在我之前的一篇文章中有过生猪检测盒状态识别相关的项目实践,如下:
《Python基于yolov4实现生猪检测及状态识》
感兴趣的话可以自行移步阅读,这里主要是基于同样的技术思想,将原始体积较大的yolov4模型做无缝替换,使用当下比较优秀的轻量级yolov5s模型来实现目标检测,后续基于状态识别模型实现生猪状态的识别,首先看下效果图,如下所示:
简单看下数据集:
YOLO格式标注文件如下所示:

实例标注内容如下所示:
0 0.062744 0.558594 0.046387 0.16276
0 0.077637 0.701497 0.0625 0.126953
0 0.107422 0.805664 0.053711 0.087891
0 0.129883 0.798503 0.063477 0.138672
0 0.151367 0.811198 0.073242 0.123698
0 0.22876 0.842773 0.085449 0.115234
0 0.283936 0.794922 0.066895 0.227865
0 0.333496 0.773438 0.06543 0.197917
0 0.362793 0.812826 0.078125 0.166016
0 0.394043 0.848958 0.108398 0.167969
0 0.468994 0.878255 0.131348 0.105469
0 0.720459 0.733398 0.068848 0.19987
0 0.86499 0.628255 0.096191 0.091146
0 0.922607 0.434245 0.040527 0.164062
0 0.87915 0.301107 0.046387 0.146484
0 0.907715 0.297852 0.035156 0.120443
0 0.870117 0.166992 0.047852 0.108724
0 0.829102 0.145182 0.058594 0.097656
0 0.79126 0.264974 0.112793 0.135417
0 0.684326 0.127279 0.104004 0.078776
0 0.668213 0.068685 0.10498 0.064453
0 0.616699 0.142578 0.104492 0.174479
0 0.49292 0.151042 0.162598 0.098958
0 0.437256 0.417643 0.202637 0.212891
0 0.387207 0.329753 0.104492 0.210286
0 0.300049 0.403971 0.069824 0.222005
0 0.195312 0.514974 0.12207 0.227865
0 0.222168 0.451497 0.092773 0.133464
VOC格式标注文件如下所示:
实例标注数据如下所示:
<annotation><folder>DATASET</folder><filename>images/20190621141536.jpg</filename><source><database>The DATASET Database</database><annotation>DATASET</annotation><image>DATASET</image></source><owner><name>YMGZS</name></owner> <size><width>2048</width><height>1536</height><depth>3</depth></size><segmented>0</segmented><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>775</xmin><ymin>1268</ymin><xmax>1072</xmax><ymax>1406</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>507</xmin><ymin>1279</ymin><xmax>785</xmax><ymax>1434</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>464</xmin><ymin>1130</ymin><xmax>728</xmax><ymax>1333</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>361</xmin><ymin>1197</ymin><xmax>507</xmax><ymax>1366</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>226</xmin><ymin>1164</ymin><xmax>399</xmax><ymax>1302</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>161</xmin><ymin>1171</ymin><xmax>321</xmax><ymax>1311</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>168</xmin><ymin>1025</ymin><xmax>314</xmax><ymax>1175</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>104</xmin><ymin>973</ymin><xmax>185</xmax><ymax>1161</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>87</xmin><ymin>754</ymin><xmax>166</xmax><ymax>987</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>68</xmin><ymin>641</ymin><xmax>178</xmax><ymax>736</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>70</xmin><ymin>580</ymin><xmax>179</xmax><ymax>656</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>71</xmin><ymin>425</ymin><xmax>218</xmax><ymax>592</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>266</xmin><ymin>335</ymin><xmax>487</xmax><ymax>440</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>464</xmin><ymin>321</ymin><xmax>673</xmax><ymax>454</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>530</xmin><ymin>508</ymin><xmax>768</xmax><ymax>717</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>709</xmin><ymin>521</ymin><xmax>909</xmax><ymax>847</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>787</xmin><ymin>209</ymin><xmax>1011</xmax><ymax>549</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>949</xmin><ymin>64</ymin><xmax>1261</xmax><ymax>233</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1045</xmin><ymin>237</ymin><xmax>1387</xmax><ymax>387</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1254</xmin><ymin>66</ymin><xmax>1476</xmax><ymax>218</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1295</xmin><ymin>135</ymin><xmax>1495</xmax><ymax>235</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1480</xmin><ymin>104</ymin><xmax>1661</xmax><ymax>197</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1649</xmin><ymin>142</ymin><xmax>1740</xmax><ymax>264</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1772</xmin><ymin>341</ymin><xmax>1891</xmax><ymax>560</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1828</xmin><ymin>553</ymin><xmax>1933</xmax><ymax>772</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1810</xmin><ymin>782</ymin><xmax>1939</xmax><ymax>977</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1364</xmin><ymin>902</ymin><xmax>1576</xmax><ymax>1216</ymax></bndbox></object><object> <name>pig</name><pose>Unspecified</pose><truncated>0</truncated><difficult>0</difficult><bndbox><xmin>1342</xmin><ymin>1016</ymin><xmax>1514</xmax><ymax>1247</ymax></bndbox></object></annotation>默认使用轻量级的yolov5s模型来进行模型的开发,默认训练100次epoch,结果详情如下所示:
【F1值曲线】

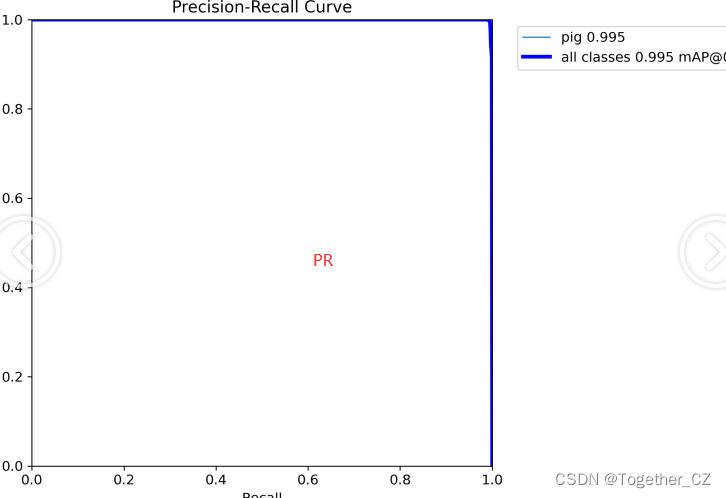
【PR曲线】
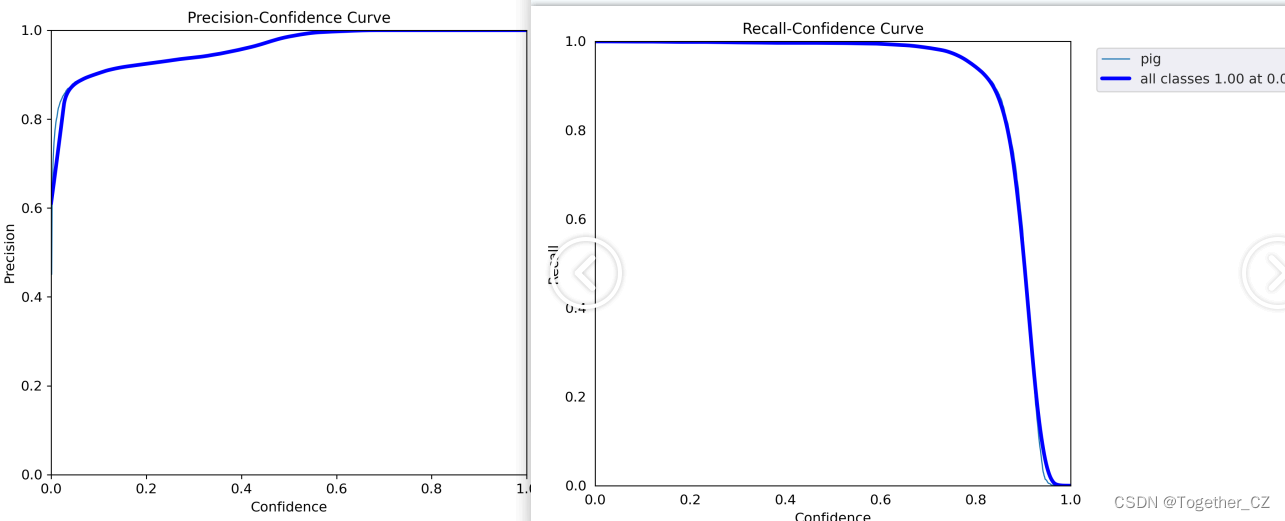
【Precision和Recall曲线】
数据可视化:

Batch计算实例:

可视化界面推理实例如下:
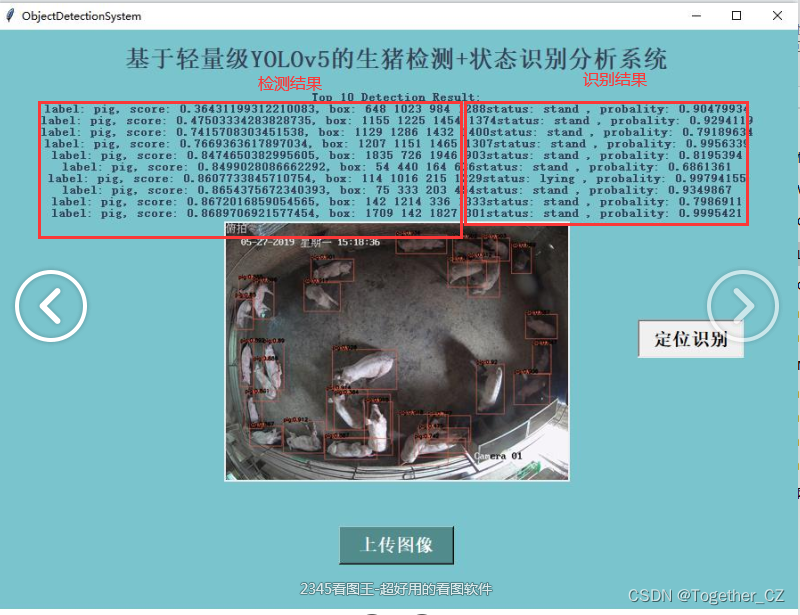
目标检测+状态识别在界面中做了集成实现。