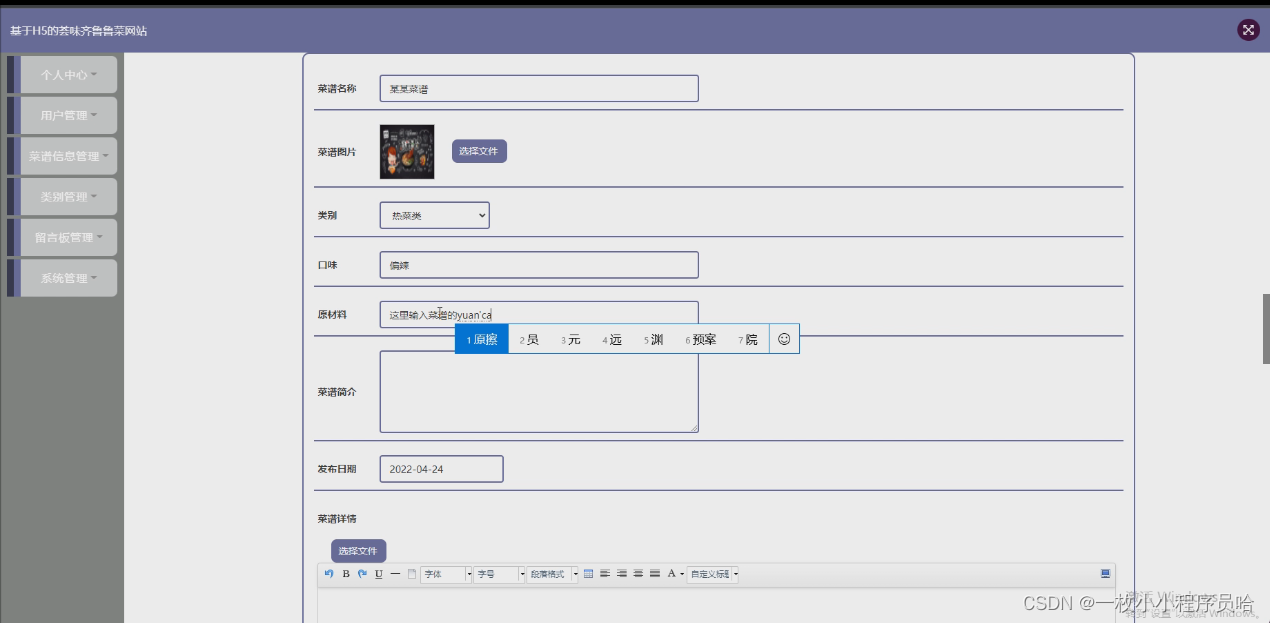
算例快照:


文件结构:
├── 0.org
│ ├── U
│ ├── alpha.water
│ ├── alpha.water.org
│ └── p_rgh
├── cleanCase
├── constant
│ ├── dynamicMeshDict
│ ├── g
│ ├── transportProperties
│ ├── turbulenceProperties
│ └── waveDict --> 设置波浪要素
├── runCase
└── system├── blockMeshDict├── controlDict├── decomposeParDict├── fvSchemes├── fvSolution└── setFieldsDict --> 设置水深
算例文件解析:
【0.org\U】
dimensions [0 1 -1 0 0 0 0]; // 量纲 m/s
internalField uniform (0 0 0); // 内部速度场 均一场 0 0 0
boundaryField //边界场
{inlet // 造波边界{type waveVelocity; // 波浪速度waveDictName waveDict; // 读取constant\waveDict中的波浪要素value uniform (0 0 0); //初值为 0 0 0}outlet // 消波边界{type waveAbsorption2DVelocity; // 使用了二维消波理论,olaFlow采用主动消波法value uniform (0 0 0);}bottom // 底部边界为固壁边界,边界上速度为零{type fixedValue; value uniform (0 0 0);}atmosphere // 大气边界,允许空气流出和流入{type pressureInletOutletVelocity;value uniform (0 0 0);}frontAndBack // 前后面,empty指示模型为二维模型{type empty;}
}
【0.org\p_rgh】
// p_rgh = p - rgh,实际压力减去静水压力
dimensions [1 -1 -2 0 0 0 0]; // M(1) L(-1) T(-2)
internalField uniform 0;
boundaryField
{frontAndBack{type empty;}outlet{type fixedFluxPressure; //将压力梯度设置为0,边界上的通量由速度边界条件指定value uniform 0;}inlet {type fixedFluxPressure;value uniform 0;}bottom{type fixedFluxPressure;value uniform 0;}atmosphere {type totalPressure; //总压条件:流出 p = p0; 流入 p = p0 - 0.5|U|^2U U;phi phi;rho rho;psi none;gamma 1;p0 uniform 0;value uniform 0;}
}
【0.org\alpha.water.org】
// 设置流体体积分数
dimensions [0 0 0 0 0 0 0];
internalField uniform 0;
boundaryField
{inlet{type waveAlpha; // 根据波浪条件设置waveDictName waveDict;value uniform 0;}frontAndBack{type empty;}outlet{type zeroGradient; // 零梯度}bottom{type zeroGradient;}atmosphere{type inletOutlet; // 当流体流出时,α的梯度为0;如果流入,α为0,100%的空气流入inletValue uniform 0;value uniform 0;}
}
【constant\dynamicMeshDict】
dynamicFvMesh staticFvMesh;
【constant\g】
dimensions [0 1 -2 0 0 0 0];
value ( 0 0 -9.81 );
【constant\transportProperties】
phases (water air);water
{transportModel Newtonian;nu [0 2 -1 0 0 0 0] 1e-06; // 流体运动粘度rho [1 -3 0 0 0 0 0] 1000; // 流体密度
}air
{transportModel Newtonian;nu [0 2 -1 0 0 0 0] 1.48e-05;rho [1 -3 0 0 0 0 0] 1;
}sigma [1 0 -2 0 0 0 0] 0.07; // 水和空气之间的表面张力参数
【constant\turbulenceProperties】
simulationType laminar; // 设置为层流模型
【constant\waveDict】
waveType regular; // 规则波
waveTheory cnoidal; // 椭圆余弦波
genAbs 1; // 考虑造波边界的消波性能 1/0
absDir 0.0; // 造波边界的消波方向
nPaddles 1; // 主动消波的Paddles数量设置
waveHeight 0.10; // 波高
wavePeriod 3; // 波周期
waveDir 0.0; // 波向
wavePhase 1.57079633; // 初始相位
// Change both entries to true to re-read this dictionary upon restart.
rereadAlpha false;
rereadU false;
【system\blockMeshDict】
scale 1;
vertices
((0.0 -0.02 0.0)(10.0 -0.02 0.0)(10.0 -0.02 0.7)(0.0 -0.02 0.7)(0.0 0.0 0.0)(10.0 0.0 0.0)(10.0 0.0 0.7)(0.0 0.0 0.7)
);
blocks
(hex (0 1 5 4 3 2 6 7) (500 1 70) simpleGrading (1 1 1)
);
edges
(
);
patches
(patch inlet // 造波边界((0 4 7 3))patch outlet // 消波边界 ((1 5 6 2))wall bottom // 水槽底部边界((0 1 5 4))patch atmosphere // 大气边界((3 2 6 7))empty frontAndBack // 水槽侧面边界((0 1 2 3)(4 5 6 7))
);
mergePatchPairs
(
);
【system\controlDict】
application olaFlow; // olaFlow求解器
startFrom latestTime;
startTime 0;
stopAt endTime;
endTime 60;
deltaT 0.001; // 计算时间步
writeControl adjustableRunTime;
writeInterval 0.05; // 写出时间步
purgeWrite 0;
writeFormat ascii;
writePrecision 6;
compression off; // 是否压缩格式写出,可节约硬盘空间, on/off
timeFormat general;
timePrecision 6;
runTimeModifiable yes;
adjustTimeStep yes; // 采用自适应时间步,可能会加速计算,也可能造成时间步极小
maxCo 0.5; // CFL条件的Courant数, 一般<1, 设置一个小值会使计算结果更精确,但也减小了时间步长,增加了计算成本
maxAlphaCo 0.5; // 两相交界面上的最大Courant数
maxDeltaT 0.025;
【system\decomposeParDict】
numberOfSubdomains 2; // 并行区域分解数目
method scotch; // 区域分解方法
...
【system\fvSchemes】
// 指定控制方程中各项的有限体积法的离散格式
ddtSchemes // 指定时间离散格式
{default Euler; // Euler法,一阶精度,条件稳定
} gradSchemes // 梯度项离散格式
{default Gauss linear; // 高斯定理,将网格中心的量插值到网格面上
}// olaFlow 的算例中给出了几乎所有可能出现的项,具体算例可能不会包含全部项
divSchemes // 对流项与散度项的离散格式, 将网格中心的量插值到网格面上,因此实际上选用的是interpolationSchemes
{div(rhoPhi,U) Gauss limitedLinearV 1; // Guass limitedLinear(一种TVD格式,使同时满足精度和有界) V类(采用限制器时考虑了流动方向)div(U) Gauss linear; // 二阶精度,无界div((rhoPhi|interpolate(porosity)),U) Gauss limitedLinearV 1;div(rhoPhiPor,UPor) Gauss limitedLinearV 1;div(rhoPhi,UPor) Gauss limitedLinearV 1;div(rhoPhiPor,U) Gauss limitedLinearV 1; div(phi,alpha) Gauss vanLeer; // Gauss vanLeer(一种TVD格式,使同时满足精度和有界)div(phirb,alpha) Gauss interfaceCompression; // 界面压缩格式,基于一般限制格式div((muEff*dev(T(grad(U))))) Gauss linear;div(phi,k) Gauss upwind; // 一阶迎风格式,有界div(phi,epsilon) Gauss upwind;div((phi|interpolate(porosity)),k) Gauss upwind;div((phi|interpolate(porosity)),epsilon) Gauss upwind;div(phi,omega) Gauss upwind;div((phi|interpolate(porosity)),omega) Gauss upwind;
}laplacianSchemes // 拉普拉斯项离散格式
{default Gauss linear corrected; // Guass线性插值,corrected(显式的非正交网格修正)
}interpolationSchemes
{default linear; // 线性插值格式
}snGradSchemes // 面法向梯度格式
{default corrected;
}fluxRequired //
{default no;p_rgh;pcorr;alpha.water;
}
【system\fvSolution】
// 指定方程组矩阵求解器、残差以及其他算法控制
solvers
{"alpha.water.*"{nAlphaCorr 1; //nAlphaSubCycles 2;alphaOuterCorrectors yes;cAlpha 1;MULESCorr no;nLimiterIter 3;solver smoothSolver; // 求解器:光顺求解器。对称和非对称矩阵均适用smoother symGaussSeidel; // 光顺器:对称Gauss-Seidel方法tolerance 1e-8; // 标准化残差relTol 0; // 相对残差,表征残差的递减量}"pcorr.*" // 压强校正量{solver PCG; // 求解器:预处理共轭梯度法。仅适用于对称矩阵 preconditioner DIC; // 预处理器:基于对角的不完全Cholesky预处理器tolerance 1e-5;relTol 0;}p_rgh{solver PCG;preconditioner DIC;tolerance 1e-07;relTol 0.05;}p_rghFinal // 在求解p_rgh时可设置较大的残差,在最后一步设置严格的误差{$p_rgh;relTol 0;}U{solver smoothSolver; smoother symGaussSeidel;tolerance 1e-06;relTol 0;}
}// 离散方程组的分离式解法
PIMPLE // SIMPLE 与 PISO 算法的耦合
{momentumPredictor no;nOuterCorrectors 1; // 值不大于1时,算法变为纯PISO算法;若大于1,为非定常SIMPLE算法nCorrectors 3;nNonOrthogonalCorrectors 0;
}relaxationFactors // 松弛方法,为降低数值波动
{fields // 表示需要使用松弛方法(显式)的变量{}equations // 表示需要使用松弛方法(隐式)的方程{".*" 1;}
}
【system\setFieldsDict】
defaultFieldValues
(volScalarFieldValue alpha.water 0 // 初始化流体体积分数
);
regions
(boxToCell{box (-10 -1 -1) (30 1 0.4);fieldValues(volScalarFieldValue alpha.water 1 // 将box范围内的流体设置为a = 1的相,即水深);}
);