系列文章目录:
-
Turbot4机器人入门教程-硬件清单
-
Turbot4机器人入门教程-软件清单
-
Turbot4机器人入门教程-NoMachine远程控制
-
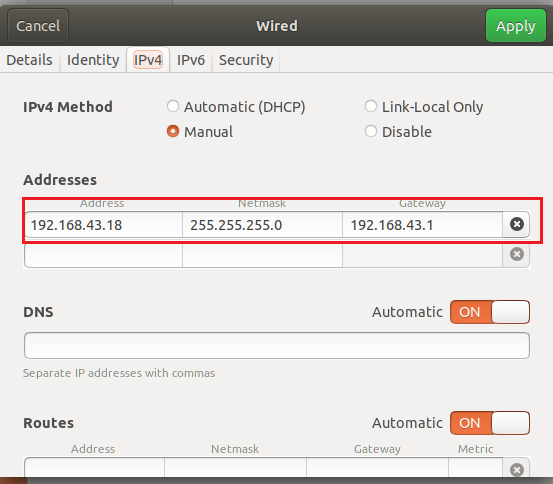
Turbot4机器人入门教程-配置网络
-
Turbot4机器人入门教程-测试键盘
-
Turbot4机器人入门教程-测试相机
-
Turbot4机器人入门教程-测试IMU
-
Turbot4机器人入门教程-测试雷达
-
Turbot4机器人入门教程-测试里程
-
Turbot4机器人入门教程-查看TF树和机器人模型
-
Turbot4机器人入门教程-slam_toolbox算法同步建图
-
Turbot4机器人入门教程-slam_toolbox算法异步建图
-
Turbot4机器人入门教程-cartographer算法建图
-
Turbot4机器人入门教程-gmapping算法建图
-
Turbot4机器人入门教程-单点导航
-
Turbot4机器人入门教程-融合建图和导航
-
Turbot4机器人入门教程-多点导航
-
Turbot4机器人入门教程-视觉转激光建图-gmaping算法建图
-
Turbot4机器人入门教程-视觉转激光建图-slam_toolbox算法同步建图
-
Turbot4机器人入门教程-视觉转激光建图-slam_toolbox算法异步建图
-
Turbot4机器人入门教程-视觉转激光建图-cartographer算法建图
-
Turbot4机器人入门教程-rosbag包的录制和回放
-
Turbot4机器人入门教程-离线建图-slam_toolbox算法同步建图
-
Turbot4机器人入门教程-离线建图-slam_toolbox算法异步建图
-
Turbot4机器人入门教程-离线建图-cartographer算法建图
-
Turbot4机器人入门教程-离线建图-gmaping算法建图
-
Turbot4机器人入门教程-使用统一建图入口
-
Turbot4机器人入门教程-测试-直行1米测试线速度
-
Turbot4机器人入门教程-测试-旋转360度测试角速度
-
Turbot4机器人入门教程-应用-查看图像话题
-
Turbot4机器人入门教程-应用-实现拍照功能
-
Turbot4机器人入门教程-应用-实现录像功能
-
Turbot4机器人入门教程-应用-读取图片文件并发布图像话题
说明:
- 本教程主要介绍Turtbot4 Lite的产品特征
相关设备:
- Turbot4机器人套件:采购地址
硬件清单:
-
1 x TurtleBot 4 Lite
-
1 x X86架构的上位机NUC
-
1 x 12000毫安电池 + 电池充电器
-
1 x 外部四口USB HUB
-
1 x 升压模块
续航:
-
12000毫安电池,续航3个小时。
-
TurtleBot 4 Lite底盘电池,续航7个小时。电池低于30%,需要充电
Turbot4产品图:

TurtleBot 4 Lite
- 产品图:

-
TurtleBot 4 Lite是TurtleBot 4的简化版本。它只有导航、地图绘制和 AI 应用程序所需的组件 -
TurtleBot 4 Lite跟TurtleBot 4具有相同的 Raspberry Pi 4B,其位于Create® 3的后侧的抽屉上,以及相同的RPLIDAR A1M8雷达。TurtleBot 4 Lite上的摄像头是OAK-D-Lite
硬件规格
- 对比表格
| Feature | TurtleBot 4 Lite | TurtleBot 4 |
|---|---|---|
| Size (L x W x H) | 342 x 339 x 192 mm | 342 x 339 x 351 mm |
| Weight | 3270 g | 3945 g |
| Base platform | iRobot® Create® 3 | iRobot® Create® 3 |
| Wheels (Diameter) | 72 mm | 72 mm |
| Ground Clearance | 4.5 mm | 4.5 mm |
| On-board Computer | Raspberry Pi 4B 4GB | Raspberry Pi 4B 4GB |
| Maximum linear velocity | 0.31 m/s in safe mode, 0.46 m/s without safe mode | 0.31 m/s in safe mode, 0.46 m/s without safe mode |
| Maximum angular velocity | 1.90 rad/s | 1.90 rad/s |
| Maximum payload | 9 kg | 9 kg |
| Operation time | 2h 30m - 4h depending on load | 2h 30m - 4h depending on load |
| Charging time | 2h 30m | 2h 30m |
| Bluetooth Controller | Not Included | TurtleBot 4 Controller |
| Lidar | RPLIDAR A1M8 | RPLIDAR A1M8 |
| Camera | OAK-D-Lite | OAK-D-Pro |
| User Power | VBAT @1.9A 5V @ Low current 3.3V @ Low current | VBAT @ 300 mA 12V @ 300 mA 5V @ 500 mA 3.3v @ 250 mA |
| USB Expansion | USB 2.0 (Type A) x2 USB 3.0 (Type A) x2 | USB 2.0 (Type A) x2 USB 3.0 (Type A) x1 USB 3.0 (Type C) x4 |
| Programmable LEDs | Create® 3 Lightring | Create® 3 Lightring User LED x2 |
| Status LEDs | - | Power LED Motors LED WiFi LED Comms LED Battery LED |
| Buttons and Switches | Create® 3 User buttons x2 Create® 3 Power Button x1 | Create® 3 User buttons x2 Create® 3 Power Button x1 User Buttons x4 |
| Battery | 26 Wh Lithium Ion (14.4V nominal) | 26 Wh Lithium Ion (14.4V nominal) |
| Charging Dock | Included | Included |
传感器
- RPLIDAR A1M8

-
RPLIDAR A1M8是一款360度激光测距扫描仪,扫描距离为12m。其用于生成机器人周围环境的2D平面扫描。TurtleBot 4和TurtleBot 4 Lite都使用此传感器,更多相关信息,请参阅官方文档 -
OAK-D-Lite
Luxonis的OAK-D-Lite相机使用4K IMX214色彩传感器和一对OV7251立体传感器来生成高质量的色彩和深度图像- 板载
Myriad X VPU使相机能够运行计算机视觉应用程序、对象跟踪和运行AI模型。更多相关信息,请访问 Luxonis 文档