目录
2.1 IO模块接口
2.2 PCD数据读写
(1) PCD数据解析
(2)PCD文件读写示例
2.3 PLY数据读写
(1)PLY数据解析
(2)PLY文件读写示例
2.4 OBJ数据读写
(1)OBJ数据解析
(2)OBJ文件读写示例
2.5 VTK数据读写
(1)VTK数据解析
(2)VTK文件读写示例
2.6 保存为PNG
2.1 IO模块接口
参考文章:PCL函数库摘要——IO模块_pcl/io_悠缘之空的博客-CSDN博客
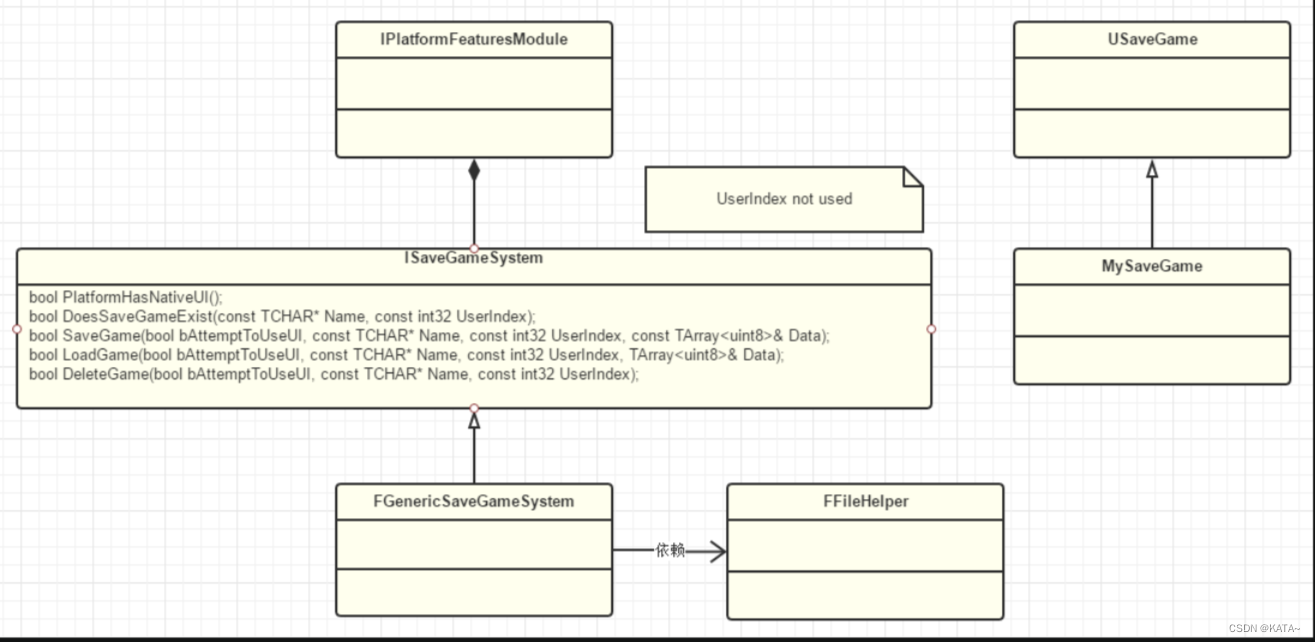
(1)Class pcl::FileReader
类FileReader定义了PCD文件的读取接口,主要用做其他读取类的父类。
类FileWriter 与 FileReader对应,是写人PCD文件的类接口定义,可以作为其它写入类的父类。
类Grabber为PCL1.X对应的设备驱动接口的基类定义。
(4)Class openni_wrapper::OpenNIDevice
类OpenNIDevice定义OpenNI设备的基类,继承该基类可以实现不同的OpenNI设备子类,用于获取包括红外数据、RGB数据、深度图像数据等。
(5)Class openni_wrapper::DeviceKinect
(6)Class openni_wrapper::DevicePrimesense
(7)Class openni_wrapper::DeviceXtionPro
以上3个类分别封装了Kinect,Primesense,XtionPro相关设备操作和数据获取操作实现,其详细接口参考其父类OpenNIDevice的关键函数说明。
(8)Class openni_wrapper::DeviceONI
封装了利用ONI文件回放虚拟类kinect设备的操作和数据获取操作实现,其详细接口参考其父类OpenNIDevice的关键函数说明。
(9)Class openni_wrapper::OpenNIDriver
类OpenNIDriver采用单例模式实现对底层驱动的封装,里面包含一xn::Context对象,提供给所有设备使用。该类提供了枚举和访问所有设备的方法实现。
(10)Class openni_wrapper::OpenNIException
类OpenNIException封装一般的异常处理实现。
(11)Class openni_wrapper::Image
类Image是简单的图像数据封装基类。
(12)Class openni_wrapper::ImageBayerGRBG
(13)Class openni_wrapper::ImageRGB24
(14)Class openni_wrapper::ImageYUV422 Class Reference
以上3个类分别实现了对原始数据 BayerGRBG ,RGB24、YUV422到图像转化接口,详细参考其父类关键函数说明。
类OpenNIGrabber 实现对OpenNI设备(例如Primesense PSDK,MicrosoftKinect,Asus XTion Pro/Live)数据的采集接口,详细参考其父类Grabber 关键函数说明。
以上两个类分别是PCD、PLY文件格式读入接口的实现,详细参考其父类pcl: :FileReader。
以上两个类分别是PCD、PLY文件格式写出接口的实现,详细参考其父类pcl: :FileWriter。
(20)Class pcl::io::IOException
类pcl::io::IOException 是I/O相关的异常处理接口实现,详细参考其父类PCLEx-ception。
(21)I/O模块其他关键成员
2.2 PCD数据读写
(1) PCD数据解析
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z _
SIZE 4 4 4 1
TYPE F F F U
COUNT 1 1 1 4
WIDTH 112099
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 112099
DATA binary- VERSION 0.7:指定pcd文件的版本。
- FIELDS:指定每个点可以具有的维度,以及每个维度所代表的含义。例如:FIELDS x y z r g b表示该点的位置信息(x,y,z),颜色信息(r,g,b)。
- SIZE:以字节为单位指定每个数据所占用的内存。
- TYPE:指定每个数据的数据类型。其中无效的点的通常存储为NAN类型。
I:可表示int8,int16,int32。
U:可表示uint8,unit16,uint32。
F:表示float(上图所用的为浮点类型)。
- COUNT:指定每个维度有多少元素。例如xyz数据通常只有一个元素。
- WIDTH:指定数据点的宽度,它包含两个含义:(1)可指定点云总个数(与POINTS相同),用于无组织的数据。(2)可指定有组织点云数据的宽度(连续点的总数)。
- HEIGTH: 指定数据点的高度,它包含两个含义:(1)可指定有组织的点云数据的高度(总行数)。(2)对未组织的数据,它被设置为1。
- POINTS:指定点云总个数。
- VIEWPOINT:采集数据时的视点(由平移tx,ty,tz和四元数qw,qx,qy,qz组成)。
- DATA:点云数据存储的数据类型(支持ascii和binary)。如果以ASCII形式,每一点占据一个新行。
(2)PCD文件读写示例
cmake_minimum_required(VERSION 2.6)
project(pcd)find_package(PCL 1.10 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable(pcd pcd.cpp)target_link_libraries (pcd ${PCL_LIBRARIES})install(TARGETS pcd RUNTIME DESTINATION bin)
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std;int main()
{pcl::PCDReader reader;pcl::PCLPointCloud2 org;pcl::io::loadPCDFile("../pcdfile.pcd",org);for(auto &f : org.fields)cout << f.name;pcl::PointCloud<pcl::PointXYZ> cloud;pcl::fromPCLPointCloud2<pcl::PointXYZ>(org,cloud);pcl::PCDWriter writer;pcl::io::savePCDFileBinaryCompressed("../savepcdfile.pcd",cloud);pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);viewer->setWindowName("PCDFile");viewer->addPointCloud(cloud.makeShared());while (!viewer->wasStopped()){viewer->spinOnce(100);}return 0;
}
2.3 PLY数据读写
(1)PLY数据解析
典型的PLY文件结构:
- 头部
- 顶点列表
- 面片列表
- 其他元素列表
ply
format ascii 1.0
element vertex 14806
property float x
property float y
property float z
property float nx
property float ny
property float nz
element face 0
property list uchar int vertex_indices
end_header
0.91441 -0.536438 0.822624 -0.0442205 -0.930906 0.362575
0.933494 -0.545228 0.820276 0.073409 -0.981856 0.174844
...(2)PLY文件读写示例
cmake_minimum_required(VERSION 2.6)
project(ply)find_package(PCL 1.10 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable(ply ply.cpp)target_link_libraries (ply ${PCL_LIBRARIES})install(TARGETS ply RUNTIME DESTINATION bin)#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/io/ply_io.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std;int main()
{pcl::PCLPointCloud2 cloud;pcl::io::loadPLYFile("../ply.ply",cloud);pcl::PLYReader reader;pcl::PLYWriter writer;pcl::PointCloud<pcl::PointXYZ> cloud1;pcl::fromPCLPointCloud2<pcl::PointXYZ>(cloud,cloud1);pcl::io::savePLYFile("saveply.ply",cloud,Eigen::Vector4f::Zero (),Eigen::Quaternionf::Identity (),true);pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);viewer->setWindowName("PLYFile");pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> color(cloud1.makeShared(), "y");viewer->addPointCloud(cloud1.makeShared(),color);viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,2);while(!viewer->wasStopped())viewer->spinOnce(100);return 0;
}
2.4 OBJ数据读写
(1)OBJ数据解析
mtllib cube.mtl
g default
v -0.500000 -0.500000 0.500000
v 0.500000 -0.500000 0.500000
v -0.500000 0.500000 0.500000
v 0.500000 0.500000 0.500000
v -0.500000 0.500000 -0.500000
v 0.500000 0.500000 -0.500000
v -0.500000 -0.500000 -0.500000
v 0.500000 -0.500000 -0.500000
vt 0.001992 0.001992
vt 0.998008 0.001992
vt 0.001992 0.998008
vt 0.998008 0.998008
...mtllib:代表材质库,通常指向到某个mtl文件
- v(vertices):几何形状的顶点,因为物体是由面构成的,而面是由线构成的,线由点构成的,所以无论是何形状,都必须要有几何顶点;一些应用支持顶点颜色,通过在x y z后面跟上red, green, blue值来表示。颜色值的范围为0到1.0。
- vt(vertex texture):顶点纹理,代表当前顶点对应纹理图的哪个像素,通常是0-1,如果大于1,就相当于将纹理重新扩充然后取值,比如镜像填充、翻转填充之类的,然后根据纹理图的宽高去计算具体像素位置
- vn(vertex normal):顶点法线,物理里面有说过眼睛看到物体是因为光线经过物体表面反射到眼睛,所以这个法线就是通过入射光线计算反射光线使用的法线。
- f(face):大部分几何体都包括面,除非是像头发丝那一类模型只包含一根根头发的顶点,而且大部分模型的头发也用的面片的方法渲染的。
其他参考:obj格式解析_obj格式详解_风翼冰舟的博客-CSDN博客
(2)OBJ文件读写示例
cmake_minimum_required(VERSION 2.6)
project(obj)find_package(PCL 1.10 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable(obj obj.cpp)target_link_libraries (obj ${PCL_LIBRARIES})install(TARGETS obj RUNTIME DESTINATION bin)#include <iostream>#include <pcl/point_cloud.h>
#include <pcl/io/obj_io.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std;int main()
{pcl::PolygonMesh mesh;pcl::PCLPointCloud2 cloud;pcl::TextureMesh tmesh;#if 0pcl::io::loadOBJFile("../obj.obj",cloud);pcl::io::loadOBJFile("../obj.obj",mesh);pcl::io::loadOBJFile("../obj.obj",tmesh);
#elsepcl::OBJReader objreader;objreader.read("../obj.obj",cloud);objreader.read("../obj.obj",mesh);objreader.read("../obj.obj",tmesh);
#endifpcl::io::saveOBJFile("../saveobj.obj",mesh);pcl::PointCloud<pcl::PointXYZ> cloudxyz;pcl::fromPCLPointCloud2<pcl::PointXYZ>(cloud,cloudxyz);pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);viewer->setWindowName("OBJFile");pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> color(cloudxyz.makeShared(), "z");viewer->addPointCloud(cloudxyz.makeShared(),color);viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,2);viewer->addPolygonMesh(mesh);while(!viewer->wasStopped())viewer->spinOnce(100);return 0;
}
2.5 VTK数据读写
(1)VTK数据解析
# vtk DataFile Version 2.0
vtk output
ASCII
DATASET POLYDATA
POINTS 2312 float
0.263107 0 0.425176 0.33131 0 0.374478 0.389942 0 0.312962
0.43731 0 0.242405 0.472045 0 0.164845 0.493143 0 0.0825238 - 第一行是说明vtk文件的version(这是legacy 版本,此外还有较新的xml版本)
- 第二行是文件描述,随便写什么
- 第三行是ASCII或者BINARY
- 第四行是说明数据类型,有STRUCTURED_POINTS,STRUCTURED_GRID,RECTILINEAR_GRID,POLYDATA
- 后面为数据,它分为三个部分:POINTS 点数据,CELSS 网格数据,CELL_TYPES网格类型
(2)VTK文件读写示例
cmake_minimum_required(VERSION 2.6)
project(vtkfile)find_package(PCL 1.10 REQUIRED)
find_package(VTK REQUIRED)include(${VTK_USE_FILE})
link_directories(${VTK_LIBRARY_DIRS})include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable(vtkfile vtkfile.cpp)target_link_libraries (vtkfile ${PCL_LIBRARIES} ${VTK_LIBRARIES})
target_link_libraries (vtkfile ${VTK_LIBRARIES})install(TARGETS vtkfile RUNTIME DESTINATION bin)
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/io/vtk_io.h>
#include <pcl/io/vtk_lib_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/io/obj_io.h>using namespace std;int main()
{pcl::PCLPointCloud2 cloud;pcl::PolygonMesh mesh,mesh1,mesh2;#if 0pcl::io::loadPolygonFile("../vtk.vt",mesh);
#elsepcl::io::loadPolygonFileVTK("../vtk.vtk",mesh);pcl::io::loadPolygonFileVTK("../vtk.vtk",mesh2);
#endifpcl::PointCloud<pcl::PointXYZ> cloudxyz;pcl::fromPCLPointCloud2<pcl::PointXYZ>(mesh.cloud,cloudxyz);pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);viewer->setWindowName("VTKFile");pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> color(cloudxyz.makeShared(),"y");viewer->addPointCloud(cloudxyz.makeShared(),color);viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,3);viewer->addPolygonMesh(mesh);while(!viewer->wasStopped())viewer->spinOnce(100);return 0;
}
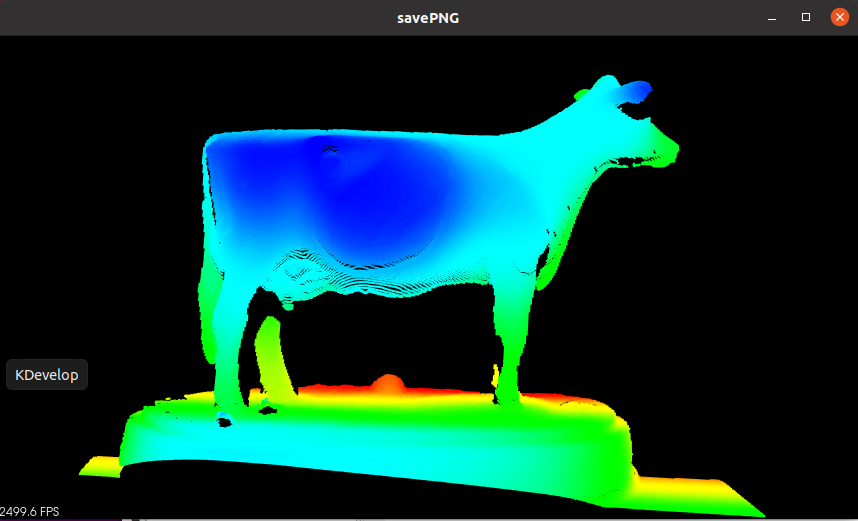
2.6 保存为PNG
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <pcl/io/png_io.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std;int main()
{pcl::PCDReader reader;pcl::PCLPointCloud2 org;pcl::io::loadPCDFile("../cow.pcd",org);for(auto &f : org.fields)cout << f.name << endl;pcl::PointCloud<pcl::PointXYZ> cloud;pcl::fromPCLPointCloud2<pcl::PointXYZ>(org,cloud);pcl::io::savePNGFile("../savepng.png",cloud,"rgb");pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> color(cloud.makeShared(), "z");pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);viewer->setWindowName("savePNG");viewer->addPointCloud(cloud.makeShared(),color);viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,2);while(!viewer->wasStopped())viewer->spinOnce(100);return 0;
}}