摘 要
为了能快速、有效地识别视频中的车辆信息,文中结合YOLOv3算法和CNN算法的优点,设计了一种能实时识别车辆多标签信息的算法。首先,利用具有较高识别速度和准确率的YOLOv3实现对视频流中车辆的实时监测和定位。在获得车辆的位置信息后,再将车辆信息传入经过简化与优化的类VGGNet多标签分类网络中,对车辆进行多标签标识。最后将标签信息输出至视频流,得到对视频中车辆的实时多标签识别。文中训练与测试数据集来源为KITTI数据集和通过Bing Image Search API获取的多标签数据集。实验结果证明,所提方法在KITTI数据集上的mAP达到了91.27,多标签平均准确率达到80%以上,视频帧率达到35fps,在保证实时性的基础上取得了较好的车辆识别和多标签分类效果。
关键词: 计算机视觉;车辆识别;多标签识别;目标检测;深度学习;
1引言
近年来,随着交通监控信息系统的日益普及,基于视频的车辆识别技术发展迅猛,已经成为智能交通领域的研究热点[1]。在实际应用中,车辆识别仍然有诸多困难,如光照、噪声等因素的影响,摄像头摆放位置不当,存在大量近似车型。为此,很多学者展开了研究,部分成果已经逐步得到应用。根据所采用的技术不同,车辆识别技术的发展主要可以分为两个阶段:基于浅层学习的阶段和基于深度学习的阶段。基于浅层学习的车辆识别技术一般先通过人工提取特征,再设计分类器进行识别。Bake等[2]在HSV颜色空间中使用H和S两个分量的颜色直方图构成二维特征向量,解决了车辆颜色特征的表达问题;Li等[3]用图像中的目标作为特征,采用空间金字塔技术引入空间信息来实现对特征的表达;Buch等[4]利用3D模型提取运动轮廓,并与投影的模型轮廓进行比较来识别车辆的位置和类别,很好地解决了车辆阴影对车辆识别的影响。但基于浅层学习的方法的网络结构比较简单,难以剥离出数据的深层特征,识别效果过分依赖于人为的特征提取。因此,当外界因素影响较大时,识别结果往往不理想。基于深度学习的方法通常建立一个用于数据分析和学习的神经网络,从原始数据中逐层提取特征,来提升分类精度和预测准确度。常见的模型包括卷积神经网络(Convolutional Neural Network,CNN)、受限波尔兹曼机(Restricted Boltzmann Machine,RBM)等。Rachmadi等[5]考虑到传统单支CNN网络的局限性,采用2条CNN数据提取2组深度特征,经过组合实现并行网络的同步学习,实现了车辆颜色的良好识别;Krause等[6]提出了一种基于协同分割和对齐生成目标局部标注的细粒度车辆识别方法,先将车辆目标分割出来,再对目标构建最小生成树,生成目标的局部关键区域,最后对这些关键区域提取深度特征以训练SVM分类器;Hu等[7]采用3种传统的手工特征作为深度网络的输入,并利用深度玻尔兹曼机方法(Deep Boltzmann Machine,DBM)可以有效融合特征的优点,来表示特征进行车辆识别。相比浅层学习方法,这些基于深度学习的方法不仅节省了研究人员的精力,而且在分类精度和识别准确度上都有了很大的进步。但这些模型对细小物体的检测和识别能力还是不足,往往存在漏检的问题;并且对于挖掘车辆深层信息,如车型、车色、位置坐标等方面的研究还较少。
为了更好地进行车位识别和深度信息挖掘,本文提出使用YOLOv3网络进行车辆识别。首先利用YOLOv3中的深度残差网络提取图像特征,然后引入锚点机制确定车辆的位置信息,最后通过多尺度预测获得不同尺度的车辆,从而解决前述网络难以检测细小物体的问题。在框定车辆后,将其输入改进后的VGGNet网络,实现对车辆的多标签分类,从而获取车辆的更深层信息。
2目标检测概况
目前,目标检测的主流算法分为两大类:基于候选区域(Region Proposal)的算法,如Faster R-CNN[8]和R-FCN[9]等;以及基于回归的算法,如YOLO[10]和SSD[11]等。
2014年,Girshick等在CNN的基础上提出了R-CNN[12]。R-CNN先通过Selective Search选取多个候选区域,在进行变形、膨胀、加框等操作后将其送入AlexNet中提取特征,最后将特征图送入支持向量机(SVM)分类器得到分类结果。鉴于其良好的性能,R-CNN称为目标检测领域第一个能真正工业化的算法。但在R-CNN算法中需要输入大小统一的图片,因此在剪裁图片时会引起严重变形,为了解决该问题,He等提出了SPP-Net[13],在卷积层提取特征后添加空间金字塔池化(Spatial Pyramid Pooling,SPP)来代替对原始图片的切割、变形等操作,使得网络不再依赖于输入图片的大小。之后,Fast R-CNN和Faster R-CNN借鉴SPP的思路,对R-CNN做出了改进。Faster R-CNN使用区域推荐网络(Region Proposal Network,RPN)替代了R-CNN中的Selective Search,在图像上提取多个矩形框(Anchor Box),再判断这些矩形框中是否存在目标,然后对这些目标进行识别,进一步提升网络性能。虽然Faster R-CNN通过RPN实现了共享的全卷积网络,但感兴趣区域(Region of Interesting,ROI)相关的子网络并未完全共享,因此重复计算全连接层是拖累检测速度的一大原因。针对这个问题,R-FCN将全连接层也改为全卷积层,实现了全网络中所有计算的共享,进一步提高了识别速度。总的来说,R-CNN的提出使得目标检测领域的研究迈进了一大步,但由于基于区域推荐的方法通常是两步式(TwoStage)算法,因此虽然检测精度高,但检测速度还有待提升。
2016年,Redmon等在CVPR上提出了一种全新的目标检测算法YOLO。值得一提的是,在此之前目标检测问题被认为是分类问题,提出的两步式算法如R-CNN系列也是基于分类思想的,即先产生候选区域再进行目标检测,而YOLO创新性地将目标检测问题看作回归问题,直接预测目标的位置信息和分类信息,然后进行目标检测和分类。YOLO对R-CNN系列算法的高精度、低速度的问题进行了折中,在保证一定检测精度的同时,提升了检测速度,使得实时目标检测成为现实。YOLO虽然平衡了检测速度和检测精度,但难以对小物体进行定位,由此Liu等借鉴Faster R-CNN的Anchor思想提出了SSD算法,并引入金字塔网络获得不同尺度的特征图进行目标识别,识别结果相比YOLO有了进一步的提升。此后,YOLOv2[14]、YOLOv3[15]以及各种基于SSD的改良算法[16,17]也相继被提出,对目标检测算法做了进一步的补充和改进。
3基于YOLOv3和改进VGGNet的车辆识别算法
3.1 基于YOLOv3的车辆检测
3.1.1 利用残差网络提取车辆特征
神经网络的深度对特征提取和识别效果有着重要影响,但事实上并不是网络越深越好。常规的网络堆叠在网络越来越深时,由于梯度消失的现象会更加明显,网络的训练效果也会越来越差。残差网络ResNet[18]提出的残差结构可以有效地缓解深层网络中梯度消失和梯度爆炸的问题。残差网络的基本单元是残差块(res_block,res_unit),残差网络由多个残差块堆叠而成。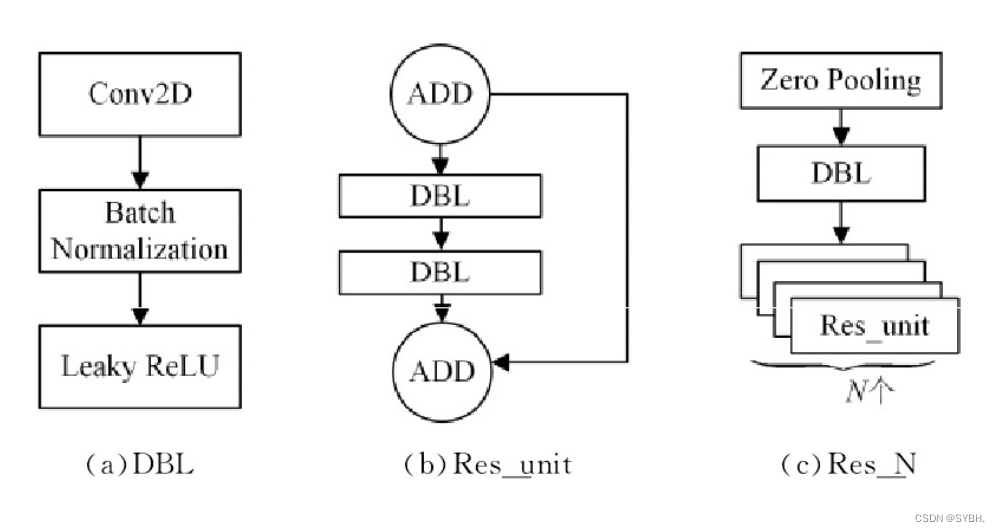
图1 YOLOv3基本组件及残差块结构 下载原图
Fig.1 Basic component and residual block structure of YOLOv3
残差块的主要结构分为两个分支:恒等映射和残差分支。残差网络的核心思路是利用旁路分支连接到后面的层,使后面的层可以直接学习残差,减少传统卷积层和全连接层信息损耗或丢失的问题。图1(a)给出了YOLOv3网络中的基本组件,称之为DBL结构,由卷积层、批量标准化(Batch Normalization,BN)和Leaky ReLU函数3部分组成。将该结构与残差块结构组合后得到如图1(b)所示的结构,该残差块包括两个DBL基本组件,输入和输出利用分支直接连接,相邻残差块之间使用ADD操作(Short Connection)连接,具体操作如式(1)所示:

其中,y为本层输出张量,x为上层输出张量,F(·)为本层转化函数,ADD操作将两个张量直接相加,这样保证了残差块的输入和输出张量的维度不变。而由多个残差块就组成了如图1(c)所示的残差块组,该结构先利用一个Zero Padding层改变张量尺寸,再连接一个DBL组件和残差块组(Res_N)。实际上,残差网络首先使用步长为2的卷积层对输入张量进行下采样来缩小图像尺寸,然后经过连续的3×3和1×1卷积层得到输出。
本文叠加了5个残差网络来提取特征,分别用于获取128×128,64×64,32×32,16×16,8×8分辨率下的特征。YOLOv3的深度残差网络结构如表1所列。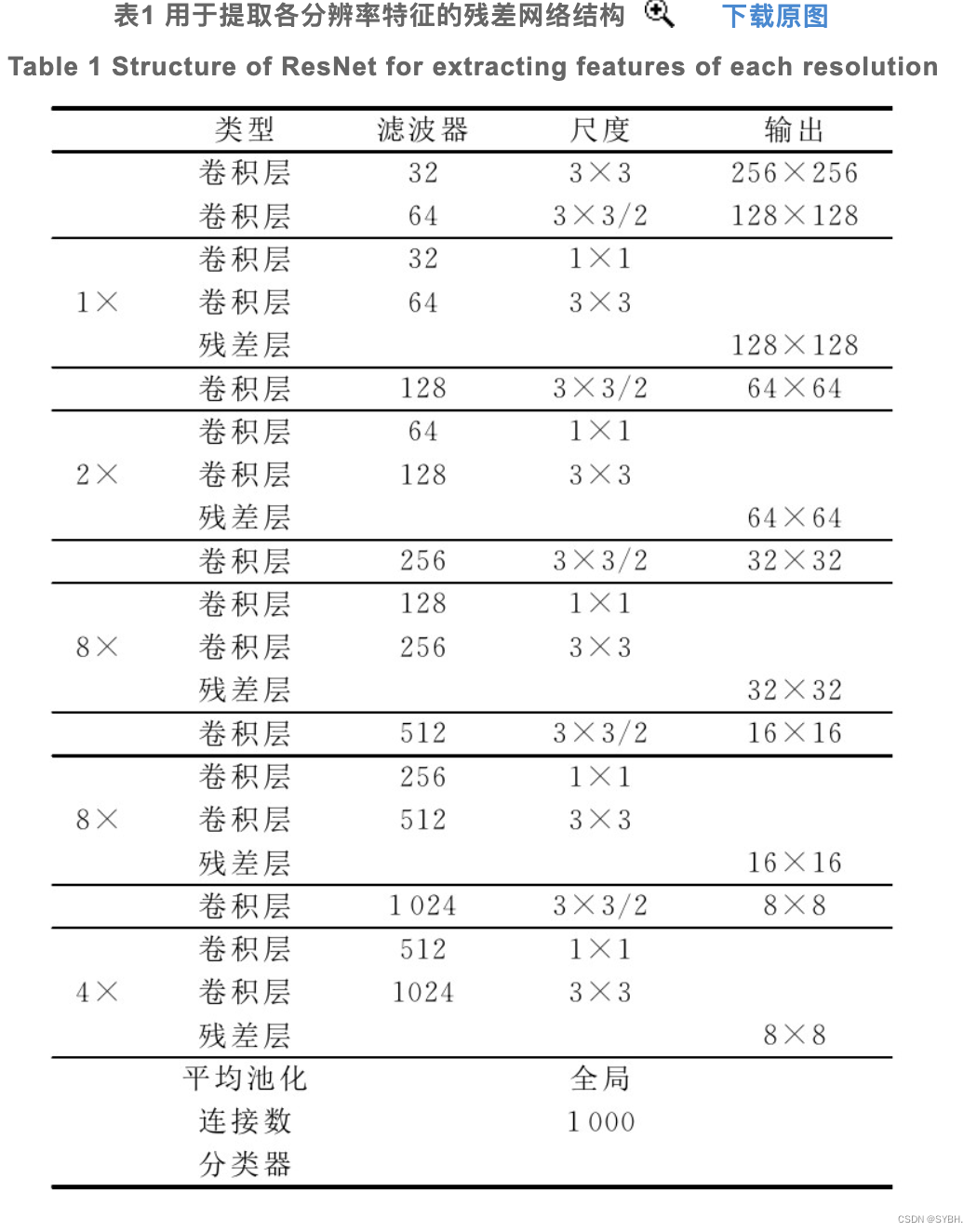
3.1.2 使用多尺度的边框回归预测结果
YOLOv3将图像均分为S×S个网格(Grid)用于预测目标,对于一个目标,若其中心点落在某个网格内,那么这个网格就负责预测这个目标的位置和分类。
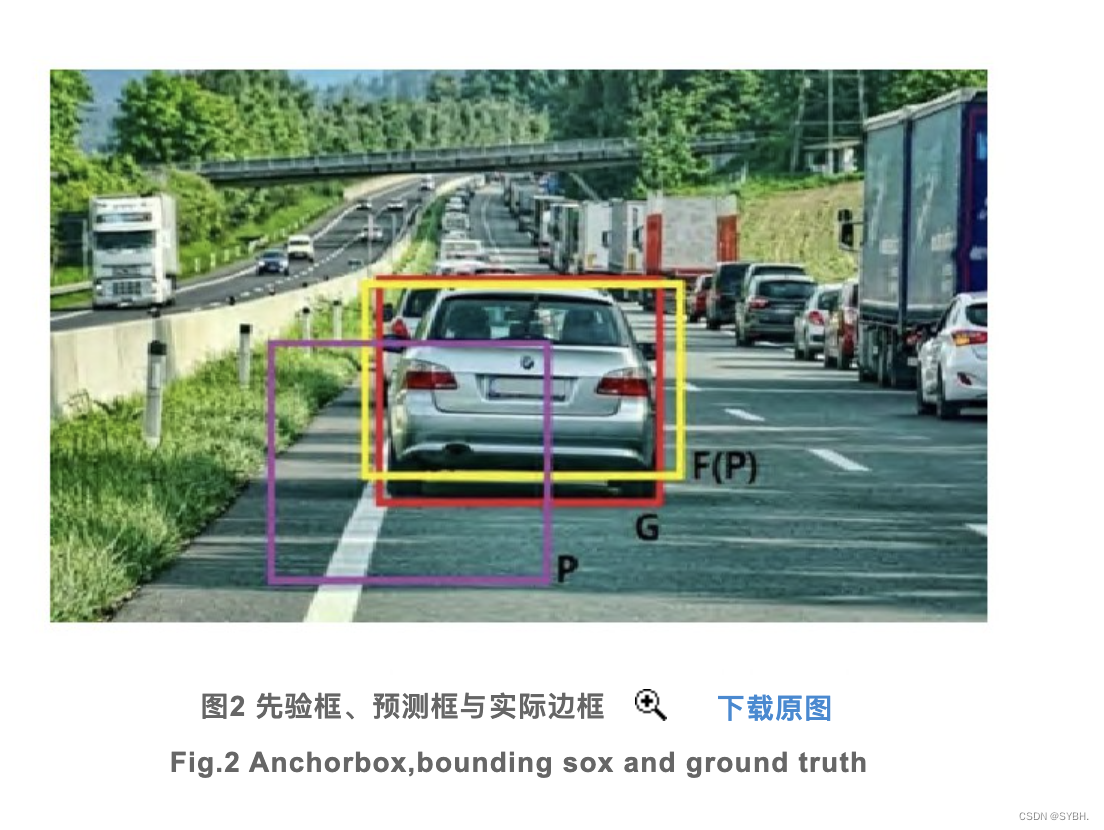
YOLO使用边框回归(Bounding Box Regression)的思路来实现对物体位置的预测。具体来说,就是预先选定先验框(Anchor Box),然后通过对先验框进行平移与尺度缩放,使之契合物体的实际边框。网格对物体位置的预测就是寻找先验框平移和尺寸缩放的参数。这里涉及到3个边框:1)物体的实际边框(Ground Truth),代表训练值;2)先验框(Anchor Box),代表预设的固定值;3)预测框(Bounding Box),代表深度网络训练后得到的预测值。
如图2所示,P代表先验框,G代表实际边框,F(P)代表预测框。衡量预测准确度的一个重要指标是预测边框与实际边框的交并比(Intersection over Union,IoU),其数学表达式如式(2)所示:

IoU的值反映了预测的准确性,因此一般先设定一个IoU阈值来判断预测框是否命中目标。因此,边框回归的主要思路就是:对于先验框P和实际框G,找到一个变换F(P),使得F(P)与G的交并比尽量大。
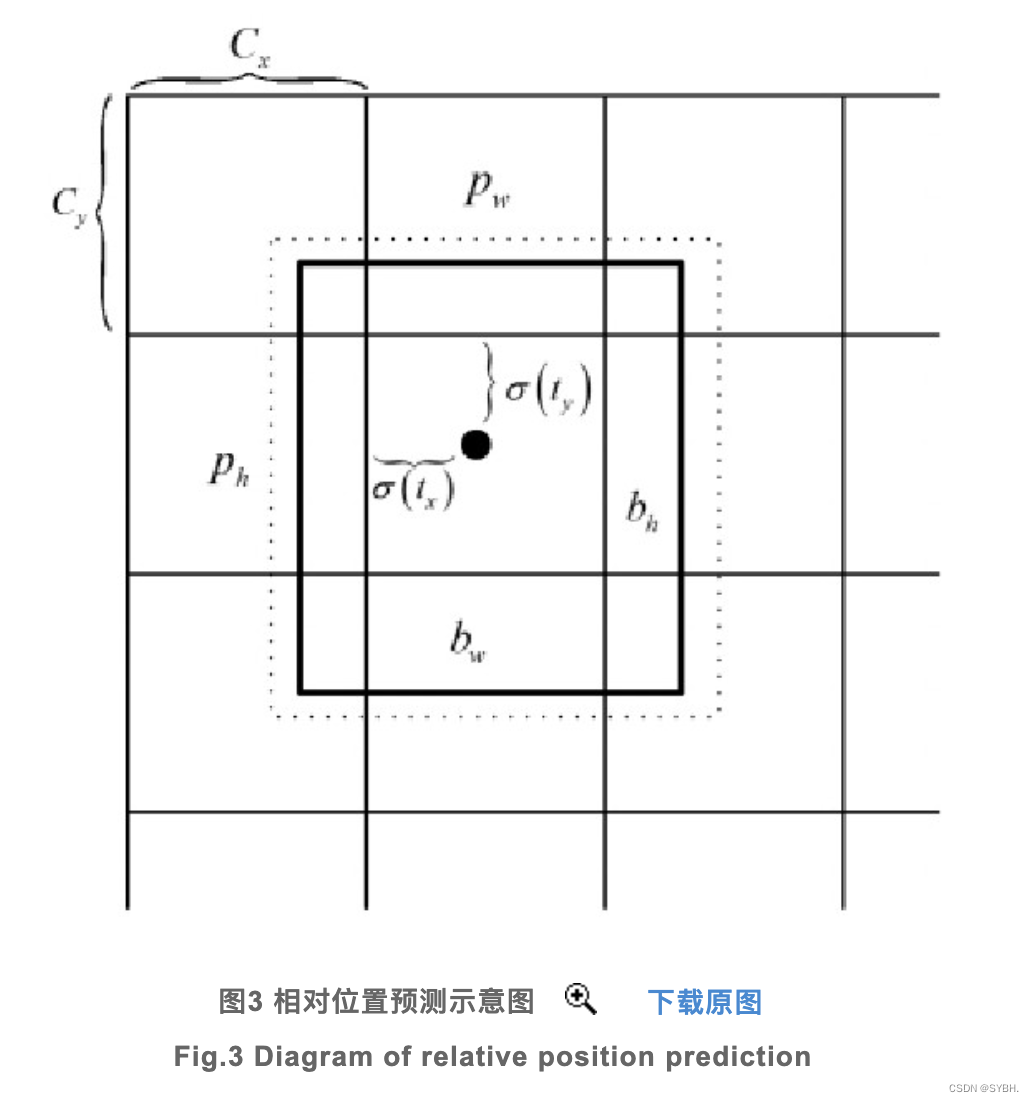
R-CNN使用简单的平移和尺度缩放来实现先验框到预测框的变换,由于R-CNN未对中心坐标做任何约束,使得其可以出现在图像的任意位置,而实际上先验框的设计是为了预测原图的部分区域,不受控制的预测框打破了原有的空间信息,导致训练早期需要很长的时间才能稳定。为了解决这个问题,需要对预测框坐标做一定的约束,使得其始终落在负责预测该物体的网格中。最后采用式(3)计算预测边框的绝对位置。
其中,bx,by,bw,bh为预测的绝对位置信息;cx,cy为当前网格左上角到图像网格左上角的距离;pw,ph为先验框的宽高;tx,ty,tw,th为网络训练需要学习的相对位置信息;σ(·)表示Sigmoid函数,目的是将tx,ty归一化,使得预测的位置信息落于特定的网络中。其具体关系如图3所示。
由于预测框是通过某一个先验框变化后得到的,因此先验框的选定能直接影响整个网络的训练速度和效果。而相比手动设置先验框,使用k-means聚类算法实现对不同数据集选定不同的先验框能起到更好的效果。与传统k-means算法的距离公式不同,YOLOv3使用IoU得分作为判断依据,具体如式(4)所示:

其中,dboxcentroid表示预测框到聚类中心点的距离,IoUboxcentroid表示预测框与实际边框的IoU值。
使用k-means聚类能有效地提高先验框的质量,但由于目标的检测是在S×S个网格的基础上进行的,因此在检测细小物体(如远方的车辆)时会有多个物体落在同一个网格中,从而造成漏检。为了弥补这个缺点,可以使用多个尺度的特征图分别检测不同尺寸的物体,降低漏检率。本文在3个尺度的特征图下直接回归预测车辆信息,同时在选择先验框时也设置了3种不同的尺寸,这意味着一共会产生9个先验框,从而避免细小事物被漏检。
3.2 改进的VGGNet
VGGNet[19]是由牛津大学的计算机视觉组和Google Deep Mind公司的研究员一起研发的一种网络结构,其突出的创新点在于提出了多个3×3的卷积层叠加能达到单个5×5或更大核的卷积层同样的感受野,不仅大幅度地降低了参数数量,而且利用了更多的非线性操作,使得网络深度更大且特征学习能力更强。从网络结构来看,传统的VGGNet设计了5组卷积,每组卷积包括2~3个3×3的卷积层,每组卷积层最后都会连接一个最大池化层用于缩小图片尺寸;最后使用3个全连接层和1个softmax层进行分类。
本文借鉴VGGNet的思路,设计了一个简化的VGGNet用于对已通过YOLOv3网络完成定位的车辆做进一步的多标签识别。本文缩减了VGGNet的网络结构,将5组卷积缩减至3组,将全连接层缩减至1层。缩减后的VGGNet识别效率得到了大幅提升,而识别率因为输入图像的高质量并不会出现显著降低。
传统VGGNet最终的激活函数是softmax,如式(5)所示,softmax令输出向量中各个分量的总和为1,这种形式体现的是各个分类可能性的比重,因此主要应用于单标签识别。本文将最终的激活函数由softmax改为Sigmoid,如式(6)所示。由于Sigmoid中输出向量的各个分量没有总和的约束,代表的是各个分类本身的可能性,因此可以应,用于多标签的识别。由于激活函数的更改,损失函数也从分类交叉熵更改为二元交叉熵。
最后本文设计图4所示的类VGGNet,用于对车辆进行多标签识别。
如图4所示,本文使用的类VGGNet结构的输入为96×96的RGB图像,经过3组卷积提取特征。3组卷积的卷积核大小均为3×3,卷积个数分别为1,2,2。每个卷积层后都紧跟着1个ReLU层和1个BN层用于规范数据。每组卷积最后都连接1个最大池化层和1个Dropout层[20],最大池化层用于改变张量尺寸,3个池化层的步长分别为3,2和2,窗口分别为3×3,2×2和2×2。3个Dropout层用于防止过拟合,其中概率均设置为0.25。经过3组卷积后,使用1个flatten将输出转为一维张量,然后经过1个通道数为1024的全连接层后送入最后的sigmoid分类器,得到通道数为N的最终输出,其中N为样本类别数量。
4实验与分析
本文使用公开数据集KITTI[21]作为YOLOv3的训练集,用于识别车辆并提取视频帧中的车辆位置;然后对KITTI中的部分数据进行了人工多标签标识,获得车辆的多标签数据集训练类VGGNet分类网络,用于对提取到的车辆图片进行进一步的多标签识别。实验基于Keras(后端使用Tensorflow-GPU)框架编程实现,PC机的CPU为Intel Core i97900x,GPU为NVDIA RTX2080Ti,内存为双通道16GB×2DDR4 3 000MHz,系统平台为Windows10专业版。
4.1 数据集
4.1.1 KITTI数据集
KITTI是目前在自动驾驶场景下最大的计算机视觉算法评测数据集。该数据集于德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,采用2个灰度摄像机、2个彩色摄像机、1个Velodyne 3D激光雷达、4个光学镜头以及1个GPS导航系统对市区、乡村和高速公路等场景进行数据采集。数据范围包括立体图像(stereo)、光流(optical flow)、视觉测距(visual odometry)、3D物体检测(object detection)和3D跟踪(tracking)等多个方面,用于评测计算机视觉技术在车载情况下的性能。整个数据集由389对立体图像和光流图,39.2km视觉测距序列以及超过200k3D标注物体的图像组成,以10Hz的频率采样及同步。数据集中每张图片包括最多15辆车和30个行人,这些目标还存在各种程度的遮挡和截断。数据集的原始数据包括8个分类标签,分别为car,van,truck,pedestrian,pedestrian(sitting),cyclist,tram以及misc。本文保留了车辆识别需要的3个标签,即car,van和truck,共6 970张图像作为YOLOv3的训练与测试数据集。其中按7∶3的比例将图片集随机分割成训练集和测试集,最后得到每个标签下的实际目标数量,如表2所列。
表2 Car,Van,Truck标签表示的实际目标数量 下载原图
Table 2 Actual target number of Car,Van and Truck
本文从上述数据集中,人工对3500个目标进行了多标签标识,分为5种颜色(Black,White,Orange,Blue,Red)、2种视图(Front,Rear)、3种车型(Car,Van,Truck)共计30种类别,并将目标从原KITTI数据集中分割出来,形成新数据集用于训练和测试类VGGNet多标签识别网络。
4.1.2 Bing Image Search API
Bing Image Search API是微软认知服务(Cognitive Services)中的一个接口,微软认知服务主要用于帮助用户在视觉、语言、文本等AI应用中提供数据。该接口帮助用户快速获得符合条件的图片集数据,包括图片列表的缩略图、完整的图像URL、发布网站的信息和图像元数据等。
为了弥补KITTI中人工再标识的样本数量不足,本文利用Bing Image Search API批量获取各类车辆图片并通过存放于不同文件夹来实现对图片集的快速标识。我们利用脚本获取了5种颜色、2种视图、3种车型共计30种类别,每种类别获取了300张,共计9000张图像。经过人工筛选掉不符合要求的图片后,共获得了5328张图像。图像数据集的最终数量如表3所列。表3中每项都由两个数字组成,前者代表该车型下Front标签的图片数量,后者代表Rear标签的图片数量。需要说明的是,由于Van标签有着较多的搜索歧义,为了保障最终数据集各个分类的规模接近,因此带有该标签的分类均额外获取了500张图片进行筛选。
表3 用于多标签识别的车辆数据集 下载原图
Table 3 Vehicle dataset for multi-label recognition
4.2 实验数据与分析
4.2.1 YOLOv3网络在KITTI数据集上的性能
本文首先将筛选得到的KITTI训练集中的图片缩放至416×416后送入YOLOv3网络中,经过5组残差网络构成的骨干网络提取特征。然后通过3种不同尺寸的特征图预测图像中车辆的位置信息和初步的分类信息(Car,Van,Truck)。这里使用k-means聚类方法计算KITTI数据集的预选框,具体为:(10,13),(15,30),(31,22),(30,55),(61,44),(60,117),(120,92),(150,192),(368,332)。因为本文使用了KITTI中的3个标签用于YOLOv3的训练,并修改网络结构的输出张量尺度为13×13×24,26×26×24,52×52×24。
针对KITTI数据集进行网络结构及参数调整后,本文测试了YOLOv3网络和其他常用网络在KITTI数据集上的表现,主要参考指标为均值平均精度(Mean Average Precision,mAP)与帧率(fps),具体结果如表4所列。
表4 不同网络在KITTI上的实验结果 下载原图
Table 4 Results of different networks in KITTI
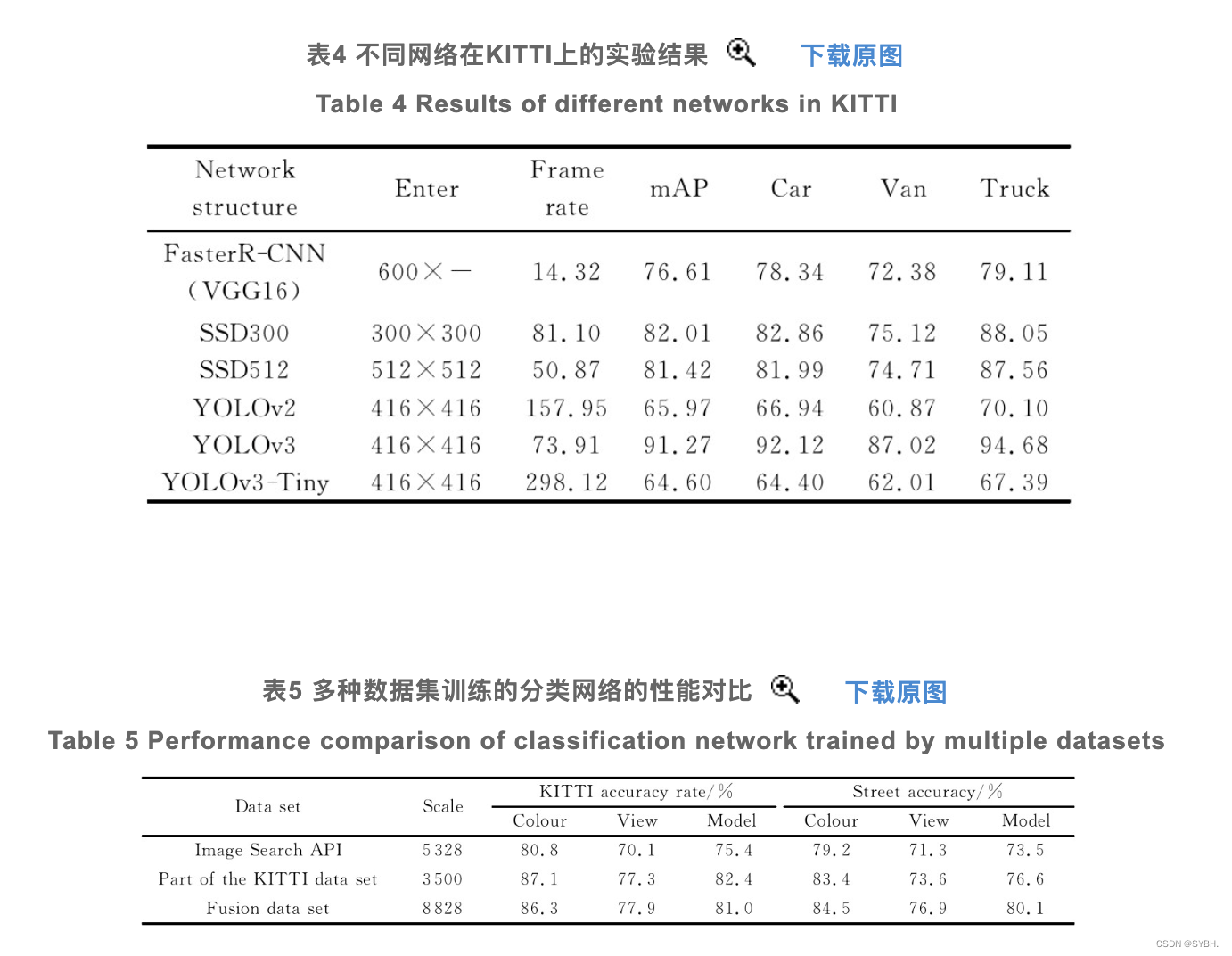
表5 多种数据集训练的分类网络的性能对比 下载原图
Table 5 Performance comparison of classification network trained by multiple datasets
从实验数据中可以看出,YOLOv3在KITTI数据集上有着很好的识别率和较高的识别速度,相比Faster R-CNN和SSD算法都更具优势。YOLOv2和YOLOv3-Tiny的骨干网络比YOLOv3简单很多,它们的识别速度比YOLOv3要快很多,但识别率相对较差。由于YOLOv3已经能够在实验环境中满足实时性的要求,因此本文使用YOLOv3作为检测车辆位置的算法。如果在生产环境中没有足够性能的GPU支持,那么使用YOLOv3-Tiny会是一个值得考虑的选择。
4.2.2 类VGGNet在车辆多标签识别上的性能
本文尝试了多种方法来获得多标签标识的数据集,用于训练多标签分类网络并测试其在KITTI数据集以及附近道路实拍视频上的性能,包括使用Bing Image Search API来获取并制作多标签标识车辆数据集、人工对KITTI数据集中的部分数据进行多标签标识,以及将两者相结合构成新数据集,如表5所列。
从表中可以看到,在多标签标识中,颜色是相对容易正确分类的,其次是车型,错误率最高的则是车辆视图。此外,由部分KITTI数据集训练的分类器在KITTI数据集上的表现最佳,在实际街道视频上的表现也要略好于Image Search API获取的数据集。这主要是因为Image Search API获取的图片有很大一部分属于车辆的特写图片,与街道的实际图片有一定的差距。融合数据集在KITTI数据集上的表现也较为不错,在街道实拍视频中的表现则比单KITTI数据集要更好,这主要获益于样本数量的提升。
4.2.3 帧率优化算法的性能测试
本文测试了YOLOv3检测目标的速度与类VGGNet多标签分类的速度。从表4可以看出,YOLOv3在实验环境中基本能满足实时识别视频的要求,而我们对多标签分类网络进行了测试,包括图像缩放等操作在内,识别速度为11.3fps,显然不能满足实时识别的要求。本文利用视频内车辆的位置变化是连续不突变的特性,通过保存检测目标上一帧的位置信息和上次多标签分类信息来减少重复计算量。帧率优化算法应用前后的对比实验结果如表6所列。
表6 帧率优化前后的整体算法表现 下载原图
Table 6 Algorithm performance before and after frame rate optimization
如表6所列,优化前,每帧需要对所有目标进行多标签分类,严重拖累了整体算法的识别速度。使用帧率优化算法后,视频的识别过程中减少了约90%的多标签分类计算(减少量取决于视频中车辆在窗口中相对位置的移动速度),使得整体算法的帧率维持在35帧以上,基本满足了实时识别的要求。
4.2.4 实验效果图
采用YOLOv3和改进后的类VGGNet结构进行车辆的多标签识别,得到的效果图如图6所示。
图6 总体识别效果图 下载原图
Fig.6 Overall recognition results
图6为连续的两帧,图中框出的目标为网络识别出来的目标,每个框的左上角标注有识别结果。识别框分为两种,深色框代表该目标在当前帧进行了多标签识别,浅色框则代表该目标沿用了上一帧的分类信息,图像左上角则标注有当前帧进行多标签分类的目标数量。可以看到,经过帧率优化后,每一帧中大部分目标都是不需要进行重复分类的,总体网络速度得到了较大提升。
5总结与展望
本文利用YOLOv3能够端对端快速检出目标位置信息的能力,完成了对视频中车辆的检测,然后设计了一种简化的VGGNet网络结构,通过更改最后的激活函数和网络的损失函数使其能够对YOLOv3输出的车辆分割图像进行多标签分类。通过对比实验,本文发现YOLOv3在KITTI数据集上有着优秀的性能,但多标签分类网络的识别速度较慢。针对这一缺陷,本文设计了一种优化算法,减少了网络中77%~95%的重复多标签分类计算,使整个识别算法的帧率维持在35fps以上。在保证基本满足实时性的要求上,做到了91.27的mAP,以及平均80%以上的多标签分类准确率。
本次实验也存在许多值得改进的地方。首先是数据集的选择,本文使用的KITTI数据集虽然是非常优秀的车辆识别数据集,但缺少多标签分类,使得本次实验在进行后续工作时遇到较大困难,后续工作一方面可以继续完成对KITTI数据集的多标签标记,另一方面应该积极构建本地街道的多标签数据集。此外,使用类VGGNet进行多标签分类的效率还是偏低,今后应该从改进YOLOv3网络着手,实现端对端的多标签分类网络结构。
结束语
本文结合YOLOv3算法和CNN算法的优点,设计了一种能实时识别车辆多标签信息的算法。利用具有较高识别速度和准确率的YOLOv3实现对视频流中车辆的实时监测和定位。本文方法在KITTI数据集上的mAP达到了91.27,多标签平均准确率达到80%以上,视频帧率达到35fps,在保证实时性的基础上取得了较好的车辆识别和多标签分类效果。
参考文献
[1] ZHANG Q,LI J F,ZHUO L.Review of Vehicle Recognition Technology[J].Journal of Beijing University of Technology,2018,44(3):382-392.
[2] BAEK N,PARK S M,KIM K J,et al.Vehicle color classification based on the support vector machine method[C]∥International Conference on Intelligent Computing(ICIC).2007:1133-1139.
[3] LI L J,SU H,XING E P,et al.Object bank:a high-level image representation for scene classification&semantic feature sparsification[C]∥Advances in Neural Information Processing Systems(ANIPS).2010:1378-1386.
[4] BUCH N,ORWELL J,VELASTIN S A.Detection and classification of vehicles for urban traffic scenes[C]∥Visual Information Engineering(VIE).2008:182-187.
[5] RACHMADI R F,PURNAMA I.Vehicle color recognition using convolutional neural network[J].arXiv,2015:1510.07391.
[6] KRAUSE J,JIN H,YANG J,et al.Fine-grained recognition without part annotations[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition(CVPR).2015:5546-5555.
[7] HU A,LI H,ZHANG F,et al.Deep Boltzmann machines based vehicle recognition[C]∥The 26th Chinese Control and Decision Conference(CCDC).2014:3033-3038.
[8] REN S,HE K,GIRSHICK R,et al.Faster R-CNN:towards real-time object detection with region proposal networks[J].International Conference on Neural Information Processing Systems,2017,37(6):1137-1149.
[9] DAI J,LI Y,HE K,et al.R-FCN:Object Detection via Regionbased Fully Convolutional Networks[C]∥Proceedings of the30th International Conference on Neural Information Processing System(NIPS).2016:379-387.
[10] REDMON J,DIVVALA S,GIRSHICK R,et al.You Only Look Once:Unified,Real-Time Object Detection[C]∥IEEE Conference on Computer Vision and Pattern Recognition(CVPR).2016:779-788.
[11] LIU W,ANGUELOV D,ERHAN D,et al.SSD:Single Shot MultiBox Detector[C]∥European Conference on Computer Vision(ECCV).2016:21-38.
[12] GIRSHICK R,DONAHUE J,DARRELL T,et al.Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation[C]∥IEEE Conference on Computer Vision and Pattern Recognition(CVPR).2014:580-587.
[13] HE K,ZHANG X,REN S,et al.Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition[J].IEEE Transactions on Pattern Analysis&Machine Intelligence,2014,37(9):1904-16.
[14] REDMON J,FARHADIA.YOLO9000:Better,Faster,Stronger[C]∥IEEE Conference on Computer Vision and Pattern Recognition(CVPR).2017:6517-6525.
[15] REDMON J,FARHADI A.YOLOv3:An Incremental Improvement[J].arXiv:1804.02767,2018.
[16] ZHANG Z,QIAO S,XIE C,et al.Single-Shot Object Detection with Enriched Semantics[C]∥IEEE Conference on Computer Vision and Pattern Recognition(CVPR).2018:5813-5821.
[17] ZHANG S,WEN L,BIAN X,et al.Single-Shot Refinement Neural Network for Object Detection[C]∥IEEE Conference on Computer Vision and Pattern Recognition(CVPR).2018,4203-4212.
[18] HE K,ZHANG X,REN S,et al.Deep Residual Learning for Image Recognition[C]∥IEEE Conference on Computer Vision and Pattern Recognition(CVPR).2016,770-778.
[19] SIMONYAN K,ZISSERMAN A.Very Deep Convolutional Networks for Large-Scale Image Recognition[J].arXiv:1409.1556,2014.
[20] SRIVASTAVA N,HINTON G,KRIZHEVSKYA,et al.Dropout:A Simple Way to Prevent Neural Networks from Overfitting[J].Journal of Machine Learning Research,2014,15(1):1929-1958.
[21] GEIGER A,LENZ P,STILLER C,et al.Vision meets robotics:The KITTI dataset[J].The International Journal of Robotics Research,2013,32(11):1231-1237.

![[数据结构]:05-循环队列(链表)(C语言实现)](https://img-blog.csdnimg.cn/a63177dcd6974290a3eaa455362d19a4.png)