一、概念介绍
参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。
作用:存储一些多节点共享的数据,类似于全局变量。
二、理论模型[Autolabor-ROS]
参数服务器实现是最为简单的,该模型如下图所示,该模型中涉及到三个角色:
ROS Master (管理者)
Talker (参数设置者)
Listener (参数调用者)
ROS Master 作为一个公共容器保存参数,Talker 可以向容器中设置参数,Listener 可以获取参数。
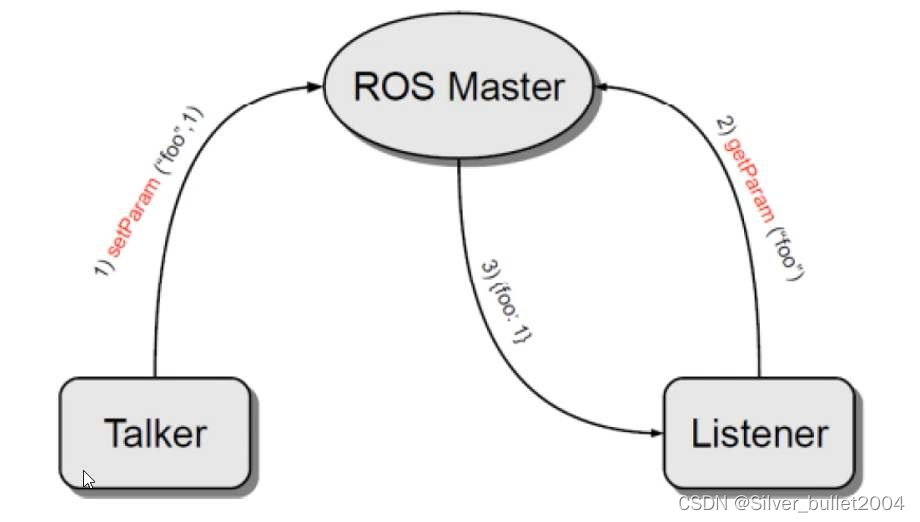
整个流程由以下步骤实现:
1.Talker 设置参数
Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
2.Listener 获取参数
Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
3.ROS Master 向 Listener 发送参数值
ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
注意:参数服务器不是为高性能而设计的,因此最好用于存储静态的非二进制的简单数据
三、参数操作(C++)
在 C++ 中实现参数服务器数据的增删改查,均可以通过两套 API 实现:
ros::NodeHandle
ros::param
下面为具体操作演示:
1.参数服务器新增(修改)参数 【增、改】
/*参数服务器操作之新增与修改(二者API一样)_C++实现:在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandlesetParam("键",值)ros::paramset("键","值")示例:分别设置整形、浮点、字符串、bool、列表、字典等类型参数修改(相同的键,不同的值)*/
#include "ros/ros.h"int main(int argc, char *argv[])
{ros::init(argc,argv,"set_update_param");std::vector<std::string> stus;stus.push_back("zhangsan");stus.push_back("李四");stus.push_back("王五");stus.push_back("孙大脑袋");std::map<std::string,std::string> friends;friends["guo"] = "huang";friends["yuang"] = "xiao";//NodeHandle--------------------------------------------------------ros::NodeHandle nh;nh.setParam("nh_int",10); //整型nh.setParam("nh_double",3.14); //浮点型nh.setParam("nh_bool",true); //boolnh.setParam("nh_string","hello NodeHandle"); //字符串nh.setParam("nh_vector",stus); // vectornh.setParam("nh_map",friends); // map//修改演示(相同的键,不同的值)nh.setParam("nh_int",10000);//param--------------------------------------------------------ros::param::set("param_int",20);ros::param::set("param_double",3.14);ros::param::set("param_string","Hello Param");ros::param::set("param_bool",false);ros::param::set("param_vector",stus);ros::param::set("param_map",friends);//修改演示(相同的键,不同的值)ros::param::set("param_int",20000);return 0;
}
2.参数服务器获取参数 【查】
/*参数服务器操作之查询_C++实现:在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandleparam(键,默认值)存在,返回对应结果,否则返回默认值getParam(键,存储结果的变量)存在,返回 true,且将值赋值给参数2若果键不存在,那么返回值为 false,且不为参数2赋值getParamCached(键,存储结果的变量)--提高变量获取效率存在,返回 true,且将值赋值给参数2若果键不存在,那么返回值为 false,且不为参数2赋值getParamNames(std::vector<std::string>)获取所有的键,并存储在参数 vector 中hasParam(键)是否包含某个键,存在返回 true,否则返回 falsesearchParam(参数1,参数2)搜索键,参数1是被搜索的键,参数2存储搜索结果的变量ros::param ----- 与 NodeHandle 类似
*/#include "ros/ros.h"int main(int argc, char *argv[])
{setlocale(LC_ALL,"");ros::init(argc,argv,"get_param");//NodeHandle实现--------------------------------------------------------/*ros::NodeHandle nh;// 1.param 函数int res1 = nh.param("nh_int",100); // 键存在int res2 = nh.param("nh_int2",100); // 键不存在ROS_INFO("param获取结果:%d,%d",res1,res2);// 2.getParam 函数int nh_int_value;double nh_double_value;bool nh_bool_value;std::string nh_string_value;std::vector<std::string> stus;std::map<std::string, std::string> friends;nh.getParam("nh_int",nh_int_value);nh.getParam("nh_double",nh_double_value);nh.getParam("nh_bool",nh_bool_value);nh.getParam("nh_string",nh_string_value);nh.getParam("nh_vector",stus);nh.getParam("nh_map",friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",nh_int_value,nh_double_value,nh_string_value.c_str(),nh_bool_value);for (auto &&stu : stus){ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// getParamCached()nh.getParamCached("nh_int",nh_int_value);ROS_INFO("通过缓存获取数据:%d",nh_int_value);//getParamNames()std::vector<std::string> param_names1;nh.getParamNames(param_names1);for (auto &&name : param_names1){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 nh_int 吗? %d",nh.hasParam("nh_int"));ROS_INFO("存在 nh_intttt 吗? %d",nh.hasParam("nh_intttt"));std::string key;nh.searchParam("nh_int",key);ROS_INFO("搜索键:%s",key.c_str());*///param实现--------------------------------------------------------ROS_INFO("++++++++++++++++++++++++++++++++++++++++");int res3 = ros::param::param("param_int",20); //存在int res4 = ros::param::param("param_int2",20); // 不存在返回默认ROS_INFO("param获取结果:%d,%d",res3,res4);// getParam 函数int param_int_value;double param_double_value;bool param_bool_value;std::string param_string_value;std::vector<std::string> param_stus;std::map<std::string, std::string> param_friends;ros::param::get("param_int",param_int_value);ros::param::get("param_double",param_double_value);ros::param::get("param_bool",param_bool_value);ros::param::get("param_string",param_string_value);ros::param::get("param_vector",param_stus);ros::param::get("param_map",param_friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",param_int_value,param_double_value,param_string_value.c_str(),param_bool_value);for (auto &&stu : param_stus) // &&右值引用{ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : param_friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// getParamCached()ros::param::getCached("param_int",param_int_value);ROS_INFO("通过缓存获取数据:%d",param_int_value);//getParamNames()std::vector<std::string> param_names2;ros::param::getParamNames(param_names2);for (auto &&name : param_names2){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 param_int 吗? %d",ros::param::has("param_int"));ROS_INFO("存在 param_intttt 吗? %d",ros::param::has("param_intttt"));std::string key;ros::param::search("param_int",key);ROS_INFO("搜索键:%s",key.c_str());return 0;
}
3.参数服务器删除参数 【删】
/* 参数服务器操作之删除_C++实现:ros::NodeHandledeleteParam("键")根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 falseros::paramdel("键")根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false*/
#include "ros/ros.h"int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");ros::init(argc,argv,"delete_param");ros::NodeHandle nh;bool r1 = nh.deleteParam("nh_int");ROS_INFO("nh 删除结果:%d",r1);bool r2 = ros::param::del("param_int");ROS_INFO("param 删除结果:%d",r2);return 0;
}
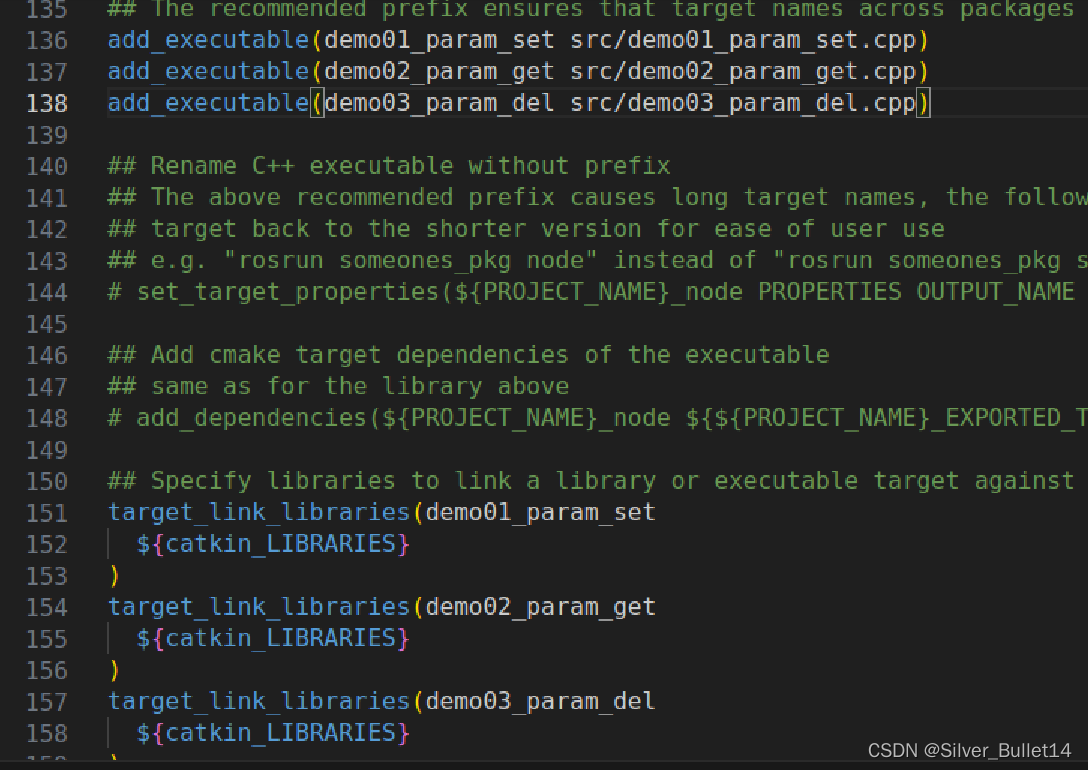
4.配置CMakeList.txt
add_executable(demo01_param_set src/demo01_param_set.cpp)
add_executable(demo02_param_get src/demo02_param_get.cpp)
add_executable(demo03_param_del src/demo03_param_del.cpp)target_link_libraries(demo01_param_set${catkin_LIBRARIES}
)
target_link_libraries(demo02_param_get${catkin_LIBRARIES}
)
target_link_libraries(demo03_param_del${catkin_LIBRARIES}
)
之后编译运行即可,参数服务器相较于之前两个通信机制还是比较简洁的。。。